物体检测方法(1) - YOLO 详解
最近遇到一些卡证识别的检测问题,打算先把理论知识梳理一下,随后还会梳理一版代码注释。
以前的region+proposal来检测的框架,这一系列速度和精度不断提高,但是还是无法达到实时。存在的主要问题为:速度不够快,主要原因是proposal比较多,特征进行分类的时候,相同区域的特征计算多遍,所以BGR大神有了最新作品,YOLO,故名思议,就是解决Faster-RCNN中proposal重复look的问题。这一些列代表作有YOLO和SSD.首先介绍YOLO.
- 作者Joseph Redmon ∗ , Santosh Divvala ∗† , Ross Girshick ¶ , Ali Farhadi,文献[1]
- 优点,速度快(45fps,小模型快速版本为155fps),缺点,很明显对位置预测不够精确,对小物体效果不够理想。
- 做法,简单粗暴,网格划分为S*S个网格,对每个网格直接进行回归预测,最后NMS进行处理。
1. YOLO的核心思想
- YOLO的核心思想就是利用整张图作为网络的输入,直接在输出层回归bounding box的位置和bounding box所属的类别。
- 没记错的话faster RCNN中也直接用整张图作为输入,但是faster-RCNN整体还是采用了RCNN那种 proposal+classifier的思想,只不过是将提取proposal的步骤放在CNN中实现了。
2.YOLO的实现方法

- 将一幅图像分成SxS个网格(grid cell),如果某个object的中心 落在这个网格中,则这个网格就负责预测这个object。
- 每个网格要预测B个bounding box,每个bounding box除了要回归自身的位置之外,还要附带预测一个confidence值。 这个confidence代表了所预测的box中含有object的置信度和这个box预测的有多准两重信息,其值是这样计算的: 其中如果有object落在一个grid cell里,第一项取1,否则取0。 第二项是预测的bounding box和实际的groundtruth之间的IoU值。
- 每个bounding box要预测(x, y, w, h)和confidence共5个值,每个网格还要预测一个类别信息,记为C类。则SxS个网格,每个网格要预测B个bounding box还要预测C个categories。输出就是S x S x (5*B+C)的一个tensor。 注意:class信息是针对每个网格的,confidence信息是针对每个bounding box的。
- 举例说明:在PASCAL VOC中,图像输入为448x448,取S=7,B=2,一共有20个类别(C=20)。则输出就是7x7x30的一个tensor。 整个网络结构如下图所示:

- 在test的时候,每个网格预测的class信息和bounding box预测的confidence信息相乘,就得到每个bounding box的class-specific confidence score:

- 等式左边第一项就是每个网格预测的类别信息,第二三项就是每个bounding box预测的confidence。这个乘积即encode了预测的box属于某一类的概率,也有该box准确度的信息。
- 得到每个box的class-specific confidence score以后,设置阈值,滤掉得分低的boxes,对保留的boxes进行NMS处理,就得到最终的检测结果。
3.YOLO的实现细节
- 每个grid有30维,这30维中,8维是回归box的坐标,2维是box的confidence,还有20维是类别。 其中坐标的x,y用对应网格的offset归一化到0-1之间,w,h用图像的width和height归一化到0-1之间。
- 在实现中,最主要的就是怎么设计损失函数,让这个三个方面得到很好的平衡。作者简单粗暴的全部采用了sum-squared error loss来做这件事。 这种做法存在以下几个问题: 第一,8维的localization error和20维的classification error同等重要显然是不合理的; 第二,如果一个网格中没有object(一幅图中这种网格很多),那么就会将这些网格中的box的confidence push到0,相比于较少的有object的网格,这种做法是overpowering的,这会导致网络不稳定甚至发散。
- 解决办法:
- 更重视8维的坐标预测,给这些损失前面赋予更大的loss weight, 记为在pascal VOC训练中取5。
- 对没有object的box的confidence loss,赋予小的loss weight,记为在pascal VOC训练中取0.5。
- 有object的box的confidence loss和类别的loss的loss weight正常取1。
- 对不同大小的box预测中,相比于大box预测偏一点,小box预测偏一点肯定更不能被忍受的。而sum-square error loss中对同样的偏移loss是一样。 为了缓和这个问题,作者用了一个比较取巧的办法,就是将box的width和height取平方根代替原本的height和width。这个参考下面的图很容易理解,小box的横轴值较小

- [补充,个人觉得还有更好的选择,W,H归一化为相对变化,这样对不同大小的物体,w,同等对待],发生偏移时,反应到y轴上相比大box要大。
- 一个网格预测多个box,希望的是每个box predictor专门负责预测某个object。具体做法就是看当前预测的box与ground truth box中哪个IoU大,就负责哪个。这种做法称作box predictor的specialization。
- 最后整个的损失函数如下所示: 这个损失函数中:
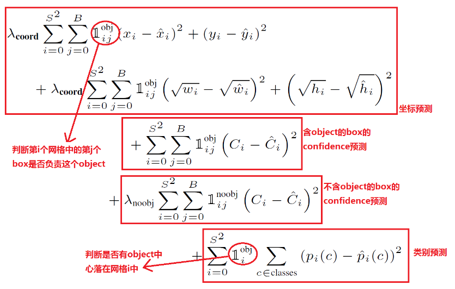
- 只有当某个网格中有object的时候才对classification error进行惩罚。
- 只有当某个box predictor对某个ground truth box负责的时候,才会对box的coordinate error进行惩罚,而对哪个ground truth box负责就看其预测值和ground truth box的IoU是不是在那个cell的所有box中最大。
- 其他细节,例如使用激活函数使用leak RELU,模型用ImageNet预训练等等,在这里就不一一赘述了。
4.YOLO的缺点
- YOLO对相互靠的很近的物体,还有很小的群体 检测效果不好,这是因为一个网格中只预测了两个框,并且只属于一类。
- 对测试图像中,同一类物体出现的新的不常见的长宽比和其他情况是。泛化能力偏弱。
- 由于损失函数的问题,定位误差是影响检测效果的主要原因。尤其是大小物体的处理上,还有待加强。
- 简介: 由于YOLO简单粗暴的将图像进行网格划分,然后对每个网格进行处理,这样导致定位不精确等一些列问题。而基于region proposal却又定位较精确的优点,那么SSD就结合了YOLO和anchor进行检测,结果也是比yolo提高很多【72%mAP】,速度58fps.
- 和faster的anchor不同之处在于,SSD在多个featureMap上进行处理,因为每一层featureMap的感受野不同。 faster是先提取proposal,然后在分类,而SSD值利用anchor直接进行分类和BBox回归。由于他是Yolo和anchor的结合,具体不再展开。
- 下面给出SSD和YOLO网络比较:
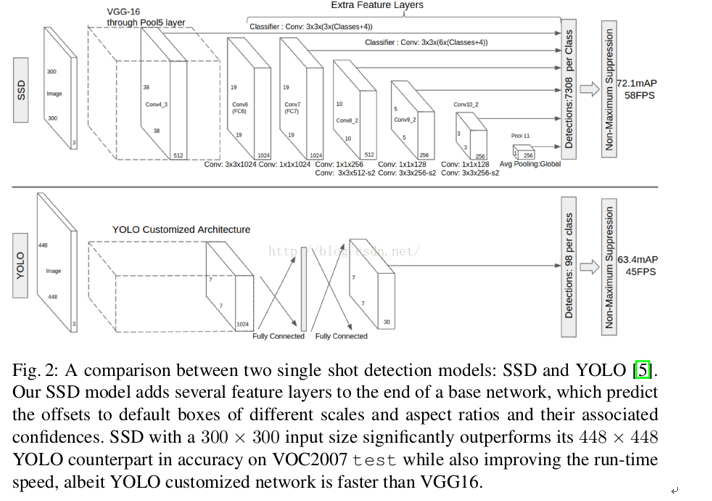
5.SSD,文献【2】
[1].You Only Look Once:Unified, Real-Time Object Detection
[2].SSD:Single Shot MultiBox Detector
物体检测方法(1) - YOLO 详解的更多相关文章
- 物体检测丨Faster R-CNN详解
这篇文章把Faster R-CNN的原理和实现阐述得非常清楚,于是我在读的时候顺便把他翻译成了中文,如果有错误的地方请大家指出. 原文:http://www.telesens.co/2018/03/1 ...
- cloudemanager安装时出现failed to receive heartbeat from agent问题解决方法(图文详解)
不多说,直接上干货! 安装cdh5到最后报如下错误: 安装失败,无法接受agent发出的检测信号. 确保主机名称正确 确保端口7182可在cloudera manager server上访问(检查防火 ...
- Kubernetes服务pod的健康检测liveness和readiness详解
Kubernetes服务pod的健康检测liveness和readiness详解 接下来给大家讲解下在K8S上,我们如果对我们的业务服务进行健康检测. Health Check.restartPoli ...
- .NET Excel导出方法及其常见问题详解
摘要:.NET Excel导出方法及其常见问题详解. 一.Excel导出的实现方法 在.net 程序开发中,对于Excel文件的导出我们一共有三种导出方式: 利用文件输出流进行读写操作 这种方式的导出 ...
- cloudemanager安装时出现8475 MainThread agent ERROR Heartbeating to 192.168.30.1:7182 failed问题解决方法(图文详解)
不多说,直接上干货! 问题详情 解决这个问题简单的,是因为有进程占用了.比如 # ps aux | grep super root ? Ss : : /opt/cm-/lib64/cmf/agen ...
- Python进阶----线程基础,开启线程的方式(类和函数),线程VS进程,线程的方法,守护线程,详解互斥锁,递归锁,信号量
Python进阶----线程基础,开启线程的方式(类和函数),线程VS进程,线程的方法,守护线程,详解互斥锁,递归锁,信号量 一丶线程的理论知识 什么是线程: 1.线程是一堆指令,是操作系统调度 ...
- C#类、对象、方法和属性详解
C#类.对象.方法和属性详解 一.相关概念: 1.对象:现实世界中的实体(世间万物皆对象) 2.类:具有相似属性和方法的对象的集合 3.面向对象程序设计的特点:封装 继承 多态 4.对象的三要素:属性 ...
- $.ajax()方法所有参数详解;$.get(),$.post(),$.getJSON(),$.ajax()详解
[一]$.ajax()所有参数详解 url: 要求为String类型的参数,(默认为当前页地址)发送请求的地址. type: 要求为String类型的参数,请求方式(post或get)默认为get.注 ...
- java集合的方法及使用详解
一.java集合的分类及相互之间的关系 Collection接口:向下提供了List和Set两个子接口 |------List接口:存储有序的,存储元素可以重复 |------ArrayList(主要 ...
随机推荐
- LeetCode 653. 两数之和 IV - 输入 BST(Two Sum IV - Input is a BST)
653. 两数之和 IV - 输入 BST 653. Two Sum IV - Input is a BST 题目描述 给定一个二叉搜索树和一个目标结果,如果 BST 中存在两个元素且它们的和等于给定 ...
- [转帖]Windows 7寿终正寝 为何Windows 10屡被吐槽它却无比经典?
Windows 7寿终正寝 为何Windows 10屡被吐槽它却无比经典? https://www.cnbeta.com/articles/tech/908897.htm 是的,一代经典操作系统Win ...
- MySQL中主键id不连贯重置处理办法
MySQL中有时候会出现主键字段不连续,或者顺序乱了,想重置从1开始自增,下面处理方法 先删除原有主键,再新增新主键字段就好了 #删除原有自增主键 ALTER TABLE appraiser_info ...
- logrus 剖析之 formatter
使用 logrus 通过 formatter 来定义输出日志的格式,具体例子如下: package main import ( log "github.com/Sirupsen/logrus ...
- Relative Sort Array
Relative Sort Array Given two arrays arr1 and arr2, the elements of arr2 are distinct, and all eleme ...
- python多线程一些知识点梳理
学习python的进程和线程以来,对这两个概念一直都处于模糊状态,所以决定花点时间好好学习一下这块知识.以下是我自己在学习过程中形成的一些疑问以及搜集的一些相应的比较好的答案,整理如下,方便复习自查. ...
- 2.将多个元素设置为同一行?清除浮动有几种方式?【HTML】
1.将多个元素设置为同一行:float,inline-block 清除浮动的方式: 方法一:添加新的元素 .应用 clear:both: 方法二:父级div定义 overflow: hidden: 方 ...
- vue和react之间的区别
1.Vue和React之间的区别 相同点: Vue和其他框架一样,都有组件开发和虚拟dom 都支持props进行父子组件之间的数据通信 都支持数据驱动视图,不直接操作真实dom 都支持服务器端的 渲染 ...
- SAP ABAP的CI/CD解决方案
如今国外很多partners已经在尝试Jenkins + abapGit + 公有云搭建ABAP CI/CD环境了.ABAP系统的改动通过abapGit提交,触发Jenkins上部署的命令行脚本,脚本 ...
- PHP/Python---百钱百鸡简单实现及优化
公鸡5块钱一只,母鸡3块钱一只,小鸡一块钱3只,用100块钱买一百只鸡,问公鸡,母鸡,小鸡各要买多少只? 今天看到这题很简单 ,但是随手写出来后发现不是最优的