基于OMAPL138的Linux字符驱动_GPIO驱动AD9833(二)之cdev与read、write
基于OMAPL138的Linux字符驱动_GPIO驱动AD9833(二)之cdev与read、write
0. 导语
在上一篇博客里面,基于OMAPL138的字符驱动_GPIO驱动AD9833(一)之ioctl 中使用#include <linux/miscdevice.h>中的miscdevice机制,在呢篇博客中使用宋宝华的Linux驱动设备中提供的cdev机制完成注册,
根据参考文献[1]中所说:
misc设备其实也是字符设备,主不过misc设备驱动在字符设备的基础上又进行了一次封装,使用户可以更方便的使用。
在本次实验中确实印证了使用cdev比较复杂,且加载ko模块驱动之后还需要查看设备号,手动mknod节点,而且在卸载驱动的时候也是非常繁琐的,但在这里本着学习的目的也进行了实验,后续的开发会使用miscdevice机制而不使用cdev机制
本次实验主要针对字符设备的:
- cdev注册设备
- read函数的使用
- write函数的使用
在上一篇博客基于OMAPL138的字符驱动_GPIO驱动AD9833(一)之ioctl,只能用ioctl函数进行一个字节的幻数进行指令通信,但无法传输类似于设置频率指令。如果传递这样的参数,只需要使用write和read函数完成数据的传递。
1. cdev的使用
cdev的定义
cdev的定义信息包含在#include <linux/cdev.h>头文件中,需要使用cdev当然要定义cdev的结构体了,我们将cdev的信息定义在了我们的设备定义struct ad9833下。
AD9833 结构体定义:
struct ad9833_t {
struct ad9833_hw_t hw;
struct ad9833_t *self;
enum ad9833_wavetype_t wave_type;
struct cdev cdev;
unsigned char mem[ AD9833_SIZE ];
unsigned int delay;
void (*write_reg) ( AD9833 *self, unsigned int reg_value);
void (*init_device) ( AD9833 *self );
void (*set_wave_freq)( AD9833 *self , unsigned long freqs_data);
void (*set_wave_type)( AD9833 *self, enum ad9833_wavetype_t wave_type );
void (*set_wave_phase)( AD9833 *self, unsigned int phase );
void (*set_wave_para)( AD9833 *self, unsigned long freqs_data, unsigned int phase, enum ad9833_wavetype_t wave_type );
};
结构体内的struct cdev cdev就为我们使用的cdev目的就是向Linux内核申请自己的位置。
创建主设备号和次设备号
使用cdev需要向内核申请一个空间,则需要有一个主设备号提交给内核,我们可以使用Linux内核提供的一套宏函数来进行设备好的申请。通常的做法在设备init的函数里面。
MK_MAJOR( major, minor ); major 主设备号和 minor 次设备号,同款型的第二个设备次设备就是 2 以此类推。
#define AD9833_MAJOR 230
dev_t devno;
devno = MKDEV( AD9833_MAJOR, 0 );
这个号码在我们mknod的时候比如,#mknod /dev/AD9833-ADI c 230 0 这个地方就会用到了。
cdev注册
int register_chrdev_region( dev_t from, unsigned int size, const char *name );
int alloc_chrdev_region( dev_t *dev, unsigned baseminor, unsigned count );
两个函数完成注册,第一个用于已知设备号的情况下,alloc那个用于未知设备号的,他会帮你分配设备号码。这里我们当然使用register_chrdev_region,里面第一个参数dev_t from就是我们上一个定义的dev_t devno = MKDEV(..)那个。
cdev初始化程序
dev_t devno;
static int __init ad9833_dev_init( void )
{
int i,ret;
int index_minor = 0;
int mk_major;
/*
* cdev alloc and release device code.
* */
devno = MKDEV( ad9833_major, index_minor );
mk_major = MKDEV(ad9833_major, 0);
if( ad9833_major ) {
ret = register_chrdev_region( devno, 1, DRV_NAME );
}else {
ret = alloc_chrdev_region( &devno, 0, 1, DRV_NAME );
ad9833_major = MAJOR(devno);
}
if( ret < 0 ) {
printk(DRV_NAME "\t cdev alloc space failed.\n");
return ret;
}
/*
* AD9833 new device
* */
printk( DRV_NAME "\tApply memory for AD9833.\n" );
ad9833 = ad9833_dev_new();
if( !ad9833 ) {
ret = -ENOMEM;
printk(DRV_NAME "\tad9833 new device failed!\n" );
goto fail_malloc;
}
/*
* AD9833 init gpios.
* */
printk( DRV_NAME "\tInititial GPIO\n" );
for ( i = 0; i < 3; i ++ ) {
ret = gpio_request( ad9833_gpios[i], "AD9833 GPIO" );
if( ret ) {
printk("\t%s: request gpio %d for AD9833 failed, ret = %d\n", DRV_NAME,ad9833_gpios[i],ret);
return ret;
}else {
printk("\t%s: request gpio %d for AD9833 set succussful, ret = %d\n", DRV_NAME,ad9833_gpios[i],ret);
}
gpio_direction_output( ad9833_gpios[i],1 );
gpio_set_value( ad9833_gpios[i],0 );
}
/*
* cdev init.
* */
cdev_init( &ad9833->cdev, &ad9833_fops );
ad9833->cdev.owner = THIS_MODULE;
ret = cdev_add( &ad9833->cdev, mk_major,1 );
if( ret ) {
printk( KERN_NOTICE "Error %d adding ad9833 %d", ret, 1 );
return ret;
}
//ret = misc_register( &ad9833_miscdev );
printk( DRV_NAME "\tinitialized\n" );
return 0;
fail_malloc:
unregister_chrdev_region( mk_major,1 );
return ret;
}
cdev的释放设备
rmmod之后设备要进行释放,这个地方必须正确释放,否则我们下载安装模块的时候只能重启。
void unregister_chrdev_region( dev_t from, unsigned count ) ,进行设备的释放。
static void __exit ad9833_dev_exit( void )
{
int i;
for( i = 0; i < 3; i++) {
gpio_free( ad9833_gpios[i] );
}
//misc_deregister( &ad9833_miscdev );
unregister_chrdev_region( devno,1 );
}
cdev设备的使命就完成了。
2. file read write操作
需要在file_operations结构体里面指定read和write函数:
file_operations结构体参数:
static struct file_operations ad9833_fops = {
.owner = THIS_MODULE,
.read = ad9833_driver_read,
.write = ad9833_driver_write,
.unlocked_ioctl = ad9833_ioctl,
};
这里面ad9833_driver_read和ad9833_driver_write函数就指定了读写函数。这里有个对应问题,正常思维是用户的write函数对应内核驱动的read函数,用户的read函数对应内核驱动的write函数,但这里面,用户的read函数对应的是内核的read函数,用户的write函数也是对应内核的write函数。所以,当用户写应用程序write数据的时候,我们应该在ad9833_write函数里面读取这个数据处理,当对方read的时候,我们需要在ad9833_read里面进行处理read事件。
read函数
static ssize_t
ad9833_driver_read( struct file *filp, const char __user *buffer, size_t size, loff_t *f_pos )
{
unsigned long p = *f_pos;
unsigned int count = size;
int ret = 0;
if ( p >= AD9833_SIZE )
return 0;
if ( count > AD9833_SIZE - p )
count = AD9833_SIZE - p;
if ( copy_to_user( buffer, ad9833->mem + p, count) ) {
ret = -EFAULT;
}else {
*f_pos += count;
ret = count;
printk( DRV_NAME "\tread %u bytes from %lu\n", count, p );
}
return ret;
}
这里有个特殊的处理,copy_to_user函数,对于用户传递进来的指针,对其直接进行读取写入很危险的,所以这里使用copy_to_user把数据传递给用户,比较安全。
write函数
static ssize_t
ad9833_driver_write( struct file *filp, const char __user *buffer, size_t size, loff_t *f_pos )
{
unsigned long p = *f_pos;
unsigned int count = size;
int ret = 0;
if ( p >= AD9833_SIZE )
return 0;
if ( count > AD9833_SIZE - p )
count = AD9833_SIZE - p;
memset( ad9833->mem,0, AD9833_SIZE );
if ( copy_from_user( ad9833->mem + p, buffer, count) ) {
ret = -EFAULT;
}else {
*f_pos += count;
ret = count;
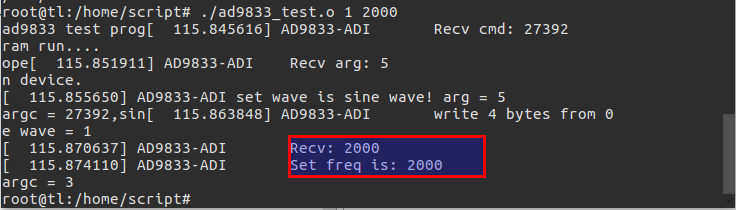
printk( DRV_NAME "\twrite %u bytes from %lu\n", count, p );
printk( DRV_NAME "\tRecv: %s \n", ad9833->mem + p );
printk( DRV_NAME "\tSet freq is: %d \n", simple_strtol(ad9833->mem + p,"str",0) );
ad9833->set_wave_freq(ad9833, simple_strtol(ad9833->mem + p,"str",0) );
}
return ret;
}
同理,直接操作用户传递进来的指针,很危险的,在write函数里copy_from_user进行数据转移交换,完成处理。这个write函数里面,用户通过write函数向驱动写入指令信息,然后解析出来,得到频率控制字,完成运算。
运行程序
把内核文件uImage拷贝到目标板子,把ad9833.ko文件也拷贝到目标板。
1) 加载驱动
#insmod ad9833.ko

2) 查看驱动挂载情况
#cat /proc/devices
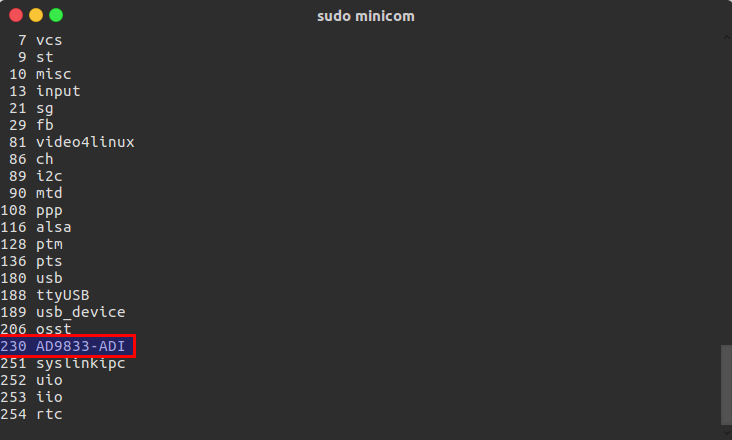
3) 制作设备节点
#mknod /dev/AD9833-ADI c 230 0

就可以看见/dev/AD9833-ADI的节点了。
4) 运行测试程序
/*
CROSS=arm-none-linux-gnueabi-
all: ad9833_test
ad9833_test: ad9833_test.c
$(CROSS)gcc -o ad9833_test.o ad9833_test.c -static
clean:
@rm -rf ad9833_test *.o
* */
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <sys/types.h>
#include <sys/ioctl.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <string.h>
#define AD9833_MAGIC 'k'
#define CMD_TYPE_SIN _IO( AD9833_MAGIC, 0)
#define CMD_TYPE_TRI _IO( AD9833_MAGIC, 1)
#define CMD_TYPE_SQE _IO( AD9833_MAGIC, 2)
const char dev_path[]="/dev/AD9833-ADI";
int main(int argc , char *argv[])
{
int fd = -1, i = 0;
printf("ad9833 test program run....\n");
fd = open(dev_path, O_RDWR|O_NDELAY); // 打开设备
if (fd < 0) {
printf("Can't open /dev/AD9833-ADI\n");
return -1;
}
printf("open device.\n");
if( strcmp(argv[1],"1") == 0 ) {
ioctl(fd, CMD_TYPE_SIN, 5);
printf("argc = %d,sine wave = %s \n", CMD_TYPE_SIN, argv[1]);
}else if( strcmp(argv[1],"2") == 0 ) {
ioctl(fd, CMD_TYPE_TRI, 1);
printf("argc = %d,tri wave = %s \n", CMD_TYPE_TRI,argv[1]);
}else{
ioctl(fd, CMD_TYPE_SQE, 1);
printf("argc = %d,sqe wave = %s \n", CMD_TYPE_SQE, argv[1]);
}
write(fd, argv[2], strlen(argv[2]));
printf("argc = %d\n", argc);
close(fd);
return 0;
}
编译成.o文件运行:
#mknod /dev/AD9833-ADI c 230 0
得到效果。
源代码下载
链接: https://pan.baidu.com/s/1lioLal_mvnbONFLQCBRF7w 密码: 5ptq
参考文献
[1] xiaobu1990, linux 字符设备和misc设备, 2014年10月15日
基于OMAPL138的Linux字符驱动_GPIO驱动AD9833(二)之cdev与read、write的更多相关文章
- 基于OMAPL138的Linux字符驱动_GPIO驱动AD9833(一)之miscdevice和ioctl
基于OMAPL138的Linux字符驱动_GPIO驱动AD9833(一)之miscdevice和ioctl 0. 导语 在嵌入式的道路上寻寻觅觅很久,进入嵌入式这个行业也有几年的时间了,从2011年后 ...
- 基于OMAPL138的字符驱动_GPIO驱动AD9833(三)之中断申请IRQ
基于OMAPL138的字符驱动_GPIO驱动AD9833(三)之中断申请IRQ 0. 导语 学习进入到了下一个阶段,还是以AD9833为例,这次学习是向设备申请中断,实现触发,在未来很多场景,比如做用 ...
- 基于tiny4412的Linux内核移植 -- MMA7660驱动移植(九-2)
作者信息 作者: 彭东林 邮箱:pengdonglin137@163.com QQ:405728433 平台简介 开发板:tiny4412ADK + S700 + 4GB Flash 要移植的内核版本 ...
- 基于tiny4412的Linux内核移植 -- MMA7660驱动移植(九)
作者信息 作者: 彭东林 邮箱:pengdonglin137@163.com QQ:405728433 平台简介 开发板:tiny4412ADK + S700 + 4GB Flash 要移植的内核版本 ...
- 基于tiny4412的Linux内核移植 -- eMMC驱动移植(六)
作者信息 作者: 彭东林 邮箱:pengdonglin137@163.com QQ:405728433 平台简介 开发板:tiny4412ADK + S700 + 4GB Flash 要移植的内核版本 ...
- Linux内核驱动学习(三)字符型设备驱动之初体验
Linux字符型设备驱动之初体验 文章目录 Linux字符型设备驱动之初体验 前言 框架 字符型设备 程序实现 cdev kobj owner file_operations dev_t 设备注册过程 ...
- 深入理解Linux字符设备驱动
文章从上层应用访问字符设备驱动开始,一步步地深入分析Linux字符设备的软件层次.组成框架和交互.如何编写驱动.设备文件的创建和mdev原理,对Linux字符设备驱动有全面的讲解.本文整合之前发表的& ...
- Linux字符设备驱动实例—globalmem驱动
1.globalmem虚拟设备实例 globalmem为“全局内存”的意思,在globalmem字符设备中会分配一片大小为GLOBALMEM_SIZE(4KB)的内存空间,并在驱动中提供对这片内存的读 ...
- Linux字符设备驱动基本结构
1.Linux字符设备驱动的基本结构 Linux系统下具有三种设备,分别是字符设备.块设备和网络设备,Linux下的字符设备是指只能一个字节一个字节读写的设备,不能随机读取设备内存中某一数据,读取数据 ...
随机推荐
- AJAX 学习笔记 2017_05_04
1.使用 AJAX 修改该文本内容 <%@ page language="java" contentType="text/html; charset=UTF-8&q ...
- SQL Server 2012安装配置(Part2 )
2 服务器安装 运行安装程序后,首先进入 SQL Server 安装中心.选择左侧导航树中的"安装"菜单项. 图2-1 SQL Server 安装中心 在右侧菜单中点击" ...
- htmlunit模拟登录
htmlunit jar项目路径http://sourceforge.net/projects/htmlunit/files/htmlunit/ demo代码如下 public class AutoL ...
- Sendip 命令行发包工具,支持IP、TCP、UDP等
Sendip是一个linux平台的命令行发数据包工具,目前(2018年2月)支持的协议有ipv4.ipv6.icmp.tcp.udp.bgp.rip.ntp,作者表示其他协议将会后面支持,当他有空写的 ...
- Codeforces 225E 梅森素数
注:梅森素数,数组表示的是2^n-1的n,指数. #include <stdio.h> #include <math.h> ; ; typedef long long ll; ...
- Java中Thread类的join方法到底是如何实现等待
现在的场景是A线程执行:public void run(){ bThread.join(0);//把b线程加入到当前线程(a线程),等待b结束,当前a线程才会结束.}B线程执行public void ...
- java安装以及jdk和jre安装(简单了解)
轻松了解JDK是什么 什么是jdk? JDK是学好Java的第一步.不管是你要学习java编程,还是要搭建jsp web开发环境,或者是android开发环境都离不开它. jdk是什么呢?jdk的是j ...
- 【洛谷P1850】换教室[2016NOIP提高组]
换教室 期望DP 状态: f[i][j][0/1]表示前i节课 提交j个申请 第i个教室不申请/申请(为了确定当前教室,方便转移) 的最小期望 方程: f[i][j][0]=min(f[i-1][j] ...
- 【luogu P2580 于是他错误的点名开始了】 题解
题目链接:https://www.luogu.org/problemnew/show/P2580 我真的永远都爱stl #include <map> #include <cstdio ...
- Dependency Injection in ASP.NET Web API 2 (在web api2 中使用依赖注入)
原文:http://www.asp.net/web-api/overview/advanced/dependency-injection 1 什么是依赖注入(Dependency Injection) ...