玩转X-CTR100 l STM32F4 l PS2无线手柄-4WD智能小车

我造轮子,你造车,创客一起造起来!更多塔克创新资讯【塔克社区 www.xtark.cn 】【塔克博客 www.cnblogs.com/xtark/ 】
前面已介绍X-CTR100控制器解码PS2无线手柄,本文继续前文,使用PS2无线手柄,实现4WD智能小车的控制,实现两种控制模式,方向模式和坦克模式。
例程-PS2无线手柄-4WD智能小车(方向模式)
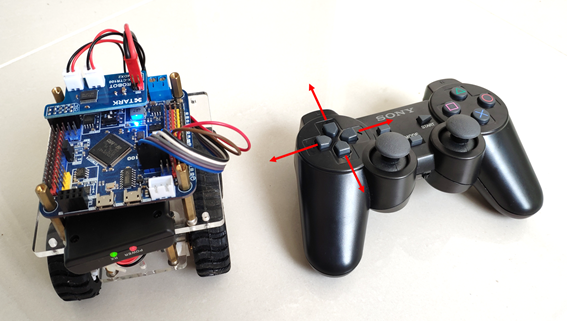
使用4个方向按键,实现智能小车前进、后退、原地左转、原地右转四个运动操作。
硬件说明
硬件资源:
- 串口UART1
- LC扩展接口(非串口,作为普通IO口使用)
- RO、RP接口,控制电机
- X-CTR100-MDX2电机驱动模块或自备其它直流电机驱动模块(自备)
- PS2无线手柄(需自备)
PS2手柄连接关系如下,
DATA——LC接口-D6
COMM——LC接口-D5
GND——LC接口-GND
VCC——LC接口-3.3V
ATT——LC接口-D7
CLOCK——LC接口-D4
ACK——LC接口-D3
特别说明,注意左右电机连接顺序和电机正反连接顺序,如果不能按照预期动作,请自行调整,或修改程序代码。
软件说明
主程序代码如下。
|
int main(void) { //X-CTR100初始化 AX_Init(115200); printf("***X-CTR100 PS2无线手柄例程***\r\n\r\n"); //功能配置 AX_MOTOR_TIM1_MNOP_Init(20); //初始化电机控制端口,PWM频率为20KHz AX_PS2_Init(); //PS2初始化 AX_Delayms(10);
while (1) { AX_PS2_ScanKey(&my_joystick);
//LR按键控制方式(塔克模式) if((my_joystick.btn1|0xEF) == 0xEF) //前 { AX_MOTOR_TIM1_O_SetSpeed(60); AX_MOTOR_TIM1_P_SetSpeed(60); } else if((my_joystick.btn1|0xBF) == 0xBF) //后 { AX_MOTOR_TIM1_O_SetSpeed(-60); AX_MOTOR_TIM1_P_SetSpeed(-60); } else if((my_joystick.btn1|0xDF) == 0xDF) //右 { AX_MOTOR_TIM1_O_SetSpeed(-60); AX_MOTOR_TIM1_P_SetSpeed(60); } else if((my_joystick.btn1|0x7F) == 0x7F) //左 { AX_MOTOR_TIM1_O_SetSpeed(60); AX_MOTOR_TIM1_P_SetSpeed(-60); } else //停止 { AX_MOTOR_TIM1_O_SetSpeed(0); AX_MOTOR_TIM1_P_SetSpeed(0); }
printf("MODE:%2x BTN1:%2x BTN2:%2x RJOY_LR:%2x RJOY_UD:%2x LJOY_LR:%2x LJOY_UD:%2x\r\n", my_joystick.mode, my_joystick.btn1, my_joystick.btn2, my_joystick.RJoy_LR, my_joystick.RJoy_UD, my_joystick.LJoy_LR, my_joystick.LJoy_UD);
AX_Delayms(30); } } |
转速可根据自己的4WD转速调试,支持-200~200转速,负为倒转,0为停止。
例程-PS2无线手柄-4WD智能小车(坦克模式)
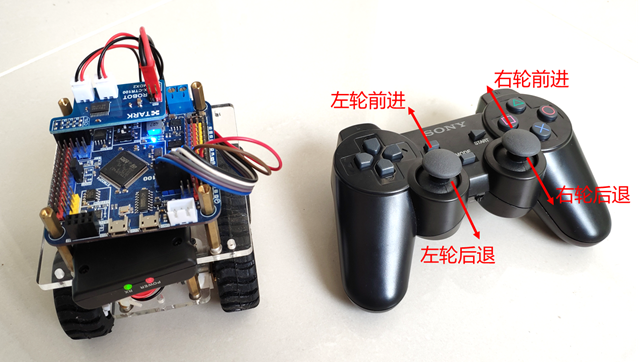
像坦克车一样使用左右摇杆控制小车,左摇杆控制左轮前进后退,可调速,右摇杆控制右轮。
硬件说明
硬件资源:
- 串口UART1
- LC扩展接口(非串口,作为普通IO口使用)
- RO、RP接口,控制电机
- X-CTR100-MDX2电机驱动模块或自备其它直流电机驱动模块(自备)
- PS2无线手柄(需自备)
PS2手柄连接关系如下,
DATA——LC接口-D6
COMM——LC接口-D5
GND——LC接口-GND
VCC——LC接口-3.3V
ATT——LC接口-D7
CLOCK——LC接口-D4
ACK——LC接口-D3
特别说明,注意左右电机连接顺序和电机正反连接顺序,如果不能按照预期动作,请自行调整,或修改程序代码。
软件说明
主程序代码如下。
|
int main(void) { //X-CTR100初始化 AX_Init(115200); printf("***X-CTR100 PS2无线手柄例程***\r\n\r\n"); //功能配置 AX_MOTOR_TIM1_MNOP_Init(20); //初始化电机控制端口,PWM频率为20KHz AX_PS2_Init(); //PS2初始化 AX_Delayms(1);
while (1) { AX_PS2_ScanKey(&my_joystick);
//双摇杆控制方式(塔克模式) //左摇杆控制左轮前进后退,右摇杆控制右轮 AX_MOTOR_TIM1_O_SetSpeed((0x7F-my_joystick.RJoy_UD)/2); AX_MOTOR_TIM1_P_SetSpeed((0x7F-my_joystick.LJoy_UD)/2);
//打印手柄键值 printf("MODE:%2x BTN1:%2x BTN2:%2x RJOY_LR:%2x RJOY_UD:%2x LJOY_LR:%2x LJOY_UD:%2x\r\n", my_joystick.mode, my_joystick.btn1, my_joystick.btn2, my_joystick.RJoy_LR, my_joystick.RJoy_UD, my_joystick.LJoy_LR, my_joystick.LJoy_UD);
AX_Delayms(30); } } |
玩转X-CTR100 l STM32F4 l PS2无线手柄-4WD智能小车的更多相关文章
- 玩转X-CTR100 l STM32F4 l PS2无线手柄
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] SONY的PS2无线手柄是索尼游戏机的遥控手柄,控制 ...
- 玩转X-CTR100 l 平台-4WD智能小车
我造轮子,你造车,创客一起造起来!更多塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍使用X-CTR100控制器搭建4WD智能 ...
- 玩转X-CTR100 l STM32F4 l ADC 模拟数字转换
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器 AD转换接 ...
- 玩转X-CTR100 l STM32F4 l MPU6050加速度陀螺仪传感器
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器 板载加速度 ...
- 玩转X-CTR100 l STM32F4 l X-CTR100与树莓派搭建机器人平台
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器与树莓派Linux系统 ...
- 玩转X-CTR100 l STM32F4 l 舵机控制
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器的舵机控制,X-CTR ...
- 玩转X-CTR100 l STM32F4 l DRV8825 A4988 步进电机控制
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器控制步进电机 ...
- 玩转X-CTR100 l STM32F4 l 基础例程printf、LED、蜂鸣器、拨码开关、位带操作
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器基础板载资源 ...
- 玩转X-CTR100 l STM32F4 l DSP指令集性能测试
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器 DSP库的 ...
随机推荐
- excel依赖的dll
依赖的先后顺序 stdole.dll office.dll Microsoft.Vbe.Interop.dll Microsoft.Office.Interop.Excel.dll Interop是i ...
- Intellij新建Spring项目引入用户目录下的Spring jar包
首先,在IntelliJ IDEA中新建module,选择Spring应用: 在初次使用时,如果IDE检测到本地没有spring核心库,则会在新建过程中下载对应库文件,在使用spring框架时,可 ...
- left join联查提高执行性能
本文为博主原创,未经允许不得转载: 在项目应用中,很多功能需要多张数据库表联查,甚至跨数据库查询获取数据.sql的执行性能很能影响 服务的体验感,今天就遇到了这样问题,原来的sql是这样的: sele ...
- POJ 1953 World Cup Noise(递推)
https://vjudge.net/problem/POJ-1953 题意:输入一个n,这n位数只由0和1组成,并且不能两个1相邻.计算共有多少种排列方法. 思路:递推题. 首先a[1]=2,a[2 ...
- 关于ExtJS Row editing 行编辑 后 获取 编辑后记录值 的方法
listUsersGrid.on('edit', function(editor, e) { var pass = editor.record.data.password; editor.record ...
- Java 集合、Iterator迭代器、泛型等
01集合使用的回顾 A:集合使用的回顾 a.ArrayList集合存储5个int类型元素 public static void main(String[] args) { ArrayList<I ...
- Python day13文件的读写
# 文件操作 f=open("E:\\1.txt",encoding="GBK")#打开文件 print(f.writable())#是否可写 print(f. ...
- java后台校验 hibernate validator
链接 : https://www.cnblogs.com/softidea/p/6044123.html
- 关于Dos命令中存在中文的解决方法
问题:当我们直接打开dos窗口并在里面写入中文时是没有问题的,但是当我们把这些命令放在bat文件中执行时就出问题了解决:1.首先可以通过pause命令来查看错误原因2.记事本默认是UTF-8格式的,而 ...
- ubuntu , 笔记本合上盖子时不关机的方法。
实测ubuntu 14.04 好使 1) 编辑 /etc/systemd/logind.conf 2) 找到 HandleLidSwitch 设置,去掉行头注释#,然后改成下面这样 HandleLid ...