高精地图技术专栏 | 基于空间连续性的异常3D点云修复技术
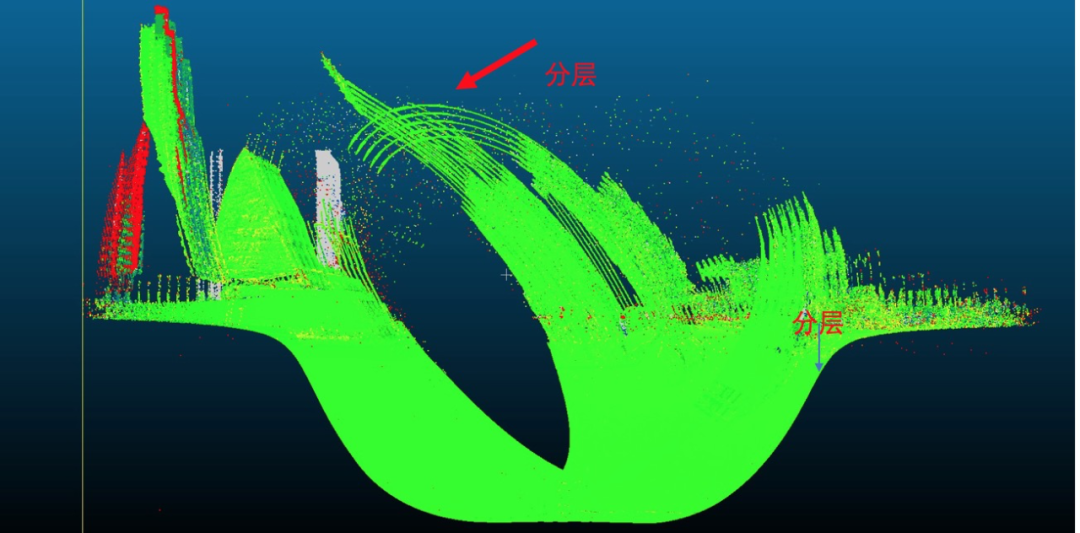
1.背景
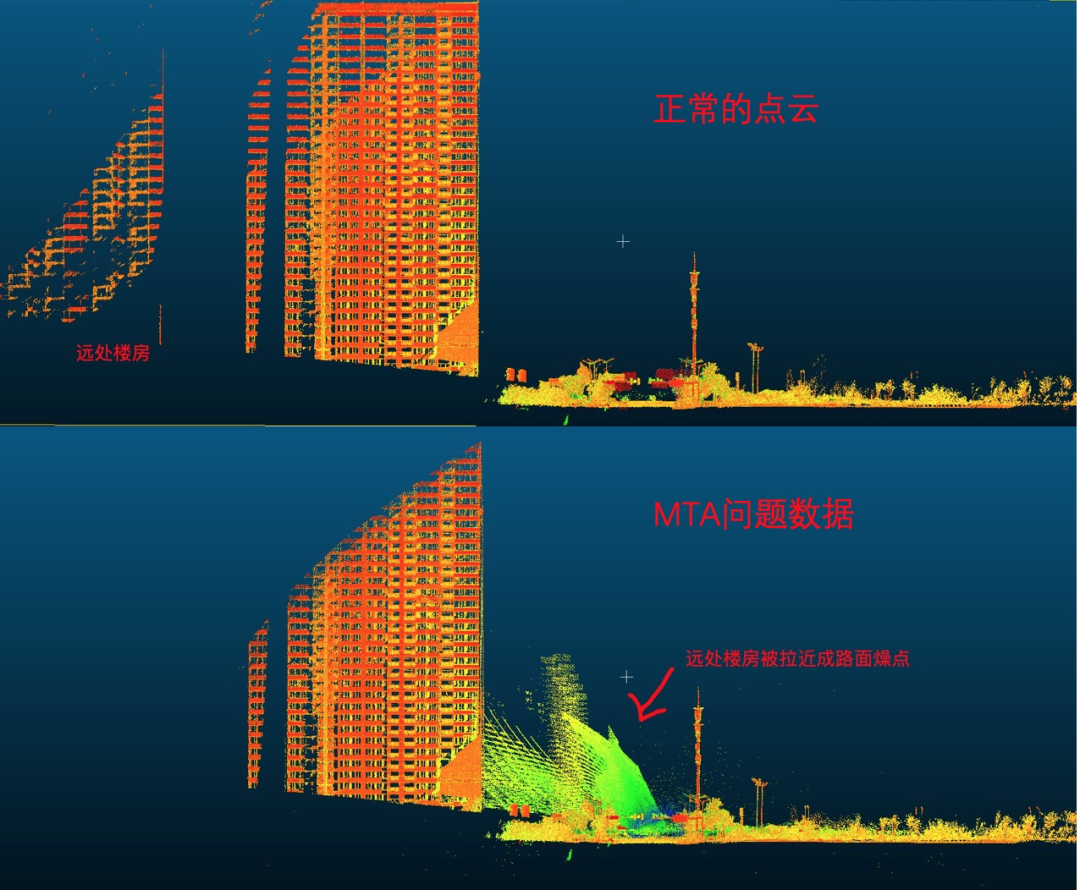
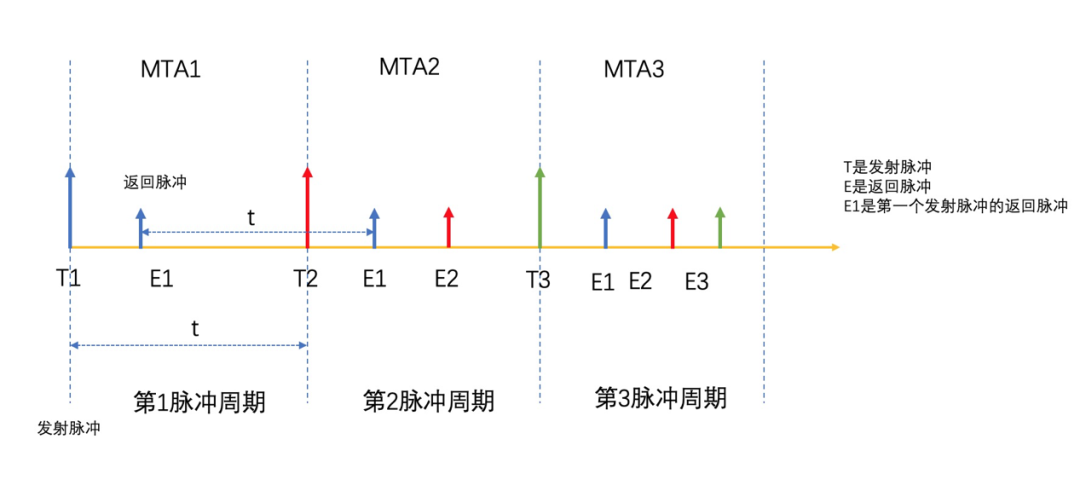
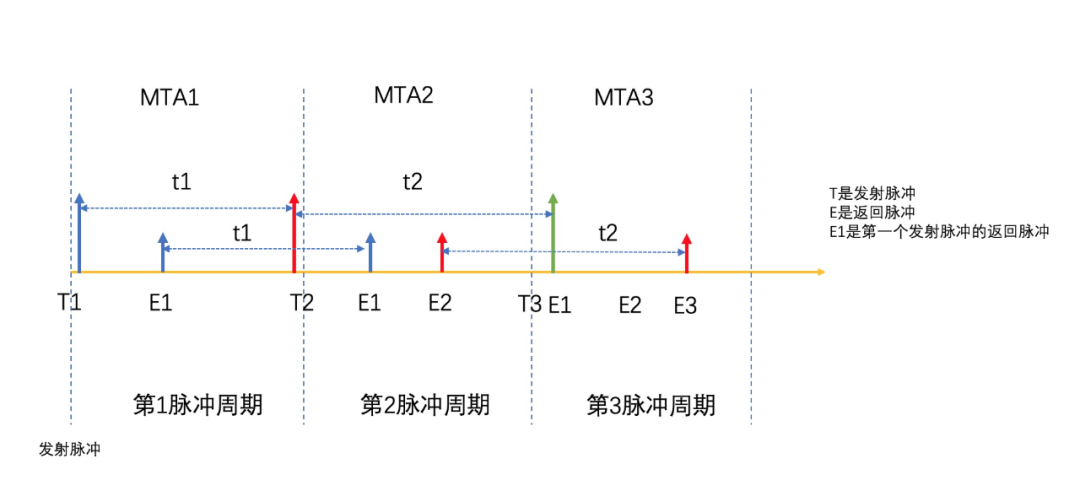
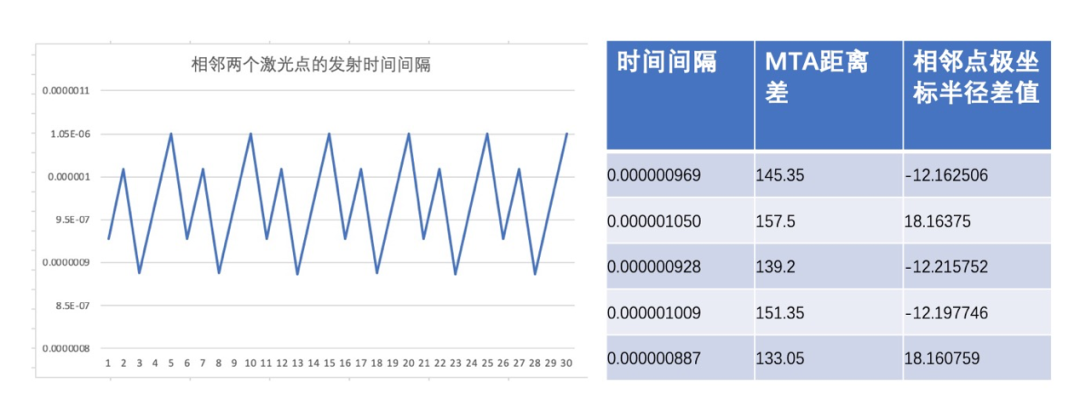
2.MTA原理


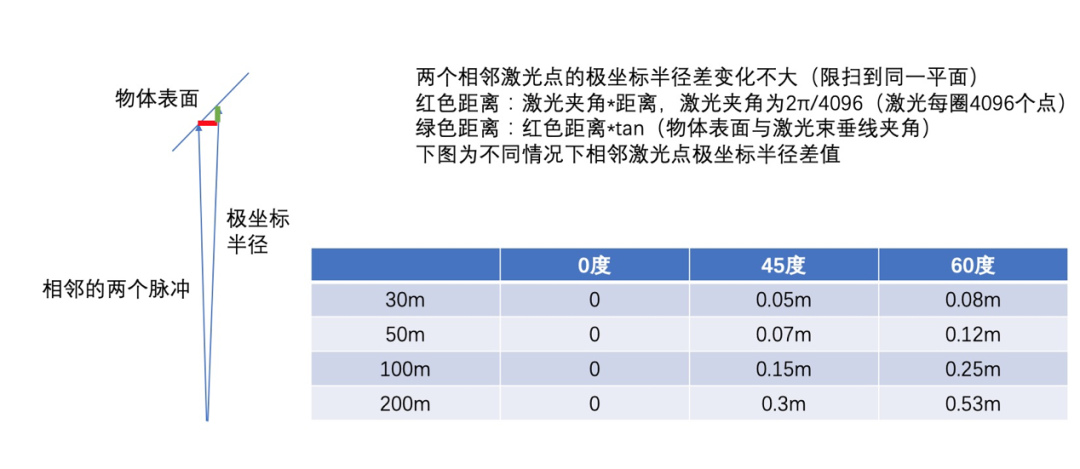
3.激光应对MTA的内部机制
4.MTA修正算法
- 数据分圈:以一个圆周(线)为基本处理单元;
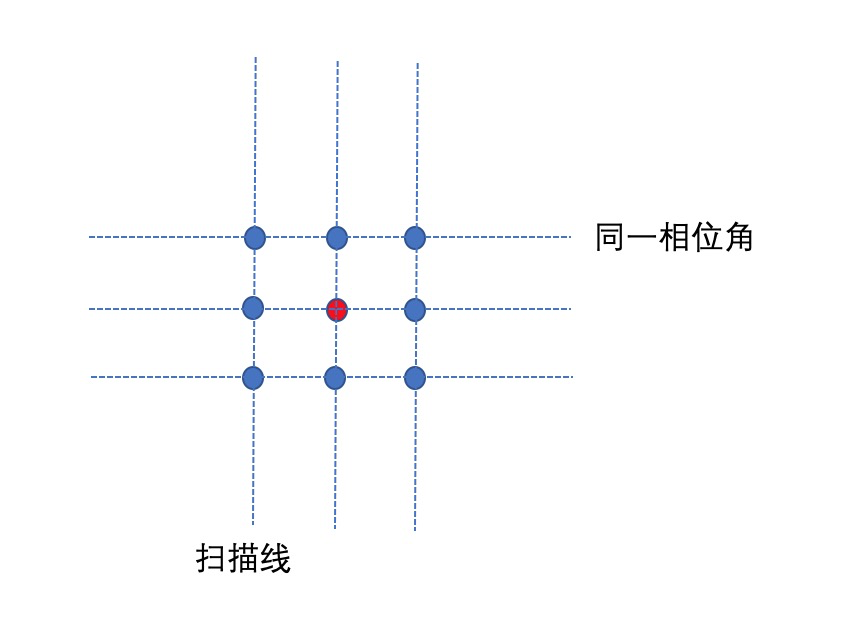
- 连续性计算区域:对于某个点,取其当前圈的邻近点以及前后相邻两圈的邻近点作为连续性计算区域,如图7;
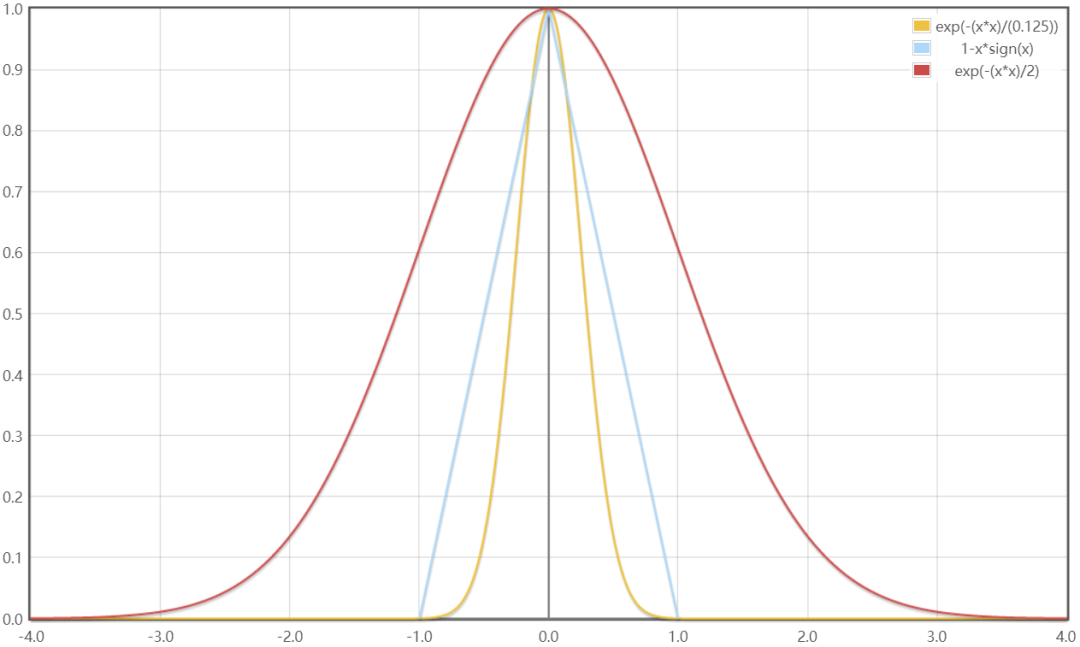
- 对每个点计算其测距连续性权值以及反射率连续性权值,即与方差成反比例然后得出MTA区域。
- 对每个点,分别获取其作为MTA1与MTA2的测量数据,主要为测距值、反射率;
- 对每个点,分别获取其MTA1与MTA2邻居点集合;
- 计算每个点的每个邻居的测距权值和反射率权值,然后求和,最终根据权值大小确定MTA区域。
- 探测距离最大 235m(80%高反射率);
- 低反射率物体不到 100m;
- 针叶林 100m;
- 柏油沥青 120m;
- 阔叶林 150m;
- 建筑砖头 200m左右;
- 白色灰泥 250m。
- 考虑到发生MTA错误都发生在地面以上,即激光实际能扫描到的很远的物体都在地面以上,可先根据车高信息剔除地面附近点;
- 对于多次回波,点的连续性只取第一次回波来计算;
- 分圈后按扫描角和测距值判断空间相邻;
- 分圈处理,多线程并行加速;
- 对于不同区域的连续性都很差的点作为孤立点进行剔除。
5.总结与展望
关于高精地图业务中心

高精地图技术专栏 | 基于空间连续性的异常3D点云修复技术的更多相关文章
- zz高精地图和定位在自动驾驶的应用
本次分享聚焦于高精地图在自动驾驶中的应用,主要分为以下两部分: 1. 高精地图 High Definition Map 拓扑地图 Topological Map / Road Graph 3D栅格地图 ...
- WEB 三维引擎在高精地图数据生产的探索和实践
1. 前言 高精地图(High Definition Map)作为自动驾驶安全性不可或缺的一部分,能有效强化自动驾驶的感知能力和决策能力,提升自动驾驶的等级.对于自动驾驶来说,高精地图主要是给机器用的 ...
- 2020云栖大会智慧出行专场:聚焦高精地图/算法、智能模型、自动驾驶、AR导航
2020云栖大会将于9月17日-18日在线举行,届时将通过官网为全球科技人带来前沿科技.技术产品.产业应用等领域的系列重要分享. 阿里巴巴高德地图携手合作伙伴精心筹备了“智慧出行”专场.我们将为大 ...
- 无人驾驶—高精地图和V2X
高精地图将厘米级的静态信息传传递给无人车V2X将路况上的动态信息传递给无人车 高精地图的作用 高精地图与传统地图的对比 高精地图与定位的关系 上图左侧是感知到的区域,右侧是高精地图,之后进行拼接获得车 ...
- qml 绘制高精地图之怀疑人生的加载速度
绘制高精地图时需要gps的经纬度坐标,之前的实现方式是QGeocoordinate类的经纬度变量通过json的方式在qml中使用. 以画线为例,使用方式是这样哒. for(var i in vehic ...
- 【Apollo自动驾驶源码解读】车道线的感知和高精地图融合
模式选择 在modules/map/relative_map/conf/relative_map_config.pb.txt文件中对模式进行修改: lane_source: OFFLINE_GENER ...
- 语义slam用于高精地图和高精定位的一些想法
最近一直在考虑语义slam在自动驾驶和辅助驾驶中的用法,研究了一下视觉为主的高精度地图+高精定位的模式,特别是mobileye的REM. 秉承先建图再定位的思路,在服务器端(云端)建图,在车端定位. ...
- 全面了解Android热修复技术
WeTest 导读 本文探讨了Android热修复技术的发展脉络,现状及其未来. 热修复技术概述 热修复技术在近年来飞速发展,尤其是在InstantRun方案推出之后,各种热修复技术竞相涌现.国内大部 ...
- 3D动态人脸识别技术分析——世纪晟人脸识别实现三维人脸建模
- 目录 - 国内3D动态人脸识别现状概况 - 新形势下人脸识别技术发展潜力 - 基于深度学习的3D动态人脸识别技术分析 1. 非线性数据建模方法 2. 基于3D变形模型的人脸建模 - 案例结合——世 ...
随机推荐
- Invalid prop: custom validator check failed for prop "***"
使用element ui时,绑定参数参考官方参数说明,比如progress的status 值必须是在以下三个里面选择 "success/exception/text", 其它情况可 ...
- chrome禁用缓存:调试javascript注意事项
chrome禁用缓存:调试javascript chrome对js和图片的缓存,导致调试的程序不是最新的,有时F5刷新了都没用. 可以禁用缓存: 先按F12,再按F1, 勾选 Disable ca ...
- Makefile 赋值 函数定义 等小知识点
1.赋值 == 到用的时候实际才去赋值:= 立刻赋值?= 未赋值才赋值+= 2.多层变量 多层变量引用(各种复杂组合...)a =bb= cc= dd =1$($($($(a)))) 最终等于1 3. ...
- translate.js
http://www.openxrest.com/translatejs/index.html translate.js translate.js is a jQuery plugin to tran ...
- c++ 遍历当前程序的线程
#include <iostream> #include <Windows.h> #include <Psapi.h> #include <TlHelp32. ...
- 《容器高手实战: Dockerfile最佳实践》
Dockerfile最佳实践一个容器对应一个进程一个Docker容器应该只对应一个进程,也就是一个Docker 镜像一般只包含一个应用的制品包(比如.jar). 在需要组合多个进程的场景,使用容器组( ...
- emplace_back与push_back
资料参考: https://blog.csdn.net/p942005405/article/details/84764104 实际精华在评论中,转载如下: STL的实现版本很多,VS.GCC版本不同 ...
- git设置、查看、取消代理
设置代理: git config --global http.proxy 'socks5://127.0.0.1:1080' git config --global https.proxy 'sock ...
- C++算法代码——关于马的问题
题目来自:http://218.5.5.242:9018/JudgeOnline/problem.php?id=1285 题目描述 小R参加一个派对,这个派队的参加者需要带上四匹颜色不同的马.小R目前 ...
- 自定义Edit 样式 简便写法
1 <?xml version="1.0" encoding="utf-8"?> 2 <selector xmlns:android=&quo ...