SLAM+语音机器人DIY系列:前言
------SLAM+语音机器人DIY系列【目录】快速导览------
第1章:Linux基础
第2章:ROS入门
第3章:感知与大脑
第4章:差分底盘设计
第5章:树莓派3开发环境搭建
第6章:SLAM建图与自主避障导航
2.google-cartographer机器人SLAM建图
第7章:语音交互与自然语言处理
第8章:高阶拓展
2.centos7下部署Django(nginx+uwsgi+django+python3)
----------------文章将持续更新,敬请关注-----------------
如果大家对博文的相关类容感兴趣,或有什么技术疑问,欢迎加入下面的《SLAM+语音机器人DIY》QQ技术交流群,一起讨论学习^_^

----------------【了解miiboo机器人,发现更多精彩】----------------


----------------【miiboo机器人,视频教程,精彩不止于此】----------------



SLAM+语音机器人DIY系列:前言的更多相关文章
- SLAM+语音机器人DIY系列:(六)SLAM建图与自主避障导航——2.google-cartographer机器人SLAM建图
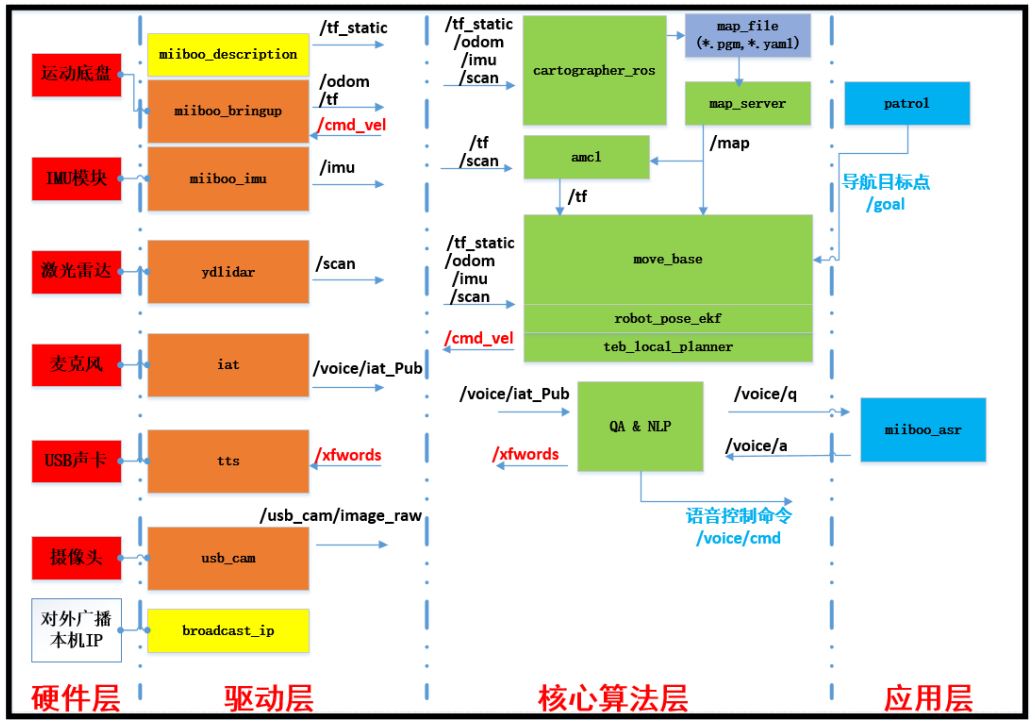
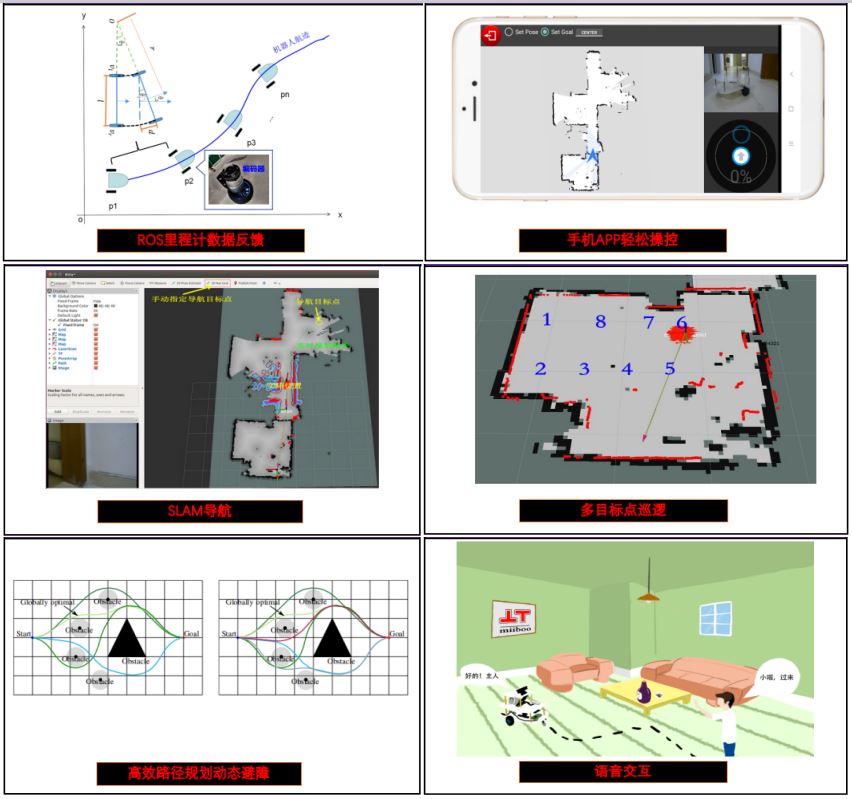
摘要 通过前面的基础学习,本章进入最为激动的机器人自主导航的学习.在前面的学习铺垫后,终于迎来了最大乐趣的时刻,就是赋予我们的miiboo机器人能自由行走的生命.本章将围绕机器人SLAM建图.导航避障 ...
- SLAM+语音机器人DIY系列:(五)树莓派3开发环境搭建——1.安装系统ubuntu_mate_16.04
摘要 通过前面一系列的铺垫,相信大家对整个miiboo机器人的DIY有了一个清晰整体的认识.接下来就正式进入机器人大脑(嵌入式主板:树莓派3)的开发.本章将从树莓派3的开发环境搭建入手,为后续ros开 ...
- SLAM+语音机器人DIY系列:(一)Linux基础——1.Linux简介
摘要 由于机器人SLAM.自动导航.语音交互这一系列算法都在机器人操作系统ROS中有很好的支持,所以后续的章节中都会使用ROS来组织构建代码:而ROS又是安装在Linux发行版ubuntu系统之上的, ...
- SLAM+语音机器人DIY系列:(一)Linux基础——2.安装Linux发行版ubuntu系统
摘要 由于机器人SLAM.自动导航.语音交互这一系列算法都在机器人操作系统ROS中有很好的支持,所以后续的章节中都会使用ROS来组织构建代码:而ROS又是安装在Linux发行版ubuntu系统之上的, ...
- SLAM+语音机器人DIY系列:(一)Linux基础——3.Linux命令行基础操作
摘要 由于机器人SLAM.自动导航.语音交互这一系列算法都在机器人操作系统ROS中有很好的支持,所以后续的章节中都会使用ROS来组织构建代码:而ROS又是安装在Linux发行版ubuntu系统之上的, ...
- SLAM+语音机器人DIY系列:(二)ROS入门——1.ROS是什么
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- SLAM+语音机器人DIY系列:(二)ROS入门——2.ROS系统整体架构
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- SLAM+语音机器人DIY系列:(二)ROS入门——3.在ubuntu16.04中安装ROS kinetic
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- SLAM+语音机器人DIY系列:(二)ROS入门——4.如何编写ROS的第一个程序hello_world
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
随机推荐
- spring + junit 测试
spring + junit 测试 需要一个工具类 package com.meizu.fastdfsweb; import org.junit.runner.RunWith; import org. ...
- webpack-dev-server 和 html-webpack-plugin的使用
webpack-dev-server的作用:自动编译 1.webpack-dev-server的使用 1)cnpm i webpack-dev-server -D 2)在package.json中配置 ...
- int的最大最小值补码原码转换
原码 正数的二进制表示即为原码(正数的原码.反码.补码均一致) 补码 负数的补码为符号位不变,其余为取反,然后加1 补码的设计目的 (原因:带符号的数加减失效) 1.使符号位能够参与加减运算 2.将减 ...
- P1121 环状最大两段子段和(DP)
P1121 环状最大两段子段和 难度 提高+/省选- 题目描述 给出一段环状序列,即认为A[1]和A[N]是相邻的,选出其中连续不重叠且非空的两段使得这两段和最大. 输入输出格式 输入格式: 输入文件 ...
- HDU 6154 CaoHaha's staff(2017中国大学生程序设计竞赛 - 网络选拔赛)
题目代号:HDU 6154 题目链接:http://acm.hdu.edu.cn/showproblem.php?pid=6154 CaoHaha's staff Time Limit: 2000/1 ...
- [笔记]nginx配置反向代理和负载均衡
1.nginx配置文件:源码安装情况下,nginx.conf在解压后的安装包内.yum安装,一般情况下,一部分在/etc/nginx/nginx.conf中,一部分在/etc/nginx/conf.d ...
- python3笔记二十一:时间操作datetime和calendar
一:学习内容 datetime calendar 二:datetime 1.模块说明:可以理解为datetime基于time进行了封装,提供了各种使用的函数,datetime模块的接口更直接,更容易调 ...
- 在.slurm文件中激活Anaconda环境
超算中心使用slurm作为集群调度.原始slurm脚本如下: source activate tensorflow-gpu python neural_style.py --content conte ...
- Python 之 subprocess模块
一.subprocess以及常用的封装函数运行python的时候,我们都是在创建并运行一个进程.像Linux进程那样,一个进程可以fork一个子进程,并让这个子进程exec另外一个程序.在Python ...
- SpringMVC @ResponseBody返回中文乱码
SpringMVC的@ResponseBody返回中文乱码的原因是SpringMVC默认处理的字符集是ISO-8859-1, 在Spring的org.springframework.http.conv ...