二叉树之AVL树的平衡实现(递归与非递归)

这篇文章用来复习AVL的平衡操作,分别会介绍其旋转操作的递归与非递归实现,但是最终带有插入示例的版本会以递归呈现.
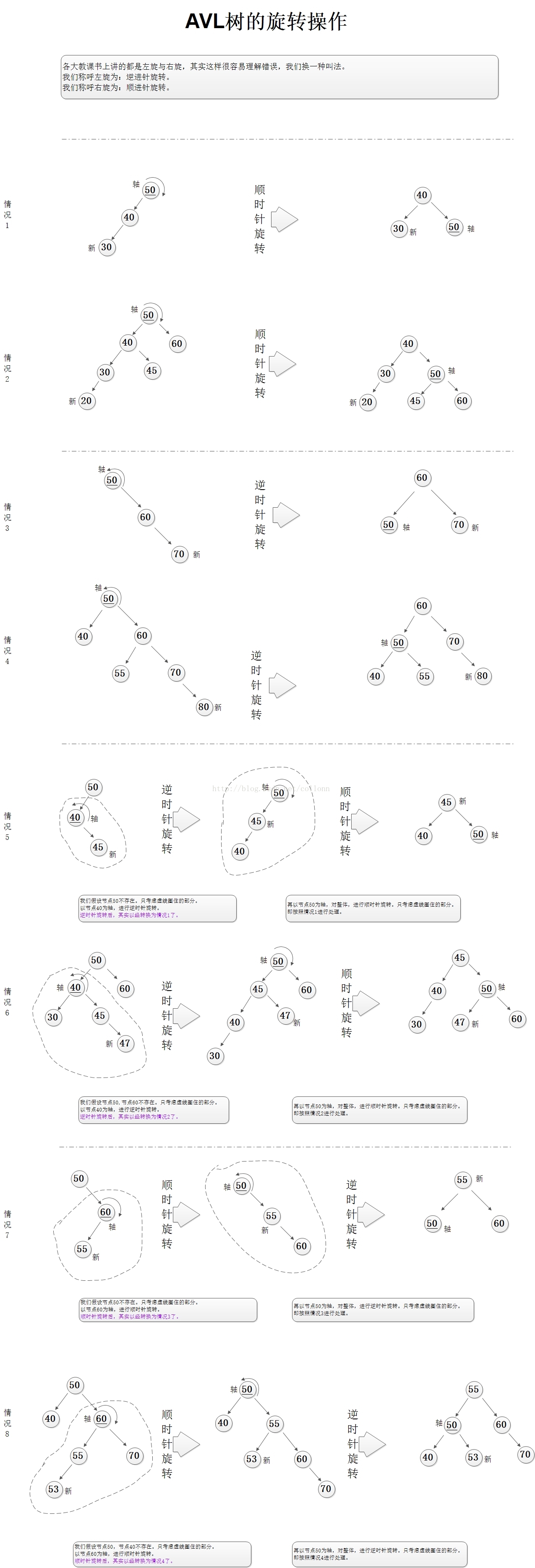
下面这张图绘制了需要旋转操作的8种情况.(我要给做这张图的兄弟一个赞)后面会给出这八种情况对应平衡实现.
[1]
情况1-2:
这种需要旋转的结构一般称之为LL型,需要右旋 (顺时针旋转).
我用一个图来抽象一下这两个情况,画的不好,我尽量表达吧.
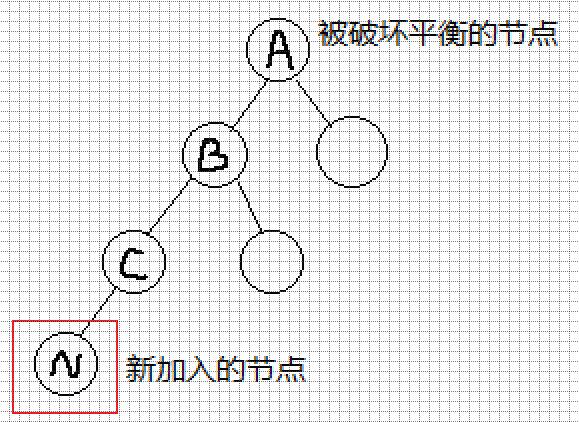
此时需要对A进行平衡操作,方法为:
- 将A的左子树换为B的右子树.
- B的右子树换为A.
- 非递归实现的代码为:
void rotate_right(AVLTree &A){
AVLTree leftChild = A->left;
A->left = leftChild->right;
leftChild->right = A;
// 别忘了让父节点建立平衡后的连接
A = leftChild;
}
非递归的操作在旋转前会充分考虑所有的旋转情况,目的是提早调整A下面各节点的高度.
之后再进行旋转操作,这一点与递归的不同,可见递归是平衡完后再进行的高度调整.
- 递归实现代码为:
Position CAVLTree::singleRotateWithLeft(Position _K){
Position K0;
K0 = _K->left;
_K->left = K0->right;
K0->right = _K;
_K->Height = max(getHeight(_K->left),getHeight(_K->right)) + ;
K0->Height = max(getHeight(K0->left),getHeight(K0->right)) + ;
// 返回新的节点以替换
return K0;
}
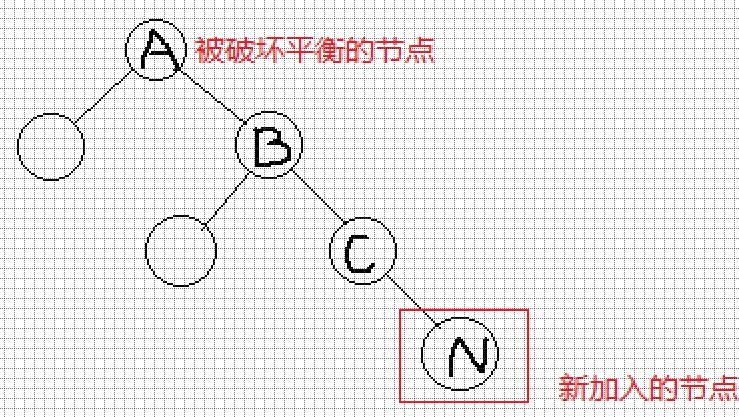
情况3-4:
这种需要旋转的结构一般称之为RR型,需要左旋(逆时针旋转).
需要对A进行平衡操作,方法为:
- 将A的右子树换为B的左子树;
- B的左子树换为A
- 非递归的实现为:
void rotate_left(AVLTree &A){
AVLTree rightChild = A->right;
A->right = rightChild ->left;
rightChild->left = A;
A = rightChild;
}
- 递归实现为:
Position CAVLTree::singleRotateWithRight(Position _K){
Position K0;
K0 = _K->right;
_K->right = K0->left;
K0->left = _K;
_K->Height = max(getHeight(_K->left),getHeight(_K->right)) + ;
K0->Height = max(getHeight(K0->left),getHeight(K0->right)) + ;
return K0;
}
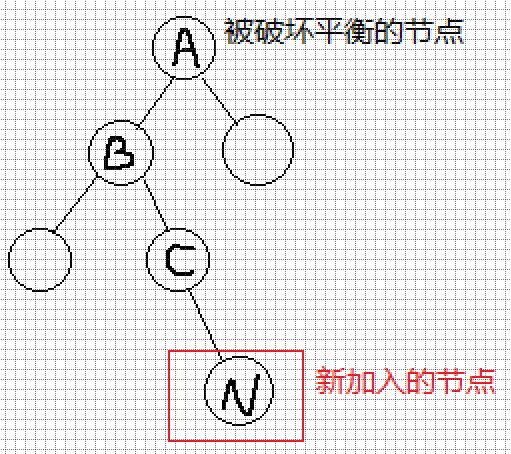
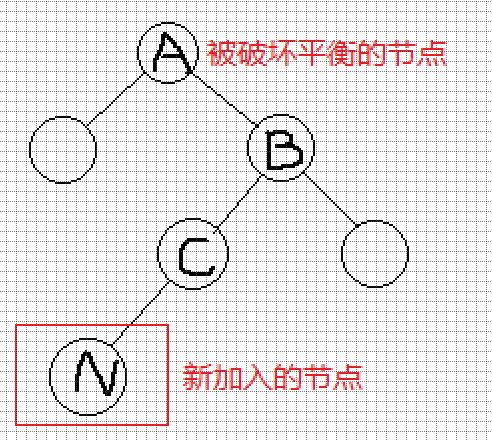
情况5-6:
这种需要旋转的结构一般称之为LR型,需要双旋转,即两次单旋.分别为左旋和右旋.
需要对A进行平衡操作,方法为:
- 对B(A->left)做左旋
- 对A做右旋
这个递归与非递归的方式都是一样的.
- 非递归:
rotate_left(A->left); rotate_right(A);
- 递归:
Position CAVLTree::doubleRotateWithLeft(Position _K){
_K->left = singleRotateWithRight(_K->left);
return singleRotateWithLeft(_K);
}
但是有没有一次性到位的方法呢?有的
我把非递归的两个函数展开:
发现最后一步都是确定与父节点的关系,并不是旋转中的具体过程,于是可以简化为这样:
AVLTree leftChild = A->left; AVLTree leftRightChild = leftChild->left; // 左旋 leftChild->right = leftRightChild->left; leftRightChild->left = leftChild; // 右旋 A->left = leftRightChild->right; leftChild->right = A;
情况7-8:
这种需要旋转的结构一般称之为RL型,需要双旋转,即两次单旋.分别为右旋和左旋.
需要对A进行平衡操作,方法为:
- 对B进行右旋
- 对A进行左旋
同样,递归与非递归版本是一样的.
- 非递归:
rotate_right(A->left); rotate_left(A);
- 递归:
Position CAVLTree::doubleRotateWithRight(Position _K){
_K->right = singleRotateWithLeft(_K->right);
return singleRotateWithRight(_K);
}
同样,也有一次性到位的方法:
AVLTree rightChild = A->right; AVLTree rightLeftChild = rightChild->left; // 右旋 rightChild->left = rightLeftChild->right; rightLeftChild->right = rightChild; // 左旋 A->right = rightLeftChild->left; rightLeftChild->left = A;
下面是实现部分:
0.结构声明[2]:
struct AvlNode;
typedef AvlNode * AvlTree;
typedef AvlNode * Position; typedef int ELEMENT; struct AvlNode
{
AvlNode():data(),left(nullptr),right(nullptr),Height(){}
ELEMENT data;
AvlTree left;
AvlTree right;
int Height;
};
1.类中提供的API
class CAVLTree
{
public:
CAVLTree(void); ~CAVLTree(void); size_t _insert_(ELEMENT &_data); int getTreeHeight(); void showThisTree(); private: size_t size; AvlTree AvlTreeRoot;
private: Position insert_specific(ELEMENT &_data,AvlTree &_T); void showThisTree_specific(AvlTree _T); int getTreeHeight_specific(AvlTree _T); int max(int _a,int _b); int getHeight(Position _K); // 对于左左的分支,采用右旋
Position singleRotateWithLeft(Position _K); //对于右右的分支,采用左旋
Position singleRotateWithRight(Position _K); // 对于左右的分支,采用先左旋后右旋
Position doubleRotateWithLeft(Position _K); // 对于右左的分支,采用先右旋后左旋
Position doubleRotateWithRight(Position _K);
};
2.获取高度:
因为在max()函数获取结束后需要+1,所以这里的目的是将叶节点的Height想办法为0.
int CAVLTree::getHeight(Position _K){
return (_K == nullptr )?-:_K->Height;
}
3.插入操作:
- 递归
通过回溯的方式找到插入的位置,先平衡后调整高度;
哈哈,有一个很有趣的细节为什么同时判断高度差一个是
if(getHeight(_T->left) - getHeight(_T->right) == 2)
而另一个是
if (getHeight(_T->right) - getHeight(_T->left) == 2)
因为这里已经知道了插入发生在哪边了,所以肯定是插入的那边会有破坏平衡的可能,不会造成尴尬的(小-大)的局面.
Position CAVLTree::insert_specific(ELEMENT &_data,AvlTree &_T){
if (!_T)
{
_T = new AvlNode;
_T->data = _data;
_T->Height = ;
size++;
}
else if(_data < _T->data)
{
_T->left = insert_specific(_data,_T->left);
if(getHeight(_T->left) - getHeight(_T->right) == )
{
// 根据新插入的节点所在位置来判断使用什么旋转
if(_data < _T->left->data)
{
// 需要右旋
_T = singleRotateWithLeft(_T);
}
else
{
// 需要先左旋后右旋
_T = doubleRotateWithLeft(_T);
}
}
}
else if (_data > _T->data)
{
_T->right = insert_specific(_data,_T->right);
if (getHeight(_T->right) - getHeight(_T->left) == )
{
if (_data > _T->right->data)
{
// 需要左旋
_T = singleRotateWithRight(_T);
}
else
{
// 需要先右旋再左旋
_T = doubleRotateWithRight(_T);
}
}
}
_T->Height = max(getHeight(_T->left) , getHeight(_T->right)) + ;
return _T;
}
- 非递归[3]:
可以发现,非递归的实现是先调整高度再平衡,但是要提前考虑所有情况.
考虑左子树的情况:
void leftBalance(AVLNode* &t)
{
AVLNode* lc = NULL;
AVLNode* rd = NULL;
lc = t->lchild;
switch(lc->bf)
{
case LH: //顺时针旋转(即右旋)
t->bf = EH;
lc->bf = EH;
R_Rotate(t);
break; case EH: //删除节点时会发生,插入不会发生
t->bf = LH;
lc->bf = RH;
R_Rotate(t);
break; case RH: //先左旋后右旋
rd = lc->rchild;
switch(rd->bf)
{
case LH:
t->bf = RH;
lc->bf = EH;
break;
case EH:
t->bf = EH;
lc->bf = EH;
break;
case RH:
t->bf = EH;
lc->bf = LH;
break;
}
rd->bf = EH;
L_Rotate(t->lchild);//不能写L_Rotate(lc);采用的是引用参数
R_Rotate(t);
break;
}
}
考虑右子树的情况:
void rightBalance(AVLNode* &t)
{
AVLNode* rc = NULL;
AVLNode *ld = NULL; rc = t->rchild;
switch(rc->bf)
{
case RH: //逆时针旋转(即左旋)
t->bf = EH;
rc->bf = EH;
L_Rotate(t);
break;
case EH: //删除节点时会发生,插入不会发生
t->bf = RH;
rc->bf = LH;
L_Rotate(t);
break;
case LH: //先右旋后左旋
ld = rc->lchild;
switch(ld->bf)
{
case LH:
t->bf = EH;
rc->bf = RH;
break;
case EH:
t->bf = EH;
rc->bf = EH;
break;
case RH:
t->bf = LH;
rc->bf = EH;
break;
}
ld->bf = EH;
R_Rotate(t->rchild);//不能写R_Rotate(rc);采用的是引用参数
L_Rotate(t);
break;
}
}
总结:
递归真是神奇啊,对子树的处理递归的很漂亮,代码量是一方面,代码逻辑的清晰性也是非递归程序鲜有的.
用这个来学习递归算法真是好工具,希望对于我后面复习图论有帮助.
这篇文章中所述的非递归程序我并没有实现,肯定有疏忽的地方,欢迎大家指正.
完整示例中还有一个showThisTree(),它可以打印出漂亮的平衡二叉树.

相关代码请见我的github
[1] AVL树的旋转操作 图解 最详细
[2] left 等价 leftChild,同理,right 也等价 rightChild.
[4] 参考教材 数据结构与算法分析:C语言描述(原书第2版)[美] MarkAllenWeiss 著
二叉树之AVL树的平衡实现(递归与非递归)的更多相关文章
- AVL树(平衡二叉查找树)
首先要说AVL树,我们就必须先说二叉查找树,先介绍二叉查找树的一些特性,然后我们再来说平衡树的一些特性,结合这些特性,然后来介绍AVL树. 一.二叉查找树 1.二叉树查找树的相关特征定义 二叉树查找树 ...
- 判断AVL树是否平衡
AVL树是高度的平衡二插搜索树,其左子树和右子树的高度之差不超过1(树中的左子树和右子树都是AVL树),维持这个高度之差就要控制它的平衡因子.那么判断一颗AVL树是否平衡就需要判断它的左子树和右子树高 ...
- python常用算法(5)——树,二叉树与AVL树
1,树 树是一种非常重要的非线性数据结构,直观的看,它是数据元素(在树中称为节点)按分支关系组织起来的结构,很像自然界中树那样.树结构在客观世界中广泛存在,如人类社会的族谱和各种社会组织机构都可用树形 ...
- 二叉树与AVL树
二叉树 什么是二叉树? 父节点至多只有两个子树的树形结构成为二叉树.如下图所示,图1不是二叉树,图2是一棵二叉树. 图1 普通的树 ...
- 二叉树,AVL树和红黑树
为了接下来能更好的学习TreeMap和TreeSet,讲解一下二叉树,AVL树和红黑树. 1. 二叉查找树 2. AVL树 2.1. 树旋转 2.1.1. 左旋和右旋 2.1.2. 左左,右右,左右, ...
- 5分钟了解二叉树之AVL树
转载请注明出处:https://www.cnblogs.com/morningli/p/16033733.html AVL树是带有平衡条件的二叉查找树,其每个节点的左子树和右子树的高度最多相差1.为了 ...
- 数据结构二叉树的递归与非递归遍历之java,javascript,php实现可编译(1)java
前一段时间,学习数据结构的各种算法,概念不难理解,只是被C++的指针给弄的犯糊涂,于是用java,web,javascript,分别去实现数据结构的各种算法. 二叉树的遍历,本分享只是以二叉树中的先序 ...
- C实现二叉树(模块化集成,遍历的递归与非递归实现)
C实现二叉树模块化集成 实验源码介绍(源代码的总体介绍):header.h : 头文件链栈,循环队列,二叉树的结构声明和相关函数的声明.LinkStack.c : 链栈的相关操作函数定义.Queue. ...
- 二叉树3种递归和非递归遍历(Java)
import java.util.Stack; //二叉树3种递归和非递归遍历(Java) public class Traverse { /******************一二进制树的定义*** ...
随机推荐
- Dell R410 broadcom网卡驱动更新失败
问题描述: 最近遇到一个Dell R410 broadcom网卡驱动更新失败的问题.从官网上下载的驱动在安装的过程中都会自己回滚回来,很是困惑. 尝试解决: Dell官网现在提供的驱动一般最少有两种格 ...
- Segment fault及LINUX core dump详解
源自:http://andyniu.iteye.com/blog/1965571 core dump的概念: A core dump is the recorded state of the work ...
- freemarker解析模板报错问题
在确定模板文件代码无误的情况下,导致报错的原因大概有以下原因: 模板文件编码改变了(比如eclipse中的项目部署到tomcat下,而忘记设置tomcat编码就会导致读取模板文件编码不正确,导致程序解 ...
- Filter实现全站违法关键词屏蔽
思路:客户端请求服务器数据,经过Filter过滤(请求放行,响应拦截),服务器向客户端返回数据时,在Filter中修改掉返回数据中违法的部分. 修改服务器的响应需要自定义一个HttpServletRe ...
- codeforces 439 E. Devu and Birthday Celebration 组合数学 容斥定理
题意: q个询问,每一个询问给出2个数sum,n 1 <= q <= 10^5, 1 <= n <= sum <= 10^5 对于每一个询问,求满足下列条件的数组的方案数 ...
- [MySQL] 常用SQL技巧--18.5
1.正则表达式使用 MySQl利用REGEXP命令,提供正则表达式功能. 例子:select 'abcdef' REGEXP '^a'; select 'efg' REGEXP '[^XYZ]'; 2 ...
- HDFS的运行原理(转)
简介 HDFS(Hadoop Distributed File System )Hadoop分布式文件系统.是根据google发表的论文翻版的.论文为GFS(Google File System)Go ...
- (转)zookeeper学习记录--附browser
转自:http://agapple.iteye.com/blog/1111377 背景 前段时间看了S4流计算引擎,里面使用到了zookeeper进行集群管理,所以也就花了点时间研究了下zookeep ...
- 程序进入 EXPORT App_Fault_ISR的原因及措施:
最近再UCOSIII+LPC1768上移植modbus,在定时器初始化部分竟然跑飞进入 EXPORT App_Fault_ISR,查资料.逛论坛.问大牛都没有解决,最后发现竟然是犹豫一个低级失误引起 ...
- invalid byte 1 of 1-byte UTF-8 sequence
这是一个很普通的问题 , 就是UTF-8的xml文件被默认为GBK或者其他编码的编辑器改了之后保存为其他编码了 , 解决方案网上有很多. 其实需要注意的就是不要为了图方便 , 随便就找了个编辑器改一下 ...