Linux 内核层和 用户层 配置 GPIO 引脚
Linux BSP 开发的基础就是和GPIO打交道, 下面总结下这几天对某家开发板的GPIO控制的知识。
公司的开发板用的是 DTB 模式 ,首先,进入 dts,dtsi文件查看关于GPIO 的模块。
soc {
.
.
.
gpio0: gpio@****addr {
compatible = "**********";
reg = < 0x****addr 0x50>;
interrupts = <SPI IRQ_TYPE_LEVEL_HIGH>;
#gpio-cells = <>;
gpio-controller;
gpio-ranges = <&pfc >;
#interrupt-cells = <>;
interrupt-controller;
clocks = <&cpg CPG_MOD >;
power-domains = <*****>;
};
.
.
.
};
可以看到 GPIO 节点 挂在 SOC node 下 ,手上这块开发板 把GPIO分成了8个 bank : gpio0 - gpio7
reg =<0 地址 0 长度>
#gpio-cells =<2> 表示 要用2个cell描述一个 GPIO引脚
如 I2C中定义 : pwd-gpios = <&gpio6 7 GPIO_ACTIVE_HIGH>;
表示 bank 6 的gpio 用 2个cell 描述 :7,GPIO_ACTIVE_HIGH (7表示bank 6 下的第七个引脚一般是 GP 6_07表示 ;GPIO_ACTIVE_HIGH则为高电平有效)
gpio-controller; interrupt-controller; 表示 bank 0 下的引脚 既可以作为中断引脚 ,也可以作为 通用的GPIO引脚
gpio-ranges = <&pfc 0 0 16>; 表示 bank 0下有16个 GPIO引脚
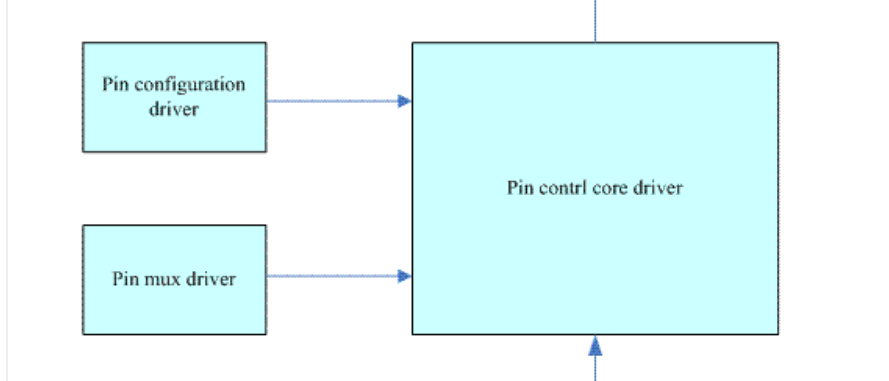
GPIO 使用 pinctrl 方式来驱动 ,pin control subsystem 会 :
1. 枚举所有可用的pin 脚 ,于是每个引脚就有的唯一的 ID (num) ,这个ID 很关键,对于以后的操作。
enum {
PINMUX_RESERVED = ,
PINMUX_DATA_BEGIN,
GP_ALL(DATA), /* add GP_0_1_DATA ,GP_0_1_DATA..... */
PINMUX_DATA_END,
#define F_(x, y)
.....
}
2.管理 这些Pin脚的, 由于pin 可以复用 比如 SPI 和GPIO 复用一个pin脚 如: GP2_08 / MISO,于是引申出 pin group 和 pin functon 两个概念:
i2c2_pins: i2c2 {
groups = "i2c2_a";
function = "i2c2";
};
在dts 中如上所示 ,其中 i2c2_a 在 pinctl 源码中 如下所示,i2c的两根引脚使用 GP5_0 ,GP5_4.
static const unsigned int i2c2_a_pins[] = {
/* SDA, SCL */
GP_PIN(, ),GP_PIN(, ),
};
function 如下 :
struct sh_pfc_function {
const char *name;
const char * const *groups;
unsigned int nr_groups;
};
#define SH_PFC_FUNCTION(n = i2c2) \
{ \
.name = #n, \
.groups = n##_groups, \
.nr_groups = ARRAY_SIZE(n##_groups), \
}
好了 ,基本概念就先写这么多 。
内核层配置 GPIO
在 写内核驱动的时候 如果希望配置某个GPIO引脚 , 可以在dts中 添加: pwd-gpios = <&gpio0 7 GPIO_ACTIVE_HIGH>;
在 driver 代码中 , 需要包含 #include <linux/gpio.h>使用 :
gpio_id = of_get_named_gpio(your_driver->dev->of_node,"pwd-gpios", 0);
获取 GP0_07的 ID号 ,然后申请 一个GPIO 操作对象。
if (gpio_is_valid(gpio_id)) //判断一个IO是否合法
devm_gpio_request_one(&platform_device->dev, gpio_id,GPIOF_OUT_INIT_LOW, name);
设置GPIO的方向,如果是输出同时设置电平:
/* set as input or output, returning 0 or negative errno */
int gpio_direction_input(unsigned gpio);
int gpio_direction_output(unsigned gpio, int value);
获取输入引脚的电平:
/* GPIO INPUT: return zero or nonzero */
int gpio_get_value(unsigned gpio);
设置输出:
void gpio_set_value(unsigned gpio, int value);
释放申请的GPIO对象
void gpio_free(unsigned gpio);
将GPIO映射为IRQ中断:
/* map GPIO numbers to IRQ numbers */
int gpio_to_irq(unsigned gpio);
/* map IRQ numbers to GPIO numbers (avoid using this) */
int irq_to_gpio(unsigned irq);
设置GPIO IRQ中断类型:
set_irq_type(gpio_to_irq( gpio), IRQ_TYPE_EDGE_FALLING);
用户层配置 GPIO
需要确认 内核 menuconfig 中 Device Drivers -》 GPIO Support 设 y .
在 /sys/class/gpio 目录下如下所示 :
root@salvator-x:/sys/class/gpio# ls
export gpiochip361 gpiochip419 gpiochip453 gpiochip496
gpiochip357 gpiochip393 gpiochip437 gpiochip468 unexport
gpiochip 后面的数字 是每个bank 的基地址 也就是 GP0 对应 gpiochip468
那么 GP0_07 的 ID 就是 468 + 7 ;(可能不同的内核版本,或者 开发板不一样 )通过 :
root@salvator-x:/sys/class/gpio# echo > export
会对应生成 gpio475 目录
root@salvator-x:/sys/class/gpio/gpio475# ls
active_low device direction edge power subsystem uevent value
通过
root@salvator-x:/sys/class/gpio/gpio475# echo >value
root@salvator-x:/sys/class/gpio/gpio475# echo >value
root@salvator-x:/sys/class/gpio/gpio475# echo "in" > direction
root@salvator-x:/sys/class/gpio/gpio475# echo "out" > direction
来控制输出输入 ,电平高低 。
最后,关于 Pinctrl 的内容还有太多要写,就先写到这把。。。。。
来不及写 参考文档了,具体是 结合 wowotech 和 公司的设备,要下班了。。。
ADD :..........................................................................
获取GPIO不同组 基地址的 bash 命令 :
for i in gpiochip* ; do echo `cat $i/label`: `cat $i/base` ; done
Linux 内核层和 用户层 配置 GPIO 引脚的更多相关文章
- 【windows 操作系统】【CPU】用户模式和内核模式(用户层和内核层)
所有的现代操作系统中,CPU是在两种不同的模式下运行的: 注意以下内容来自微软: windows用户模式和内核模式 运行 Windows 的计算机中的处理器有两个不同模式:用户模式 和内核模式 . 用 ...
- linux内核空间与用户空间信息交互方法
linux内核空间与用户空间信息交互方法 本文作者: 康华:计算机硕士,主要从事Linux操作系统内核.Linux技术标准.计算机安全.软件测试等领域的研究与开发工作,现就职于信息产业部软件与 ...
- linux内核态和用户态的信号量
在Linux的内核态和用户态都有信号量,使用也不同,简单记录一下. 1> 内核信号量,由内核控制路径使用.内核信号量是struct semaphore类型的对象,它在中定义struct sema ...
- Linux内核态和用户态
两张图说明Linux内核态和用户态之间的关系
- 向Windows内核驱动传递用户层定义的事件Event,并响应内核层的通知
完整的程序在下载:http://download.csdn.net/detail/dijkstar/7913249 用户层创建的事件Event是一个Handle句柄,和内核中的创建的内核模式下的KEV ...
- Linux内核驱动学习(八)GPIO驱动模拟输出PWM
文章目录 前言 原理图 IO模拟输出PWM 设备树 驱动端 调试信息 实验结果 附录 前言 上一篇的学习中介绍了如何在用户空间直接操作GPIO,并写了一个脚本可以产生PWM.本篇的学习会将写一个驱动操 ...
- enc28j60网卡驱动模块添加进linux内核,Kconfig,Makefile配置过程
这里是要把http://www.cnblogs.com/hackfun/p/6260396.html中的enc28j60网卡驱动模块,添加到2.6.22.6内核中,这个模块代码不需要任何修改.只需要在 ...
- Linux内核中断引入用户空间(异步通知机制)【转】
转自:http://blog.csdn.net/kingdragonfly120/article/details/10858647 版权声明:本文为博主原创文章,未经博主允许不得转载. 当Linux内 ...
- Linux内核驱动学习(六)GPIO之概览
文章目录 前言 功能 如何使用 设备树 API 总结 前言 GPIO(General Purpose Input/Output)通用输入/输出接口,是十分灵活软件可编程的接口,功能强大,十分常用,SO ...
随机推荐
- 【WINDOWS】设置路由表实现有线内网,无线外网
前提!!! 需要有线无线双网卡
- Numpy基础(数组创建,切片,通用函数)
1.创建ndarray 数组的创建函数: array:将输入的数据(列表,元组,数组,或者其他序列类型)转换为ndarray.要么推断出dtype,要么显式给定dtype asarray:将输入转换为 ...
- Java继承和多态-Static关键字
1. 什么是Static 关键字? Static 能够与变量,方法和类一起使用,称为静态变量,静态方法.如果在一个类中使用static修饰变量或者方法的话,它们可以直接通过类访问,不需要创建一个类的对 ...
- 在Ubuntu16.04下安装SourceInsight和WeChat
1 使用Wine安装SourceInsight4 1.1 安装Wine $ sudo apt-get install wine 1.2 安装SourceInsight 下载SourceInsight软 ...
- Mysql中主键与索引
摘自: https://www.cnblogs.com/wicub/p/5898286.html 一.什么是索引?索引用来快速地寻找那些具有特定值的记录,所有MySQL索引都以B-树的形式保存.如果没 ...
- Fabric基础架构原理(二)
Fabric 的网络节点本质上是互相复制的状态机,节点之间需要保持相同的账本状态.为了实现这个目的,各个节点需要通过共识( consensus )过程,对账本状态的变化达成一致性的认同. Fabric ...
- ORA-00346,借助_allow_resetlogs_corruption开库
Mon Aug 06 10:15:08 2018Errors in file /data/app/oracle/diag/rdbms/prod/prod/trace/prod_ora_6831.trc ...
- 图论&线性基(?)(8.12)
边没有负权,最短路最多只有n条边 很暴力的思想: 先跑一遍最短路,找出最短路上的边,枚举每条边,翻倍,放进原图再跑一遍.取最大值 好熟悉啊 分层建图,建k层 每层内部是原图 若原图中u到v有连边,则由 ...
- 阶段1 语言基础+高级_1-2 -面向对象和封装_15练习使用private关键字定义
练习使用private关键字定义一个学生类.通过这个联系说明一种特殊情况 先定义了name个age分别再定义getter和setter的方法 boolean类型的getter方法不能叫做get开头的. ...
- Free Pascal User’s Guide
https://www.freepascal.org/docs-html/current/user/user.html