『MXNet』第十弹_物体检测SSD
一、辅助API介绍
mxnet.image.ImageDetIter
图像检测迭代器,
from mxnet import image
from mxnet import nd data_shape = 256
batch_size = 32
rgb_mean = nd.array([123, 117, 104]) def get_iterators(data_shape, batch_size):
"""256, 32"""
class_names = ['pikachu']
num_class = len(class_names)
train_iter = image.ImageDetIter(
batch_size=batch_size,
data_shape=(3, data_shape, data_shape),
path_imgrec=data_dir+'train.rec',
path_imgidx=data_dir+'train.idx',
shuffle=True,
mean=True,
rand_crop=1,
min_object_covered=0.95,
max_attempts=200)
val_iter = image.ImageDetIter(
batch_size=batch_size,
data_shape=(3, data_shape, data_shape),
path_imgrec=data_dir+'val.rec',
shuffle=False,
mean=True)
return train_iter, val_iter, class_names, num_class train_data, test_data, class_names, num_class = get_iterators(
data_shape, batch_size) batch = train_data.next()
# (32, 1, 5)
# 1:图像中只有一个目标
# 5:第一个元素对应物体的标号,-1表示非法物体;后面4个元素表示边框,0~1
# 多个目标时list[nd(batch_size, 目标数目, 目标信息)]
print(batch)
# list[nd(batch_size,channel,width,higth)]
print(batch.data[0].shape)
print(batch.label[0].shape)
DataBatch: data shapes: [(32, 3, 256, 256)] label shapes: [(32, 1, 5)]
(32, 3, 256, 256)
(32, 1, 5)
可以看到标号的形状是batch_size x num_object_per_image x 5。这里数据里每个图片里面只有一个标号。每个标号由长为5的数组表示,第一个元素是其对用物体的标号,其中-1表示非法物体,仅做填充使用。后面4个元素表示边框。
mxnet.metric
from mxnet import metric cls_metric = metric.Accuracy()
box_metric = metric.MAE() cls_metric.update([cls_target], [class_preds.transpose((0,2,1))])
box_metric.update([box_target], [box_preds * box_mask])
cls_metric.get()
box_metric.get()
gluon.loss.Loss
用法类似Block,被继承用来定义新的损失函数,值得注意的是这里体现了F的用法:代替mx.nd or mx.sym
class FocalLoss(gluon.loss.Loss):
def __init__(self, axis=-1, alpha=0.25, gamma=2, batch_axis=0, **kwargs):
super(FocalLoss, self).__init__(None, batch_axis, **kwargs)
self._axis = axis
self._alpha = alpha
self._gamma = gamma def hybrid_forward(self, F, output, label):
# (32, 5444, 2) (32, 5444)
# Here `F` can be either mx.nd or mx.sym
# 这里使用F取代在forward中显式的指定两者,方便使用
# 所以非hybrid无此参数
output = F.softmax(output)
pj = output.pick(label, axis=self._axis, keepdims=True)
# print(pj.shape) (32, 5444, 1):仅仅保留正确类别对应的概率
# print(self._axis) -1
loss = - self._alpha * ((1 - pj) ** self._gamma) * pj.log()
return loss.mean(axis=self._batch_axis, exclude=True)
pick:根据label最后一维的值选取output的-2维上的元素
二、框体处理系列函数
框体生成:mxnet.contrib.ndarray.MultiBoxPrior
因为边框可以出现在图片中的任何位置,并且可以有任意大小。为了简化计算,SSD跟Faster R-CNN一样使用一些默认的边界框,或者称之为锚框(anchor box),做为搜索起点。具体来说,对输入的每个像素,以其为中心采样数个有不同形状和不同比例的边界框。假设输入大小是 w×hw×h,
- 给定大小 s∈(0,1]s∈(0,1],那么生成的边界框形状是

- 给定比例 r>0r>0,那么生成的边界框形状是
在采样的时候我们提供 n 个大小(sizes)和 m 个比例(ratios)。为了计算简单这里不生成nm个锚框,而是n+m−1个。其中第 i 个锚框使用
sizes[i]和ratios[0]如果 i≤nsizes[0]和ratios[i-n]如果 i>n
我们可以使用contribe.ndarray里的MultiBoxPrior来采样锚框。这里锚框通过左下角和右上角两个点来确定,而且被标准化成了区间[0,1][0,1]的实数。
from mxnet import nd
from mxnet.contrib.ndarray import MultiBoxPrior # shape: batch x channel x height x weight
n = 40
x = nd.random.uniform(shape=(1, 3, n, n)) y = MultiBoxPrior(x, sizes=[.5,.25,.1], ratios=[1,2,.5])
# 每个像素点(n*n),5个框,4个坐标值
boxes = y.reshape((n, n, -1, 4))
print(boxes.shape)
# The first anchor box centered on (20, 20)
# its format is (x_min, y_min, x_max, y_max)
boxes[20, 20, :, :]
(40, 40, 5, 4)Out[5]:[[ 0.26249999 0.26249999 0.76249999 0.76249999]
[ 0.38749999 0.38749999 0.63749999 0.63749999]
[ 0.46249998 0.46249998 0.5625 0.5625 ]
[ 0.1589466 0.33572328 0.86605334 0.6892767 ]
[ 0.33572328 0.1589466 0.6892767 0.86605334]]
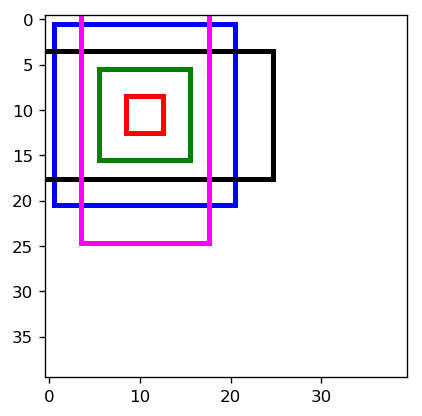
<NDArray 5x4 @cpu(0)>我们可以画出以(20,20)为中心的所有锚框:
colors = ['blue', 'green', 'red', 'black', 'magenta'] # 白板背景
plt.imshow(nd.ones((n, n, 3)).asnumpy())
# 提取某个像素点的框子
anchors = boxes[10, 10, :, :]
for i in range(anchors.shape[0]):
plt.gca().add_patch(box_to_rect(anchors[i,:]*n, colors[i]))
plt.show()
# 可以看到,贴边框子会被截断
框体筛选:mxnet.contrib.ndarray.MultiBoxTarget
虽然每张图片里面通常只有几个标注的边框,但SSD会生成大量的锚框。可以想象很多锚框都不会框住感兴趣的物体,就是说跟任何对应感兴趣物体的表框的IoU都小于某个阈值。这样就会产生大量的负类锚框,或者说对应标号为0的锚框。对于这类锚框有两点要考虑的:
- 边框预测的损失函数不应该包括负类锚框,因为它们并没有对应的真实边框
- 因为负类锚框数目可能远多于其他,我们可以只保留其中的一些。而且是保留那些目前预测最不确信它是负类的,就是对类0预测值排序,选取数值最小的哪一些困难的负类锚框。
我们可以使用MultiBoxTarget来完成上面这两个操作。
def training_targets(anchors, class_preds, labels):
"""
得到的全部边框坐标
得到的全部边框各个类别得分
真实类别及对应边框坐标
"""
class_preds = class_preds.transpose(axes=(0,2,1))
return MultiBoxTarget(anchors, labels, class_preds) # Output achors: (1, 5444, 4),1张图共5444个框4个坐标值
# Output class predictions: (1, 5444, 3),1张图5444个框3个类别(2分类+背景)
# batch.label: (1, 1, 5),1张图1个对象(1具体类别+4坐标)
out = training_targets(anchors, class_preds, batch.label[0][0:1])
[[ 0. 0. 0. ..., 0. 0. 0.]]
它返回三个NDArray,分别是
- 预测的边框跟真实边框的偏移,大小是
batch_size x (num_anchors*4) - 用来遮掩不需要的负类锚框的掩码,大小跟上面一致
- 锚框的真实的标号,大小是
batch_size x num_anchors
我们可以计算这次只选中了多少个锚框进入损失函数:
out[1].sum()/4
[ 14.]
<NDArray 1 @cpu(0)>
这里不太直观,我们看看网络中调用:
box_target, box_mask, cls_target = training_targets(
anchors, class_preds, y)
# IN:
# anchors(1, 5444, 4): 1, 框子数, 坐标数
# 各个框体原本坐标
# class_preds(32, 5444, 2):batch,框子数,类别数 cls_loss
# 各个框体分类信息
# y(32, 3, 5):batch,对象数,对象信息(类别+坐标)
# 真实标签
# OUT:
# box_target(32, 21776):batch,框子数*坐标数 box_loss
# 每个坐标框相较于真实框的偏移,作为被学习标签
# box_mask(32, 21776) :batch,框子数*坐标数 box_loss
# 每一个框每一个坐标是否保留(是1否0)
# cls_target(32, 5444):batch,框子数 cls_loss
# 每一个框对应的真实类别序号(背景0)
实际上anchors(即mxnet.contrib.ndarray.MultiBoxTarget于各个回归层生成)是固定不变的,我们使用每一个框子anchors、该框对应的的预测值class_preds、真实框标签得到:
- 每一个框体坐标偏移,经过了阈值检查的,默认overlap_threshold=0.5(值约小阈值越高)
- 这些框体的掩码(就是上面向量非零值替换为1,预测基本不会没有偏差)
- 每一个框子对应的类别,和上面非0输出数目保持一致
非极大值抑制:mxnet.contrib.ndarray.MultiBoxDetection
因为我们对每个像素都会生成数个锚框,这样我们可能会预测出大量相似的表框,从而导致结果非常嘈杂。一个办法是对于IoU比较高的两个表框,我们只保留预测执行度比较高的那个。这个算法(称之为non maximum suppression)在MultiBoxDetection里实现,
from mxnet.contrib.ndarray import MultiBoxDetection def predict(x):
anchors, cls_preds, box_preds = net(x.as_in_context(ctx))
# anchors.shape, class_preds.shape, box_preds.shape
# (1, 5444, 4) (32, 5444, 2) (32, 21776) box_loss
cls_probs = nd.SoftmaxActivation(
cls_preds.transpose((0,2,1)), mode='channel') return MultiBoxDetection(cls_probs, box_preds, anchors,
force_suppress=True, clip=False)
可以看到,函数接收各个框体分类信息,各个框体回归(修正)信息,各个框体原本坐标,
对应的它输出所有边框,每个边框由[class_id, confidence, xmin, ymin, xmax, ymax]表示。其中class_id=-1表示要么这个边框被预测只含有背景,或者被去重掉了:
x, im = process_image('../img/pikachu.jpg')
out = predict(x)
out.shape
(1, 5444, 6)
三、网络主干
def class_predictor(num_anchors, num_classes):
"""return a layer to predict classes"""
# 输入输出大小相同,输出的不同通道对应(不同框)的(不同类别)的得分
# 输出图片每一个像素点上通道数:框体数目×(类别数 + 1,背景)
return nn.Conv2D(num_anchors * (num_classes + 1), 3, padding=1) def box_predictor(num_anchors):
"""return a layer to predict delta locations"""
return nn.Conv2D(num_anchors * 4, 3, padding=1) def down_sample(num_filters):
"""
定义一个卷积块,它将输入特征的长宽减半,以此来获取多尺度的预测。它由两个Conv-BatchNorm-Relu
组成,我们使用填充为1的3×33×3卷积使得输入和输入有同样的长宽,然后再通过跨度为2的最大池化层将长
宽减半。
"""
out = nn.HybridSequential()
for _ in range(2):
out.add(nn.Conv2D(num_filters, 3, strides=1, padding=1))
out.add(nn.BatchNorm(in_channels=num_filters))
out.add(nn.Activation('relu'))
out.add(nn.MaxPool2D(2))
return out def flatten_prediction(pred):
# 图片数,像素数×框数×分类数:值为得分
return pred.transpose(axes=(0,2,3,1)).flatten() def concat_predictions(preds):
# 图片数,(全部层的)像素数×框数×分类数:值为得分
return nd.concat(*preds, dim=1) def body():
"""
主体网络用来从原始像素抽取特征。通常前面介绍的用来图片分类的卷积神经网络,例如ResNet,
都可以用来作为主体网络。这里为了示范,我们简单叠加几个减半模块作为主体网络。
"""
out = nn.HybridSequential()
for nfilters in [16, 32, 64]:
out.add(down_sample(nfilters))
return out def toy_ssd_model(num_anchors, num_classes):
"""
创建一个玩具SSD模型了。我们称之为玩具是因为这个网络不管是层数还是锚框个数都比较小,
仅仅适合之后我们之后使用的一个小数据集。但这个模型不会影响我们介绍SSD。
这个网络包含四块。主体网络,三个减半模块,以及五个物体类别和边框预测模块。其中预测分
别应用在在主体网络输出,减半模块输出,和最后的全局池化层上。
"""
# 含三个减半模块
downsamplers = nn.Sequential()
for _ in range(3):
downsamplers.add(down_sample(128))
# 含五个分类预测模块
class_predictors = nn.Sequential()
# 含五个边框回归模块
box_predictors = nn.Sequential()
for _ in range(5):
class_predictors.add(class_predictor(num_anchors, num_classes))
box_predictors.add(box_predictor(num_anchors)) # 主体网络 + 减半 + 分类 + 回归
model = nn.Sequential()
model.add(body(), downsamplers, class_predictors, box_predictors)
return model def toy_ssd_forward(x, model, sizes, ratios, verbose=False):
"""
给定模型和每层预测输出使用的锚框大小和形状,我们可以定义前向函数
"""
body, downsamplers, class_predictors, box_predictors = model
anchors, class_preds, box_preds = [], [], []
# feature extraction
# 流过body主体网络
x = body(x)
# 循环式分类回归网络
for i in range(5):
# 逐像素生成第i型网络
anchors.append(MultiBoxPrior(
x, sizes=sizes[i], ratios=ratios[i]))
# 逐像素分类i型网络,结果拉伸后收集
class_preds.append(
flatten_prediction(class_predictors[i](x)))
# 逐像素回归i型网络,结果拉伸后收集
box_preds.append(
flatten_prediction(box_predictors[i](x)))
# 状态报告
if verbose:
print('Predict scale', i, x.shape, 'with',
anchors[-1].shape[1], 'anchors')
# 下采样
if i < 3:
x = downsamplers[i](x)
elif i == 3:
x = nd.Pooling(
x, global_pool=True, pool_type='max',
kernel=(x.shape[2], x.shape[3]))
# concat data
# 图片数目,后续长向量
return (concat_predictions(anchors),
concat_predictions(class_preds),
concat_predictions(box_preds)) from mxnet import gluon
# 完整的模型
class ToySSD(gluon.Block):
def __init__(self, num_classes, verbose=False, **kwargs):
super(ToySSD, self).__init__(**kwargs)
# anchor box sizes and ratios for 5 feature scales
self.sizes = [[.2,.272], [.37,.447], [.54,.619],
[.71,.79], [.88,.961]]
self.ratios = [[1,2,.5]]*5
self.num_classes = num_classes
self.verbose = verbose
num_anchors = len(self.sizes[0]) + len(self.ratios[0]) - 1
# use name_scope to guard the names
with self.name_scope():
self.model = toy_ssd_model(num_anchors, num_classes) def forward(self, x):
anchors, class_preds, box_preds = toy_ssd_forward(
x, self.model, self.sizes, self.ratios,
verbose=self.verbose)
# it is better to have class predictions reshaped for softmax computation
# 图片数,像素数×类别数×框数 -> 图片数,像素数×框数(总框数),类别数
class_preds = class_preds.reshape(shape=(0, -1, self.num_classes+1))
return anchors, class_preds, box_preds
训练逻辑并不复杂,理解了前两个函数就知道了大概,不过特别说明,我们会生成很多框体,回归层输出的4个值实际上就是对于框体修正值的预测。其他详见github上的全流程说明。
『MXNet』第十弹_物体检测SSD的更多相关文章
- 『PyTorch』第十弹_循环神经网络
RNN基础: 『cs231n』作业3问题1选讲_通过代码理解RNN&图像标注训练 TensorFlow RNN: 『TensotFlow』基础RNN网络分类问题 『TensotFlow』基础R ...
- 『MXNet』第八弹_数据处理API_下_Image IO专题
想学习MXNet的同学建议看一看这位博主的博客,受益良多. 在本节中,我们将学习如何在MXNet中预处理和加载图像数据. 在MXNet中加载图像数据有4种方式. 使用 mx.image.imdecod ...
- 『TensorFlow』第十弹_队列&多线程_道路多坎坷
一.基本队列: 队列有两个基本操作,对应在tf中就是enqueue&dequeue tf.FIFOQueue(2,'int32') import tensorflow as tf '''FIF ...
- 『MXNet』第十一弹_符号式编程初探
一.符号分类 符号对我们想要进行的计算进行了描述, 下图展示了符号如何对计算进行描述. 我们定义了符号变量A, 符号变量B, 生成了符号变量C, 其中, A, B为参数节点, C为内部节点! mxne ...
- 『MXNet』第八弹_数据处理API_上
一.Gluon数据加载 下面的两个dataset处理类一般会成对出现,两个都可做预处理,但是由于后面还可能用到原始图片,.ImageFolderDataset不加预处理的话可以满足,所以建议在.Dat ...
- 『MXNet』第七弹_多GPU并行程序设计
资料原文 一.概述思路 假设一台机器上有个GPU.给定需要训练的模型,每个GPU将分别独立维护一份完整的模型参数. 在模型训练的任意一次迭代中,给定一个小批量,我们将该批量中的样本划分成份并分给每个G ...
- 『MXNet』第四弹_Gluon自定义层
一.不含参数层 通过继承Block自定义了一个将输入减掉均值的层:CenteredLayer类,并将层的计算放在forward函数里, from mxnet import nd, gluon from ...
- 『TensorFlow』第七弹_保存&载入会话_霸王回马
首更: 由于TensorFlow的奇怪形式,所以载入保存的是sess,把会话中当前激活的变量保存下来,所以必须保证(其他网络也要求这个)保存网络和载入网络的结构一致,且变量名称必须一致,这是caffe ...
- 『PyTorch』第四弹_通过LeNet初识pytorch神经网络_下
『PyTorch』第四弹_通过LeNet初识pytorch神经网络_上 # Author : Hellcat # Time : 2018/2/11 import torch as t import t ...
随机推荐
- SSM项目 单元测试中 注入bean 空指针异常
##特别 由于准备春招,所以希望各位看客方便的话,能去github上面帮我Star一下项目https://github.com/Draymonders/Campus-Shop java.lang.Nu ...
- P3239 [HNOI2015]亚瑟王
思路 神仙概率dp 由于期望的线性性质,能够想到最后要求的期望价值就是把每个卡牌发动的概率\(g_i\)乘上伤害\(val_i\)之后加到一起 然后怎么求\(g_i\)呢,肯定是要dp的 我想了例如d ...
- wamp phpcms部署网站问题
服务器使用自己的服务器,域名申请后通过信息服务iis管理器建网站,并将物理地址指定到wamp的www目录中的网站的根目录.这时候如果网站首页已经生成后访问域名将进入网站首页. 出现的问题: 1.导航( ...
- Java中substring函数的简单应用
1.删掉一个字符串中的某个字符 /* * 使用Java 中的 substring()函数删掉字符串中的某个字符 * deleteAssignChar函数的参数说明: * str:被操作的字符串 * o ...
- NLog——ElasticSearch——Kibana
Nlog.elasticsearch.Kibana以及logstash在项目中的应用(一) Nlog.elasticsearch.Kibana以及logstash在项目中的应用(二) ASP.NET ...
- CommandLineParser命令行解析类
目的:方便用户在命令行使用过程中减少工作量 以前版本没这个类时,如果要运行带参数的.exe,必须在命令行中输入文件路径以及各种参数,并且输入的参数格式要与代码中的if语句判断内容格式一样,一不小心就输 ...
- Codeforces Round #332 (Div. 2) D. Spongebob and Squares(枚举)
http://codeforces.com/problemset/problem/599/D 题意:给出一个数x,问你有多少个n*m的网格中有x个正方形,输出n和m的值. 思路: 易得公式为:$\su ...
- window7安装python的xgboost库方法
window7安装python的xgboost库方法 1.下载xgboost-master.zip文件,而不是xgboost-0.4a30.tar.gz,xgboost-0.4a30.tar.gz是更 ...
- bzoj 2243: [SDOI2011]染色 线段树区间合并+树链剖分
2243: [SDOI2011]染色 Time Limit: 20 Sec Memory Limit: 512 MBSubmit: 7925 Solved: 2975[Submit][Status ...
- .net unicode汉字互相转换
[两种方法].net unicode汉字互相转换 ========================================= //汉字转Unicode编码(ASCII) private str ...