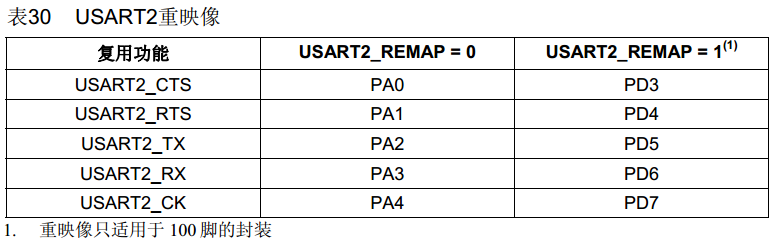
【原创】USART异步模式配置




- RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1 | RCC_APB2Periph_GPIOA,ENABLE);
//初始化USART 1的TX和RX引脚GPIO_InitTypeDef GPIO_Struct;GPIO_Struct.GPIO_Speed = GPIO_Speed_50MHz;//USART TX引脚使用复用推挽输出GPIO_Struct.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_Struct.GPIO_Pin = GPIO_Pin_9;GPIO_Init(GPIOA,&GPIO_Struct);//USART RX引脚使用浮空输入GPIO_Struct.GPIO_Mode = GPIO_Mode_IN_FLOATING;GPIO_Struct.GPIO_Pin = GPIO_Pin_10;GPIO_Init(GPIOA,&GPIO_Struct);
//GPIO、usart配置void USART_GPIO_conf(void){GPIO_InitTypeDef GPIO_Struct;USART_InitTypeDef USART_Struct;//设置之前一定要开启相应的外设时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_USART1,ENABLE);//初始化USART 1的TX和RX引脚GPIO_Struct.GPIO_Speed = GPIO_Speed_50MHz;//USART TX引脚使用复用推挽输出GPIO_Struct.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_Struct.GPIO_Pin = GPIO_Pin_9;GPIO_Init(GPIOA,&GPIO_Struct);//USART RX引脚使用浮空输入GPIO_Struct.GPIO_Mode = GPIO_Mode_IN_FLOATING;GPIO_Struct.GPIO_Pin = GPIO_Pin_10;GPIO_Init(GPIOA,&GPIO_Struct);//设置USART的波特率为9600,接收发送使能,无奇偶校验,1位停止位,8位数据位,无硬件流控USART_Struct.USART_BaudRate =9600;USART_Struct.USART_HardwareFlowControl = USART_HardwareFlowControl_None;USART_Struct.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;USART_Struct.USART_Parity = USART_Parity_No;USART_Struct.USART_StopBits = USART_StopBits_1;USART_Struct.USART_WordLength = USART_WordLength_8b;USART_Init(USART1,&USART_Struct);USART_Cmd(USART1, ENABLE);}

while(USART_GetFlagStatus(USART1, USART_FLAG_RXNE)== RESET);printf("已接受到\n");USART_ClearFlag(USART1,USART_FLAG_RXNE);
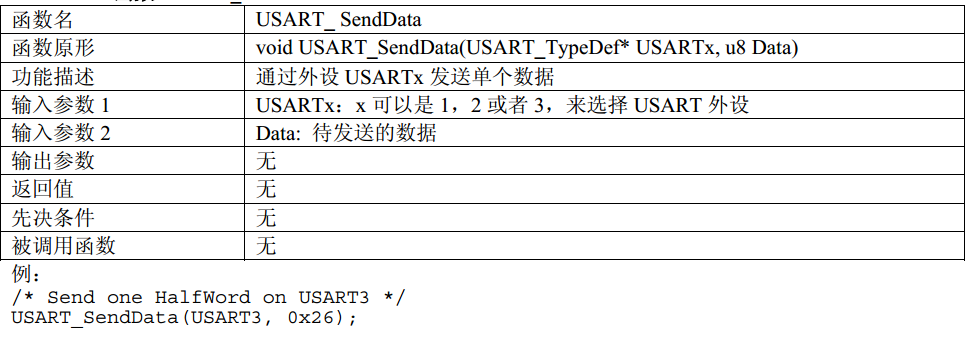
/*发送一个字节数据到USART1 */USART_SendData(USART1,(uint8_t) ch);/*等待发送完毕*/while(USART_GetFlagStatus(USART1, USART_FLAG_TC)== RESET);
附件列表
【原创】USART异步模式配置的更多相关文章
- [原创]STM32 BOOT模式配置以及作用
一.三种BOOT模式介绍 所谓启动,一般来说就是指我们下好程序后,重启芯片时,SYSCLK的第4个上升沿,BOOT引脚的值将被锁存.用户可以通过设置BOOT1和BOOT0引脚的状态,来选择在复位后的启 ...
- STM32学习笔记(五) USART异步串行口输入输出(轮询模式)
学习是一个简单的过程,只要有善于发掘的眼睛,总能学到新知识,然而如何坚持不懈的学习却很困难,对我亦如此,生活中有太多的诱惑,最后只想说一句勿忘初心.闲话不多扯,本篇讲诉的是异步串行口的输入输出,串口在 ...
- 高性能的关键:Spring MVC的异步模式
我承认有些标题党了,不过话说这样其实也没错,关于“异步”处理的文章已经不少,代码例子也能找到很多,但我还是打算发表这篇我写了好长一段时间,却一直没发表的文章,以一个更简单的视角,把异步模式讲清楚. 什 ...
- CDC不同模式在ODI体现系列之二 异步模式
CDC不同模式在ODI体现系列之二 异步模式 2 异步模式需要在数据库中做一些准备工作: 改数据为归档并启用logminer: SQL> shutdown immediate 数据库已经关闭. ...
- Spring MVC的异步模式
高性能的关键:Spring MVC的异步模式 我承认有些标题党了,不过话说这样其实也没错,关于“异步”处理的文章已经不少,代码例子也能找到很多,但我还是打算发表这篇我写了好长一段时间,却一直没发表 ...
- JQuery日记6.5 Javascript异步模式(一)
理解力JQuery前实现异步队列,有必要理解javascript异步模式. Javascript异步其实并不严重格异步感,js使某些片段异步方式在将来运行,流不必等待继续向下进行. 在多线程的语言中最 ...
- Javascript教程:js异步模式编程的4种解决方法
随着人们对网站视觉效果及用户体验的要求越来越高,所以在未来网站的建设中,设计师们开始越来越多的使用了js文件来达到预期的效果,随着js文件的越来越多,令设计师们最头痛的事情也就来了,那就是Javasc ...
- Ansible系列(七):执行过程分析、异步模式和速度优化
本文目录:1.1 ansible执行过程分析1.2 ansible并发和异步1.3 ansible的-t选项妙用1.4 优化ansible速度 1.4.1 设置ansible开启ssh长连接 1.4. ...
- Controller异步模式
转载: https://blog.csdn.net/yingxiake/article/details/51193319 因为服务器请求处理线程的总数是有限的,如果类似的请求多了,所有的处理线程处于阻 ...
随机推荐
- MacBook上那些好用的工具们
https://blog.csdn.net/qq_33833327/article/details/78454703
- css样式表的知识点总结
css总的来说有三种css样式可供选择: 1,行内样式表 行内样式表,直接写在了html文件的元素中,例如: <div style="color:red;"></ ...
- 突破内网限制上网(ssh+polipo)
最近到客户这里来做项目,发现客户对网络的把控实在严格,很多网站都不能访问到,搜索到的技术文档也屏蔽了.突然想到了FQ工具的原理,刚好自己也有台服务器在外头,部署个Polipo代理然后用ssh隧道连接. ...
- Python 虚拟环境 pyenv、venv(pyvenv)、virtualenv之间的区别
请参考连接 https://blog.zengrong.net/post/2167.html https://blog.csdn.net/lanonjj/article/details/5105021 ...
- js监听全屏下的esc事件
window.onresize = function() { if (!checkFull()) { //触发esc事件,执行业务逻辑. } }; function checkFull() { var ...
- SVN客户端操作
版权声明:本文为博主原创文章,转载请注明原文出处. https://blog.csdn.net/zzfenglin/article/details/50937119 下面我们来了解一下SVN客户端 ...
- android-读取MediaProvider
1.MediaProvider存储手机中的媒体文件,用 SQLite 数据库存储图片.视频.音频等多媒体文件的信息,供视频播放器.音乐播放器.图库使用.以 root 权限进入 adb shell,使用 ...
- OC字典的使用
在OC中,字符串.数组.字典是最常见的对象类型,但是在这三个当中,字典的用法相对较少,因为字典的属性和方法比较少,但是一个字典的用法比较复杂,因为在一个字典当中,既可以包含字符串,也可以包含数组,数组 ...
- JObject,JArray的基本操作
引用:https://www.cnblogs.com/dacongge/p/6957074.html 1.JObject:基本的json对象 /// <summary> /// Gets ...
- Redis-09.慢查询
慢查询指的是redis命令的执行时间,不包括网络传输和排队时间. Redis配置文件redis.conf中描述慢查询相关的选项在SLOW LOG部分 ######################### ...