ORB-SLAM(十一)EPnP
EPnP在ORB-SLAM中主要用于Tracking线程中的重定位Relocalization模块,需要通过当前关键帧Bow与候选帧匹配上的3D地图点,迅速建立当前相机的初始姿态。
PnP问题解决了已知世界参考系下地图点以及相机参考系下投影点位置时3D-2D相机位姿估计问题,不需要使用对极约束(存在初始化,纯旋转和尺度问题,且一般需要8对点),可以在较少的匹配点(最少3对点,P3P方法)中获得较好的运动估计,是最重要的一种姿态估计方法。最后,如果知道世界参考系下的地图点,同时知道相机参考系下的地图点,可以通过ICP的方法去求解姿态。
这样就构成了立体视觉中最重要的对极几何,PnP和ICP三种最常用的姿态估计方法。
求解PnP问题目前主要有直接线性变换(DLT),P3P,EPnP,UPnP以及非线性优化方法。
DLT
直接构建一个12个未知数的[R|t]增广矩阵(先不考虑旋转矩阵的自由度只有3),取六个点对,去求解12个未知数(每一个3D点到归一化平面的映射给出两个约束),最后将[R|t]左侧3*3矩阵块进行QR分解,用一个旋转矩阵去近似(将3*3矩阵空间投影到SE(3)流形上)。
P3P
P3P方法是通过3对3D/2D匹配点,求解出四种可能的姿态,在OpenCV calib3d模块中有实现,但是对于相机远离3D平面(low parallax)或者视角垂直于3D平面的情况下效果不佳,不知道最近有没有更新过。论文Complete Solution Classification for the Perspective-Three-Point Problem中提到了一种改进的方法,可以消除这种退化的情况。
将世界坐标系下的ABC三点和图像坐标系下的abc三点匹配,其中AB,BC,AC的长度已知,<a,b>,<b,c>,<a,c>也是已知,通过余弦定理可以求出A,B,C在相机参考系中的坐标,然后使用类似ICP的坐标系对齐,就可以求得当前相机薇姿。
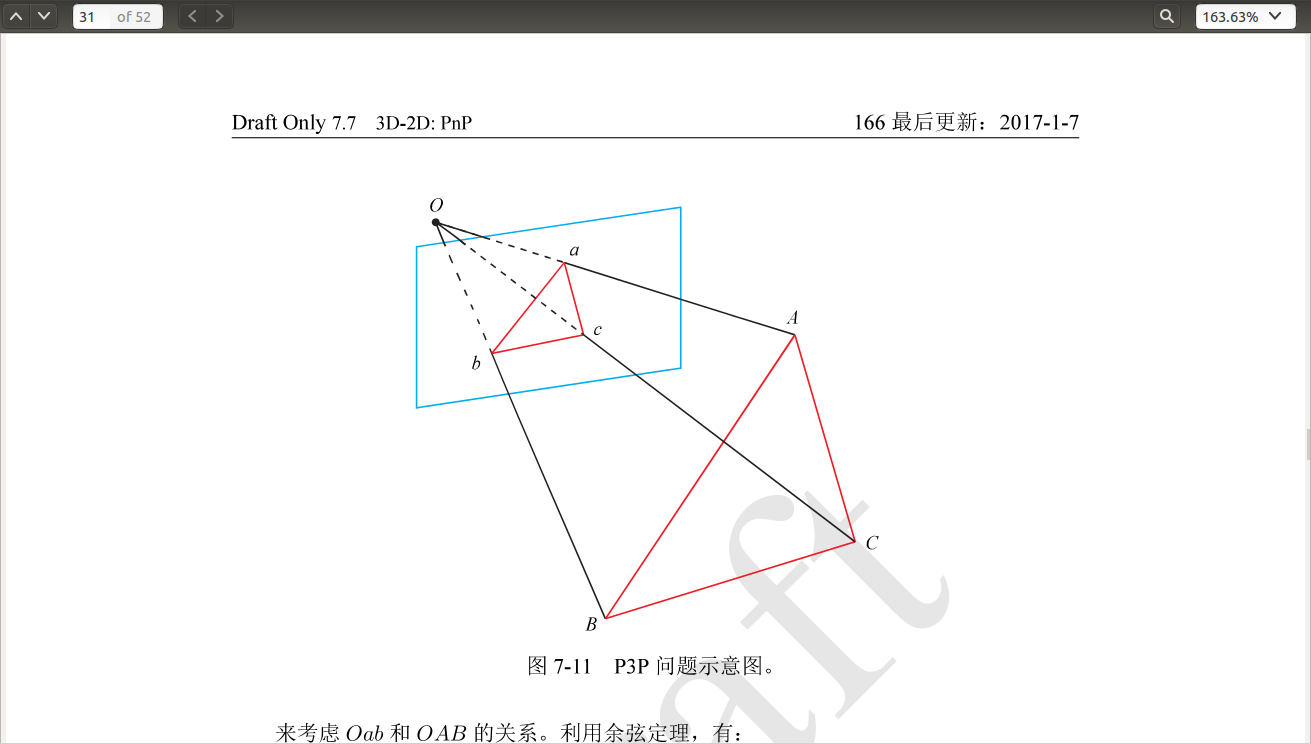
通过余弦定理构建二元二次方程组【2】可以求解出OA,OB,OC之间的长度比例,从而确定世界坐标系下的相机位姿。可以想象一下为什么会出现四个解,在空间中的位置是什么样的,以及为什么在远离3D点平面或者视角垂直3D点平面时,会出现退化情况。
EPnP
需要4对不共面的(对于共面的情况只需要3对)3D-2D匹配点,是目前最有效的PnP求解方法。
The aim of the Perspective-n-Point problem—PnP in short—is to determine the position and orientation of a camera given its intrinsic parameters and a set of n correspondences between 3D points and their 2D projections. It has many applications in Computer Vision, Robotics, Augmented Re- ality and has receivedmuch attention in both the Photogrammetry and Computer Vision communities. In particular, applications such as feature point-based camera tracking require dealing with hundreds of noisy feature points in real-time, which requires computationally efficient methods.
空间中任意3D点的坐标可以用4个不共面的3D点坐标的权重表示
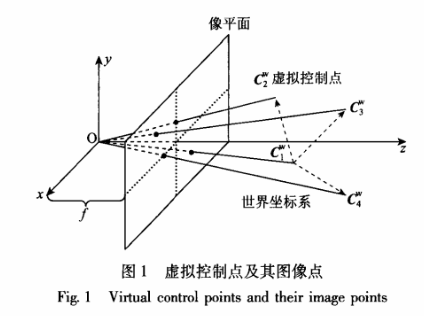
通常选取世界坐标下的四个控制点坐标为Cw=[0,0,0,1]T, [1,0,0,1]T,[0,1,0,1]T,[0,0,1,1]T;通过n个3D点在相机平面的投影关系,以及与这四个控制点的权重关系,构建一个12*12方阵,求得其零空间特征向量,可以得到虚拟控制点的相机平面坐标,然后使用POSIT算法即可求出相机位姿。
通常在用EPnP求得四对点下的封闭解后,可以将该解作为非线性优化的初值,优化提高精度。
主要参考:
1. EPnP:An Accurate O(n) Solution to the PnP problem
2. 高翔,视觉SLAM十四讲
3. http://iplimage.com/blog/p3p-perspective-point-overview/
ORB-SLAM(十一)EPnP的更多相关文章
- [SLAM] 01 "Simultaneous Localization and Mapping" basic knowledge
发信人: leecty (Terry), 信区: ParttimeJobPost标 题: 创业公司招SLAM 算法工程师发信站: 水木社区 (Thu Jun 16 19:18:24 2016), 站内 ...
- [SLAM] 01. "Simultaneous Localization and Mapping"
本篇带你认识SLAM,形成客观的认识和体系 一.通过行业招聘初步了解SLAM 发信人: leecty (Terry), 信区: ParttimeJobPost标 题: 创业公司招SLAM 算法工程师发 ...
- 常用的SLAM解决方案
ORB SLAM 可以去Github上自己搜索现成的SLAM程序包 在此基础上做优化 视觉SLAM的分类方法:按摄像头的多少分为单目和双目,按是否使用概率方法分为概率法和图法 链接 学习SLAM重要的 ...
- 关于ORB SLAM2资源整理(持续更新)
ORB SLAM2源码讲解(吴博) https://www.youtube.com/watch?v=2GVE7FTW7AU 泡泡机器人视频整理: http://space.bilibili.com/3 ...
- 快看,那个学SLAM 的崩溃了!
点"计算机视觉life"关注,置顶更快接收消息! 本文列举了当前优秀SLAM方案,点出了SLAM学习者的困境,最后打算搞点大事 请把此文转发给你认识的SLAM大神,愿你头发浓密,心 ...
- ORB-SLAM2(一)----使用Eclipse进行开发
1.导入项目 准备工作 1, first we should make sure the compile with build.sh under ORB_SLAM2-master is OK. 2, ...
- 2017~ROS暑期学校~分享
http://www.robotics.sei.ecnu.edu.cn/ROS2017/ ---- 往年暑期学校活动:2015年,2016年 报名开始时间7月2日晚10点:暑期学校报名,机器人挑战赛报 ...
- SLAM: Orb_SLAM中的ORB特征
原文链接:什么是ORB 关于Orb特征的获取:参考 最新版的OpenCV中新增加的ORB特征的使用 ORB是是ORiented Brief 的简称,对Brief的特定性质进行了改进. ORB的描述在下 ...
- SLAM:(编译ORB)fatal error LNK1181: 无法打开输入文件“libboost_mpi-vc110-mt-1_57.lib”
对于使用MD版本编译的ORB_SLAM,会用到MPI版本的Boost,需要自己编译,比较麻烦. 因此使用MT版本进行生成,暂时无法完成. 工程配置 发现添加库文件使用了:从父级或项目默认继承,默认包含 ...
随机推荐
- HDU 2018 Multi-University Training Contest 1 Triangle Partition 【YY】
传送门:http://acm.hdu.edu.cn/showproblem.php?pid=6300 Triangle Partition Time Limit: 2000/1000 MS (Java ...
- Entity Framework——性能测试
内容提要 一.对EF框架的性能测试 增.删.改,查测试及性能优化 二.使用sql执行 增.删.改,查测试 三.对以上两种方式对比分析 一 对EF框架的测试 1插入操作测试 测试代码(关键部分) Lis ...
- __future__模块
Python提供了__future__模块,把下一个新版本的特性导入到当前版本,于是我们就可以在当前版本中使用一些新版本的特性,比如除法: 在Python 2.x中,对于除法有两种情况,如果是整数相除 ...
- Leetcode225 用栈实现队列
大众思路: 用两个栈实现,记为s1,s2 1.元素入栈时,加入s1 2.元素出栈时,对s2进行判断,如果s2为空,则将全部s1元素弹出并压入到s2,然后从s2栈顶弹出一个元素:如果s2不为空,则直接从 ...
- 解决IntelliJ IDEA控制台输出中文乱码问题
一.原因: windows下的本地编码(GBK) ,在idea 整合的 maven中使得默认vm 的编码是utf-8.所以出现控制台乱码.tomcat设置的utf-8也会与window设置的gbk冲突 ...
- RabbitMQ + topic发送消息+python
接口使用两个queue监听信息,且有两个测试环境,所以需要向mq中发送测试数据: python使用pika包:Pika is a RabbitMQ (AMQP-0-9-1) client librar ...
- 关于void*类型的用法(相当于OC中的id类型)
关于void*类型的用法(相当于OC中的id类型) 1.C++语言在对于void* 类型的使用很特别,因为void* 可以间接引用任何其他数据类型的指针,比如int*.float*甚至抽象数据类型的指 ...
- “SAP.Middleware.Connector.RfcDestinationManager”的类型初始值设定项引发异常
在VS2015中使用SAP Connector 3.0(SapNco)的.net4.0x86版本开发时,程序运行到RfcDestinationManager.TryGetDestination时报错: ...
- Gradle Goodness: Check Task Dependencies With a Dry Run
We can run a Gradle build without any of the task actions being executed. This is a so-called dry ru ...
- ASP.NET教程
1.ASP.NET是一个使用Html Css JavaScript和服务器脚本创建网页和网站的开发框架 2.ASP.NET支持三种开发模式:WebPages(Web页面).MVC(Model View ...