【cartographer_ros】四: 发布和订阅里程计odom信息
上一节介绍了激光雷达Scan传感数据的订阅和发布。
本节会介绍里程计Odom数据的发布和订阅。里程计在cartographer中主要用于前端位置预估和后端优化。
官方文档:
http://wiki.ros.org/navigation/Tutorials/RobotSetup/Odom
目录
1:nav_msgs/Odometry消息类型
在终端查看消息数据结构:
rosmsg show nav_msgs/Odometry
Odometry消息类型数据结构如下:
Header header
string child_frame_id
geometry_msgs/PoseWithCovariance pose
geometry_msgs/TwistWithCovariance twist
其中pose是位置数据,twist是速度数据。
因为还有其他的数据结构,这里展开一下,更加清晰一点:
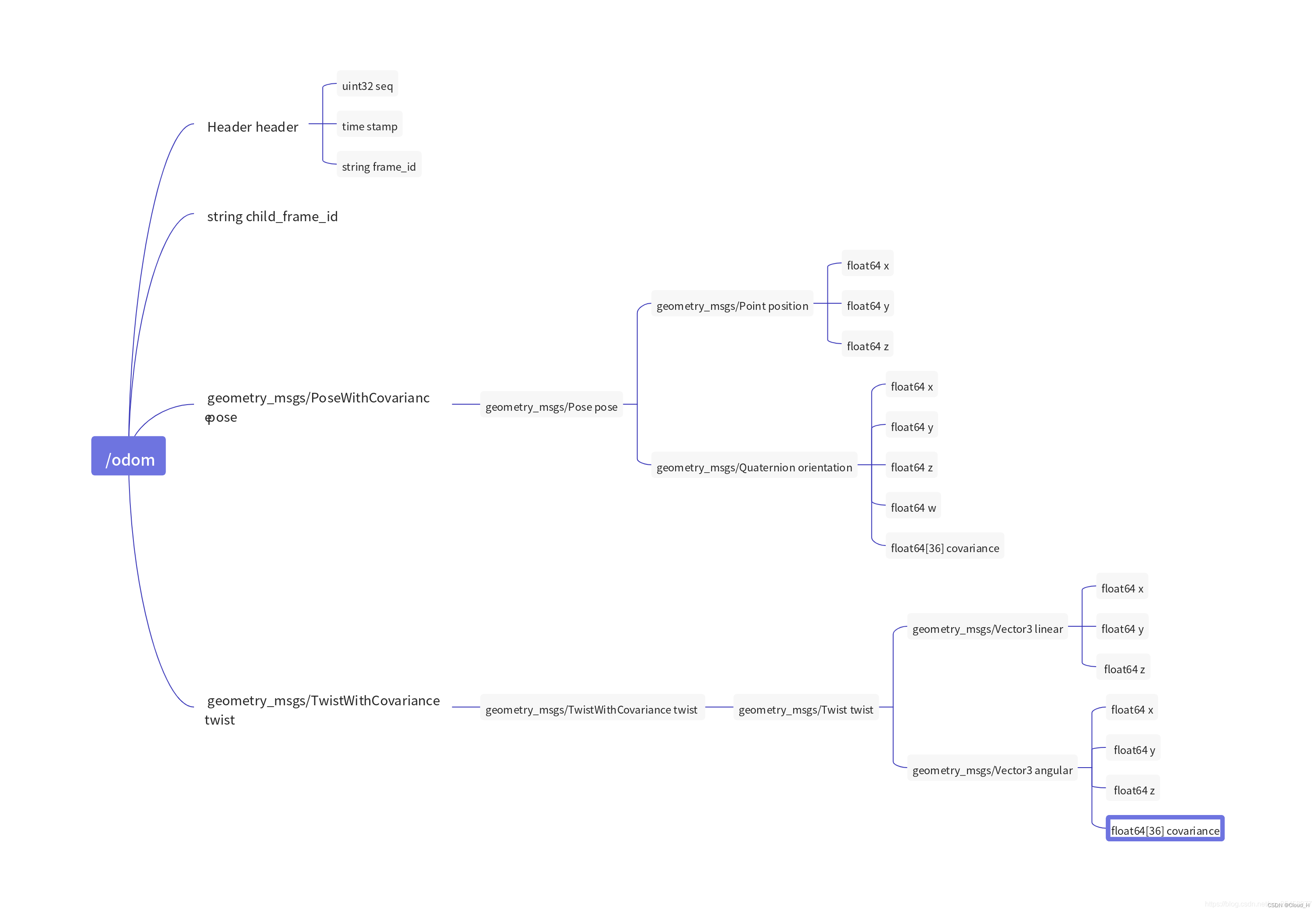
2:发布Odometry消息
定义了在一个圆圈中行驶的假机器人的里程计数据用来进行发布
#include <ros/ros.h>
#include <tf/transform_broadcaster.h>
#include <nav_msgs/Odometry.h>
int main(int argc, char** argv){
ros::init(argc, argv, "odometry_publisher");
//创建一个ros::Publisher和一个tf::TransformBroadcaster以便能够分别使用 ROS 和 tf 发送消息。
ros::NodeHandle n;
ros::Publisher odom_pub = n.advertise<nav_msgs::Odometry>("odom", 50);
tf::TransformBroadcaster odom_broadcaster;
double x = 0.0;
double y = 0.0;
double th = 0.0;
double vx = 0.1;
double vy = -0.1;
double vth = 0.1;
ros::Time current_time, last_time;
current_time = ros::Time::now();
last_time = ros::Time::now();
ros::Rate r(1.0);
while(n.ok()){
ros::spinOnce();
current_time = ros::Time::now();
//根据设置的速度更新里程信息
double dt = (current_time - last_time).toSec();
double delta_x = (vx * cos(th) - vy * sin(th)) * dt;
double delta_y = (vx * sin(th) + vy * cos(th)) * dt;
double delta_th = vth * dt;
x += delta_x;
y += delta_y;
th += delta_th;
geometry_msgs::Quaternion odom_quat = tf::createQuaternionMsgFromYaw(th);
//创建一个TransformStamped消息,通过 tf发布从“odom”到“base_link”的转换
geometry_msgs::TransformStamped odom_trans;
odom_trans.header.stamp = current_time;
odom_trans.header.frame_id = "odom";
odom_trans.child_frame_id = "base_link";
odom_trans.transform.translation.x = x;
odom_trans.transform.translation.y = y;
odom_trans.transform.translation.z = 0.0;
odom_trans.transform.rotation = odom_quat;
odom_broadcaster.sendTransform(odom_trans);
//填充Odometry消息
nav_msgs::Odometry odom;
odom.header.stamp = current_time;
odom.header.frame_id = "odom";
//设置位置
odom.pose.pose.position.x = x;
odom.pose.pose.position.y = y;
odom.pose.pose.position.z = 0.0;
odom.pose.pose.orientation = odom_quat;
//设置速度
odom.child_frame_id = "base_link";
odom.twist.twist.linear.x = vx;
odom.twist.twist.linear.y = vy;
odom.twist.twist.angular.z = vth;
//发布Odometry消息
odom_pub.publish(odom);
last_time = current_time;
r.sleep();
}
}
3:订阅Odometry消息
(1) 通过rosbag订阅
rostopic echo /odom
(2) 通过rviz查看
打开rviz
rosrun rviz rviz
Fixed Frame修改为base_link,添加Odometry并将Topic设为/odom(3) 编写程序打印
#include "ros/ros.h"
#include "nav_msgs/Odometry.h"
#include "tf/transform_listener.h"
void OdomCallback(const nav_msgs::Odometry::ConstPtr &msg)
{
double x, y, z;
double roll, pitch, yaw;
x = msg->pose.pose.position.x;
y = msg->pose.pose.position.y;
z = msg->pose.pose.position.z;
tf::Quaternion quat; //定义一个四元数
tf::quaternionMsgToTF(msg->pose.pose.orientation, quat); //取出方向存储于四元数
tf::Matrix3x3(quat).getRPY(roll, pitch, yaw);
ROS_INFO("Odom: %f, %f, %f, %f, %f, %f", x, y, z, roll, pitch, yaw);
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "listener");
ros::NodeHandle node;
ros::Subscriber subOdom = node.subscribe("odom", 1000, OdomCallback);
ros::spin();
return 0;
}
【完】
下一节会介绍陀螺仪Imu数据的发布和订阅
【cartographer_ros】四: 发布和订阅里程计odom信息的更多相关文章
- 【cartogarpher_ros】三: 发布和订阅雷达scan信息
上一节介绍和测试了cartographer的官方demo. 本节会编写ros系统中,最常用的激光雷达LaserScan传感数据的订阅和发布,方便在cartographer中加入自己的数据进行建图与定位 ...
- SLAM+语音机器人DIY系列:(四)差分底盘设计——6.底盘里程计标
摘要 运动底盘是移动机器人的重要组成部分,不像激光雷达.IMU.麦克风.音响.摄像头这些通用部件可以直接买到,很难买到通用的底盘.一方面是因为底盘的尺寸结构和参数是要与具体机器人匹配的:另一方面是因为 ...
- 【cartographer_ros】五: 发布和订阅陀螺仪Imu信息
上一节介绍了里程计Odometry传感数据的订阅和发布. 本节会介绍陀螺仪Imu数据的发布和订阅.陀螺仪在cartographer中主要用于前端位置预估和后端优化. 目录 1:sensor_msgs/ ...
- 【cartographer_ros】六: 发布和订阅路标landmark信息
上一节介绍了陀螺仪Imu传感数据的订阅和发布. 本节会介绍路标Landmark数据的发布和订阅.Landmark在cartographer中作为定位的修正补充,避免定位丢失. 这里着重解释一下Land ...
- 视觉slam十四讲个人理解(ch7视觉里程计1)
参考博文::https://blog.csdn.net/david_han008/article/details/53560736 https://blog.csdn.net/n66040927/ar ...
- ROS中测试机器人里程计信息
在移动机器人建图和导航过程中,提供相对准确的里程计信息非常关键,是后续很多工作的基础,因此需要对其进行测试保证没有严重的错误或偏差.实际中最可能发生错误的地方在于机器人运动学公式有误,或者正负号不对, ...
- SLAM+语音机器人DIY系列:(三)感知与大脑——3.轮式里程计与运动控制
摘要 在我的想象中机器人首先应该能自由的走来走去,然后应该能流利的与主人对话.朝着这个理想,我准备设计一个能自由行走,并且可以与人语音对话的机器人.实现的关键是让机器人能通过传感器感知周围环境,并通过 ...
- 知方可补不足~SQL2008中的发布与订阅模式
回到目录 作用:完成数据库与数据库的数据同步 原理:源数据库发布需要同时的表,存储过程,或者函数:目标数据库去订阅它,当源发生变化时,目标数据库自己同步,注意,由于这个过程是SQL自动完成的,所以要求 ...
- redis 笔记06 发布与订阅、事务、慢查询日志、监视器
发布与订阅 1. 服务器状态在pubsub_channels字典保存了所有频道的订阅关系:SUBSCRIBE命令负责将客户端和被订阅的频道关联到这个字典里面,而UNSUBSCRIBE命令则负责 解除客 ...
随机推荐
- 在django中使用orm来操作MySQL数据库的建表,增删改
多张表之间的三种关系:一对一,一对多,多对多 创建表 一对一 xx = models.OneToOneField(to='表明',to_field='字段名',on_delete=models.CAS ...
- Jqgrid 动态设置cell disabled
$($(grid2.jqGrid("getGridRowById", i + 1))[0].children).each(function (childI, childO) { i ...
- 斯坦福NLP课程 | 第1讲 - NLP介绍与词向量初步
作者:韩信子@ShowMeAI,路遥@ShowMeAI,奇异果@ShowMeAI 教程地址:http://www.showmeai.tech/tutorials/36 本文地址:http://www. ...
- Java多线程—线程同步(单信号量互斥)
JDK中Thread.State类的几种状态 线程的生命周期 线程的安全问题(同步与互斥) 方法一:同步代码块 多个线程的同步监视器(锁)必须的是同一把,任何一个类的对象都可以 syn ...
- Spring 源码(9)Spring Bean的创建过程的前期准备
回顾总结 到目前为止,Spring源码中AbstractApplicationContext#refresh方法的已经解读到第11个方法finishBeanFactoryInitialization, ...
- django基础--02基于数据库的小项目
摘要:简单修改.增加部分页面,了解django开发的过程.(Python 3.9.12,django 4.0.4 ) 接前篇,通过命令: django-admin startproject myWeb ...
- salesforce零基础学习(一百一十三)Trigger中获取IP地址的过程
本篇参考: https://developer.salesforce.com/docs/atlas.en-us.228.0.apexcode.meta/apexcode/apex_class_Auth ...
- 用更云原生的方式做诊断|大规模 K8s 集群诊断利器深度解析
背景 通常而言,集群的稳定性决定了一个平台的服务质量以及对外口碑,当一个平台管理了相当规模数量的 Kubernetes 集群之后,在稳定性这件事上也许会"稍显被动". 我们可能经常 ...
- A* K短路
注:\(A*\) 求解K短路效率极其低下,时间复杂度\(O(nklog\ n)\),空间视题目而定,因为本质是爆搜,可求解数据范围较小的题目. 我们使用\(A*\)求解k短路: 首先需要预处理出估价函 ...
- Unity-UGUI-无限循环列表
前言:项目准备新增一个竞技场排行榜,策划规定只显示0-400名的玩家.我一想,生成四百个游戏物体,怕不是得把手机给卡死?回想原来在GitHub上看到过一个实现思路就是无限循环列表,所以就想自己试试.公 ...