Raspiberry Camera详解+picamera库+Opencv控制
使用树莓派的摄像头,将树莓派自身提供的picamera的API数据转换为Python Oencv可用图像数据:
# import the necessary packages
from picamera.array import PiRGBArray
from picamera import PiCamera
import time
import cv2
# initialize the camera and grab a reference to the raw camera capture
camera = PiCamera()
camera.resolution = (640, 480)
camera.framerate = 32
camera.hflip = True
camera.vflip = True
rawCapture = PiRGBArray(camera, size=(640, 480))
# allow the camera to warmup
time.sleep(0.1)
# capture frames from the camera
for frame in camera.capture_continuous(rawCapture, format="bgr", use_video_port=True):
# grab the raw NumPy array representing the image, then initialize the timestamp
# and occupied/unoccupied text
image = frame.array
# show the frame
cv2.imshow("Frame", image)
key = cv2.waitKey(1) & 0xFF
# clear the stream in preparation for the next frame
rawCapture.truncate(0)
# if the `q` key was pressed, break from the loop
if key == ord("q"):
break
这里简单的讲一下picamera对象的相关内容:
1、首先使用picamera模块当中的PiCamera方法创建返回一个camera的对象:
camera = PiCamera()
2、初始化camera对象当中的相关参数(可设置也可以读取):
camera.saturation = 80 # 设置图像视频的饱和度
camera.brightness = 50 # 设置图像的亮度(50表示白平衡的状态)
camera.shutter_speed = 6000000 # 相机快门速度
camera.iso = 800 # ISO标准实际上就是来自胶片工业的标准称谓,ISO是衡量胶片对光线敏感程度的标准。如50 ISO, 64 ISO, 100 ISO表示在曝光感应速度上要比高数值的来得慢,高数值ISO是指超过200以上的标准,如200 ISO, 400 ISO
camera.sharpness = 0 #设置图像的锐度值,默认是0,取值范围是-100~100之间
camera.framrate = 32 #这里可能用的Fraction是一个分数模块来存储分数1/6,保证分数运算的精度(记得调用模块:from fractions import Fraction)
camera.hflip = Ture # 是否进行水平翻转
camera.vflip = False #是否进行垂直翻转
camera.rotation = 0 #是否对图像进行旋转
camera.resolution = (280,160) #设置图像的width和height
a_gain = camera.analog_gain #这个值表示摄像头传感器件到数字装换之前的模拟信号的增益,格式是Fraction的格式 一般似乎也用不上
d_gain = camera.digital_gain #这个值表示摄像头的数字增益大小 一般似乎也用不上
camera.led = False #值为False那么led为关灯的状态,True为开灯的状态
注:camera.led这个参数在Raspberry 3代上已经不能使用了!原因是说已经将摄像头led的控制GPIO重定向到了外部扩展接口上......所以你修改/boot/config.txt文件的内容也是没用的,当然对于pi3这一代树莓派修改这个文件也是无济于事。无奈啊~
ISO参数介绍:
感光度,英文名称为 International Organization for Standardization (ISO),说到相机中的ISO参数不得不提一下胶片速度(Film Speed)。胶片速度是感光胶片对光敏感度的度量。相对而言灵敏度差的胶片,对应一个低速的索引值,这样就会需要对光进行更长的曝光来达到高灵敏胶片的效果,因此称之为低速胶片,高灵敏的胶片称之为高速胶片,设置的范围ISO100到ISO28000。
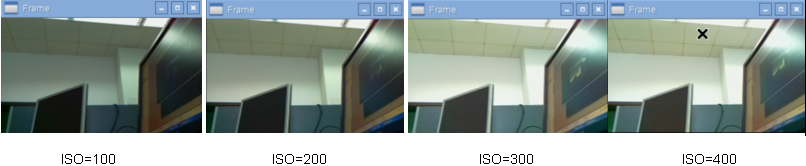
ISO调节的实验结果(测试条件:Frame_Rate=32 快门速度shutter_speed=6000000 饱和度saturation = 100 图像亮度brightness = 50)
Shutter参数介绍:
快门,英文名称为Shutter,快门是相机上控制感光片有效曝光时间的一种装置。快门的工作原理是这样的,为了保护相机内的感光器件,不至于曝光,快门总是关闭的;拍摄时,调整好快门速度后,只要按住照相机的快门释放钮(也就是拍照的按钮),在快门开启与闭合的间隙间,让通过摄影镜头的光线,使照相机内的感光片获得正确的曝光,光穿过快门进入感光器件,写入记忆卡。快门速度一般的表示方法是1/100s、1/30s、2s。
Shutter调节的实验结果(测试条件:Frame_Rate=32 ISO感光度=800 饱和度saturation = 100图像亮度brightness = 50)

Saturation参数介绍:
所谓的饱和度,指的其实是色彩的纯度,纯度越高,表现越鲜明,纯度较低,表现则较黯淡,色饱和度表示光线的彩色深浅度或鲜艳度,取决于彩色中的白色光含量,白光含量越高,即彩色光含量就越低,色彩饱和度即越低,反之亦然。saturation的取值范围是 0-100之间。
Saturation调节的实验结果(测试条件:Frame_Rate=32 快门速度shutter_speed=6000000 ISO感光度=800 图像亮度brightness = 50)

Brightness亮度参数介绍:
色彩亮度(“Color Brightness”)的新标准将用来测量色彩的光输出情况,评价摄像机的色彩表现,用户可根据此标准的规格来更好地了解产品性能。 设置的范围是0-100之间,50表示的是白平衡状态。
Brightness调节的实验结果(测试条件:Frame_Rate=32 快门速度shutter_speed=6000000 ISO感光度=800 饱和度saturation = 100)

Sharpness锐度参数介绍:
Sharpness决定了图像对细节的表达程度,图像的锐度越高表示图像对物体的边缘和细节的描述越好,从下面的测试结果却是能够看到细节的相关变化却是比较明显。
Sharpness调节的实验结果(测试条件:Frame_Rate=32 ISO感光度=800 饱和度saturation = 0 图像亮度brightness = 50)

光圈参数介绍:(树莓派相机的参数中似乎光圈的大小是固定的,不可以调节,这里列出来记录,方便后面的使用和理解)
光圈英文名称为Aperture,光圈是一个用来控制光线透过镜头,进入机身内感光面的光量的装置,它通常是在镜头内,光在通过镜头某个位置的多片金属叶片(收拢之后)则能在镜头上就控制光线进入的量。我们平时所说的光圈值 F2.8、F8、F16等是光圈“系数”,是相对光圈,并非光圈的物理孔径,与光圈的物理孔径及镜头到感光器件(胶片或CCD或CMOS)的距离有关。
简单相机的结构图:

相关参数的设置技巧:
1、ISO感光度的设置技巧
- 一般白天光线充足的情况ISO是100到200。
- 在黑暗的条件下(如下雨天),ISO调到300-400,比较暗调到800,灯光非常暗(太阳下山后),调到1000以上,拍夜景(如夜间庆典、演唱会)调到1600以上。
- ISO调到越高,拍出来的照片噪点就越多,所以ISO不是越高越好,只是在光线不足的情况下使用,并且尽可能调低ISO数值。
2、快门速度的设置技巧
- 一般情况下,正常快门速度是在60分之一秒到80分之一秒。
- 拍摄行人、阴天或者日落时候的运动对象快门速度1/125秒。
- 拍摄高速运动的物体或画面,快门速度360/1秒~600/1秒,如拍打篮球的画面。
- 拍摄下落的水滴需要1/1000秒。
- 拍绸缎感的流水,或者夜景汽车灯河用慢速快门。
- 拍运动定格用快速快门。
- 室外光线条件好,则快门可以较快,光线暗则要放慢快门速度。
- 快门数一般是没用常用的,你要是想设置为默认快门,那么就是用A档或是自动挡吧!只有这两个档位是默认快门数。像S档和M档都是可以设置快门速度的。
3、使用camera对象当中的相关函数API:
图像拍照+实时视频
camera.capture('test.jpg', use_video_port = False) # 拍摄一张图片,图片的名称为test.jpg use_video_port用来指定是通过视频接口来使用还是普通的接口,详解如下
camera.capture_continuous(rawCapture, format="bgr", use_video_port=True) # 连续的拍摄一组视频帧,将每一帧都存储在rawCapture这个变量当中,存储的格式是bgr的格式,使用了摄像头的接口
1 capture(output, format=None, use_video_port=False, resize=None, splitter_port=0, bayer=False, **options) 从摄像头中获得一张图像,将这张图像存储在output当中.
2 capture_continuous(output, format=None, use_video_port=False, resize=None, splitter_port=0, burst=False, bayer=False, **options) 从摄像头上获取连续的视频流,相关的参数和上面的函数相似
参数output是一个用来保存图像数据的区域:
- output为字符串string的时候,表示将得到的数据写入到文件名是string文件当中
- output是一个可以写入的对象时,就相当于将图像的数据追加append到对象的后面
- output也可以是一个具有buffer protocal数据类型的数据(要保证足够大的写入空间来保存图像)
参数format是表示文件的类型,主要有下面的文件类型:
'jpeg'- Write a JPEG file'png'- Write a PNG file'gif'- Write a GIF file'bmp'- Write a Windows bitmap file'yuv'- Write the raw image data to a file in YUV420 format'rgb'- Write the raw image data to a file in 24-bit RGB format'bgr'- Write the raw image data to a file in 24-bit BGR format
参数use_video_port用来表示获取图像的端口:
- True 表示从视频端口获取图像,这个时候为了保证视频的帧速,画质就会降低
- False 表示从标准的端口获取图像,图像的质量较高,获取的时间较长
下面是Camera拍照的结果对比(注意,这里的相机参数我都没有设置全是默认的参数):
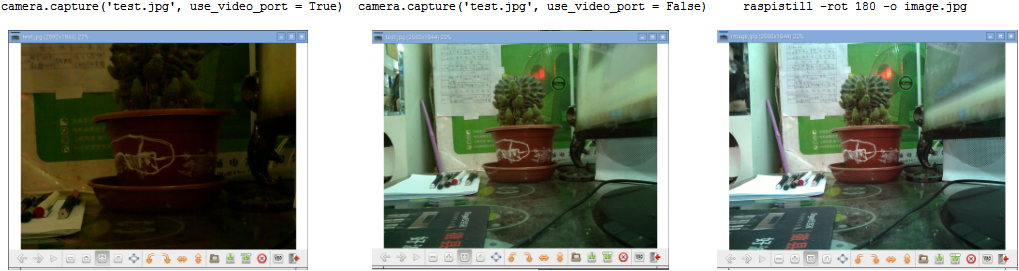
conclusion: 这里我们明显能够看到,当use_video_port的参数为True和False的图像参数质量的不同之处,所以说在拍照的时候就要记得采用False参数!
视频录像
camera.start_recording('Video.mjpeg',format = 'mjpeg') # 开始进行录制视频的参数设置,param1是录制视频的文件名 param2是设置录制文件的格式 param3是录制视频的尺寸大小,详细如下解释
camera.wait_recording(20) # 启动开始录制,等待总共录制的时间为20s 主要单位是s秒
camera.stop_recording() # 停止视频的录制功能
实验录制结果如下:

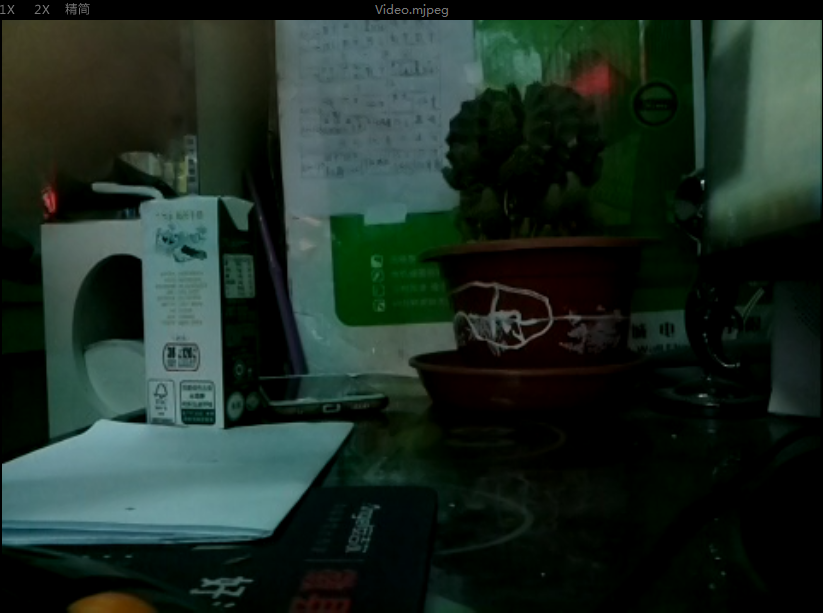
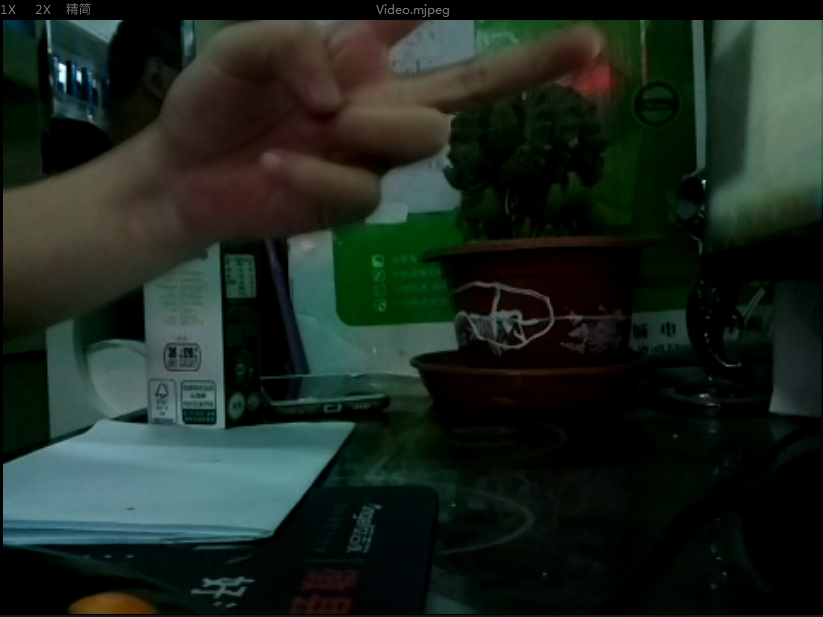 不过看起来效果似乎变暗了,不知道是不是灯光的问题。。。
不过看起来效果似乎变暗了,不知道是不是灯光的问题。。。
上面的测试文件为Test_Camera.py 具体的代码我上传到了我博客的文件空间中,大家可以下载使用(总共有三个Section,每调用一个Section的时候去掉注释即可)。
备注:使用摄像头的过程中如果遇到如下的错误说明已经有进程调用了Raspberry的摄像头了,硬件已经被占用,所以不能启动摄像头。
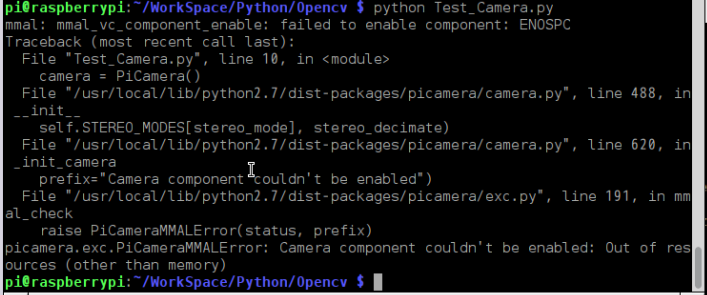 这个时候你只需要关闭对应调用摄像头的进程,释放摄像头的资源就可以继续使用了。
这个时候你只需要关闭对应调用摄像头的进程,释放摄像头的资源就可以继续使用了。
完~
Raspiberry Camera详解+picamera库+Opencv控制的更多相关文章
- Raspberry Camera详解+picamera库+Opencv控制
使用树莓派的摄像头,将树莓派自身提供的picamera的API数据转换为Python Oencv可用图像数据: # import the necessary packages from picamer ...
- Python正则表达式详解——re库
一.简介 1.1.相关链接 官方文档: Python2:https://docs.python.org/2/library/re.html Python3:https://docs.python.or ...
- 【python】详解numpy库与pandas库axis=0,axis= 1轴的用法
对数据进行操作时,经常需要在横轴方向或者数轴方向对数据进行操作,这时需要设定参数axis的值: axis = 0 代表对横轴操作,也就是第0轴: axis = 1 代表对纵轴操作,也就是第1轴: nu ...
- 详解树莓派Model B+控制蜂鸣器演奏乐曲
步进电机以及无源蜂鸣器这些都需要脉冲信号才能够驱动,这里将用GPIO的PWM接口驱动无源蜂鸣器弹奏乐曲,本文基于树莓派Mode B+,其他版本树莓派实现时需参照相关资料进行修改! 1 预备知识 1.1 ...
- (四)、 nodejs中Async详解之一:流程控制
为了适应异步编程,减少回调的嵌套,我尝试了很多库.最终觉得还是async最靠谱. 地址:https://github.com/caolan/async Async的内容分为三部分: 流程控制:简化十种 ...
- Async详解之一:流程控制
为了适应异步编程,减少回调的嵌套,我尝试了很多库.最终觉得还是async最靠谱. 地址:https://github.com/caolan/async Async的内容分为三部分: 流程控制:简化十种 ...
- Android 自带 camera 详解
在本文中 需要考虑的问题 概述 Manifest声明 使用内置的摄像头应用程序 捕获图像的intent 捕获视频的intent 接收摄像头intent的结果 创建摄像头应用程序 检测摄像头硬件 访问摄 ...
- nodejs中Async详解之一:流程控制
为了适应异步编程,减少回调的嵌套,我尝试了很多库.最终觉得还是async最靠谱. 地址:https://github.com/caolan/async Async的内容分为三部分: 流程控制:简化十种 ...
- 详解 boost 库智能指针(scoped_ptr<T> 、shared_ptr<T> 、weak_ptr<T> 源码分析)
一.boost 智能指针 智能指针是利用RAII(Resource Acquisition Is Initialization:资源获取即初始化)来管理资源.关于RAII的讨论可以参考前面的文章.在使 ...
随机推荐
- 菜单栏—View(视图)菜单
- bzoj 3529 数表
题目链接:http://www.lydsy.com/JudgeOnline/problem.php?id=3529 题目大意:令F(i)为i的约数和,多次询问对于1<=x<=n,1< ...
- 早期MyBatis开发与接口式Mybatis开发的简介
早期MyBatis开发与接口式Mybatis开发的简介 一.早期版本的myBatis使用 导jar包 1.配置mybatis.xml的配置文件 1) ...
- [2012-06-21]结合find的awk
源起:http://bbs.chinaunix.net/forum.php?mod=viewthread&tid=3754423&page=1&extra=#pid221729 ...
- 好用的sql
@ 复制表结构 ; --复制表结构和数据 create table table_name_new as select * from <table_name> @ 查看表信息 select ...
- java匿名内部类举例
public class Test { public static void main(String[] args) { //4.匿名内部类 //主要是针对那些不能直接创建对象的抽象类和接口而来的 S ...
- H - transaction transaction transaction
https://vjudge.net/contest/184514#problem/H 题意: 一个商人为了赚钱,在城市之间倒卖商品.有n个城市,每个城市之间有且只有一条无向边连通.给出n个城市的货物 ...
- [ASP.NET MVC] Razor 布局
整体视图模板 View模板会先找到对应的controller文件,再找此文件下的Shared文件夹. 比如项目最外层的View/Shared 目录下有一个_Layout.cshtml模板页,有这样代码 ...
- MySQL的JOIN(四):JOIN优化实践之快速匹配
这篇博文讲述如何优化扫描速度.我们通过MySQL的JOIN(二):JOIN原理得知了两张表的JOIN操作就是不断从驱动表中取出记录,然后查找出被驱动表中与之匹配的记录并连接.这个过程的实质就是查询操作 ...
- xmanager无法弹出图形化界面。