【基础整理】Mapping representation 机器人所用地图种类及相关介绍
参考与前言
本文主要介绍 建图 Mapping 方面的一些 基础知识介绍与相关下游任务使用
涉及知识较为基础,SLAM大佬们可以提前退出了 主要针对应用为移动机器人与物流无人驾驶车;提前申明:大部分文字/图片,翻译/截图于 来自 Introduction to Mobile Robotics, Techniques for 3D Mapping, Wolfram Burgard 的PPT内容 阿里云盘下载链接
部分图片/文字 参考如下,同时会在文中进行再次标注:
- PPT from Introduction to Mobile Robotics, Techniques for 3D Mapping, Wolfram Burgard,原链接,阿里云盘链接
- 相关 mapping, voxel 总结 github readme: meshula/awesome-voxel
- 其他相关代码举例 见原文提及处
- 大部分移动机器人, 比如两轮差速、机器狗平面运动等 大多使用的是2D occupancy map
- 自动驾驶定位中,我们常用传感器的点云信息进行建点云地图,这一点主要用于定位,注意点云并不能直接的被规划使用
- 自动驾驶运动规划避障中,简单来操作,会生成以自车为中心的局部栅格地图;正经操作则是有分模块,对障碍物进行检测,然后再根据检测结果进行运动规划;更正经的操作则是有检测、跟踪、预测 三模块进行,但这一部分并不在本文的讨论内容中
本文主要是介绍相关的mapping 表达方式,常用的数据结构形式 打开目录看更佳
Motivation
为什么我们需要一种3维的表达来做maps:WHY 3D representation?
- 机器人 在我们所生活的三维的世界中 => 需要一种机器使用的地图方式
- 当然2D maps也能被导航比如定位任务所使用
- 给下游任务使用,比如collision avoidance 和运动规划
Representations
常用表达方式 Representations
- Point clouds 通常由激光雷达传感器所直接获得
- Voxel grids 接收传感器数据后进行一些操作
- TSDF 投影到最近平面的距离,多帧点云加权平均, SDF/ESDF
- Surface maps
- Meshes
- ...
Point Clouds 点云

由PPT截图可知,点云不需要在对收集到的数据进行离散化等,而且点云的范围可以很大;当然这一类数据类型 很难直接被下游任务所使用,主要原因是 没有直接的 free/unknown 区域的表示
通常使用的传感器有16,32,64,128线的 各种激光雷达,相关建图算法也很多:最为简单的是由Autoware直接开源出的ndt_mapping模块,此处为抽取模块下的代码链接:gitee 抽取 mapping_ws
其他的也有配合GPS, IMU等进行的融合,也有加入了回环 loop detection、动态障碍物剔除、配合相机上色等,比如 LIO_SAM_6AXIS,FSAT-LIO 等等等
Truncated Signed Distance Field (TSDF)
一种3d voxel array的表达方式,常用于3d voxel的建立步骤之中,比如voxblox,vdbmapping等,更多可见3d voxel grids部分
A Truncated Signed Distance Field (TSDF) is a 3D voxel array representing objects within a volume of space in which each voxel is labeled with the distance to the nearest surface
参考于:https://rosindustrial.org/news/tag/TSDF
相关算法:ros-industrial/yak which is a library for integrating depth images into Truncated Signed Distance Fields (TSDFs)
3D Voxel Grids

这个就是由点云地图进行后续操作而生成的,有了volumetric的表示,同时可以根据 收集数据时间等概率更新地图,相关的算法为 ethz-asl/voxblox 更多请参考2 链接:awesome-voxel。此地图 通常在 无人机 行业使用更多一点,也可以走到下游进行使用,当然pcl库里也有直接的voxelgrid函数进行使用,但一般是用来降采样点云中的点的,比如如下代码:
pcl::VoxelGrid<pcl::PointXYZI> voxel_grid_filter;
voxel_grid_filter.setLeafSize(filter_res, filter_res, filter_res);
voxel_grid_filter.setInputCloud(map_ptr);
voxel_grid_filter.filter(*map_filtered);
std::cout << "Original: " << map_ptr->points.size() << " points." << std::endl;
std::cout << "Filtered: " << map_filtered->points.size() << " points." << std::endl;
pcl::toROSMsg(*map_filtered, *map_msg_ptr);
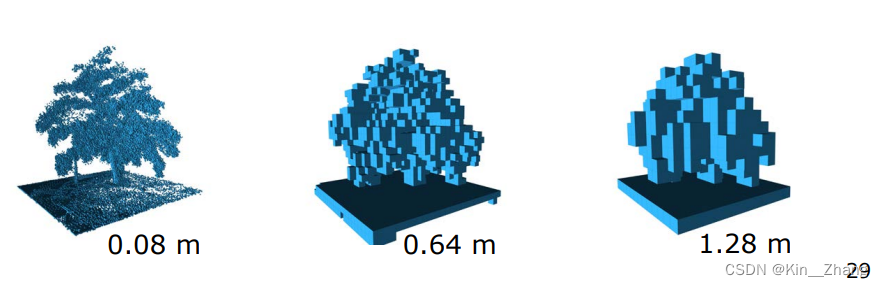
需要注意的是,voxel的分辨率选择 很大程度会影响整体建图的效率和好坏,如下截图:
更多相关建图:octoMap/octomap,
2.5D Maps/Elevation maps

也就是说elevation maps 对比3D是一种2.5D的表达,然后可以根据概率进行高度的根据,这个grid_map有直接集成到ros的插件,由ETH Marco 组提出的,后续转到了ANYbotics下面repo,如参考三链接 ANYbotics/grid_map,正常full-ros会自动下载这个包,也可以pull下来进行源码安装
可以通过point clouds直接进行转换,也可以通过其他传感器 自己定义更新方式即可,较为常用于 机器狗领域
相关算法推荐:ANYbotics/elevation_mapping,leggedrobotics/elevation_mapping_cupy
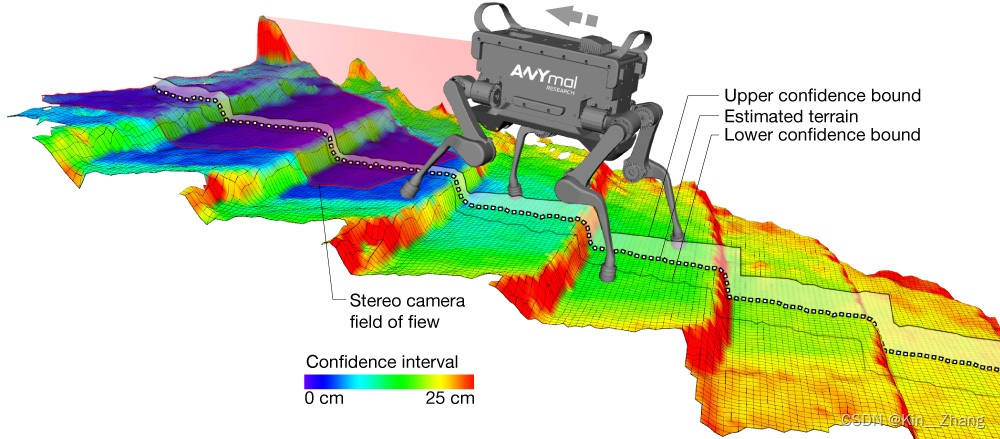
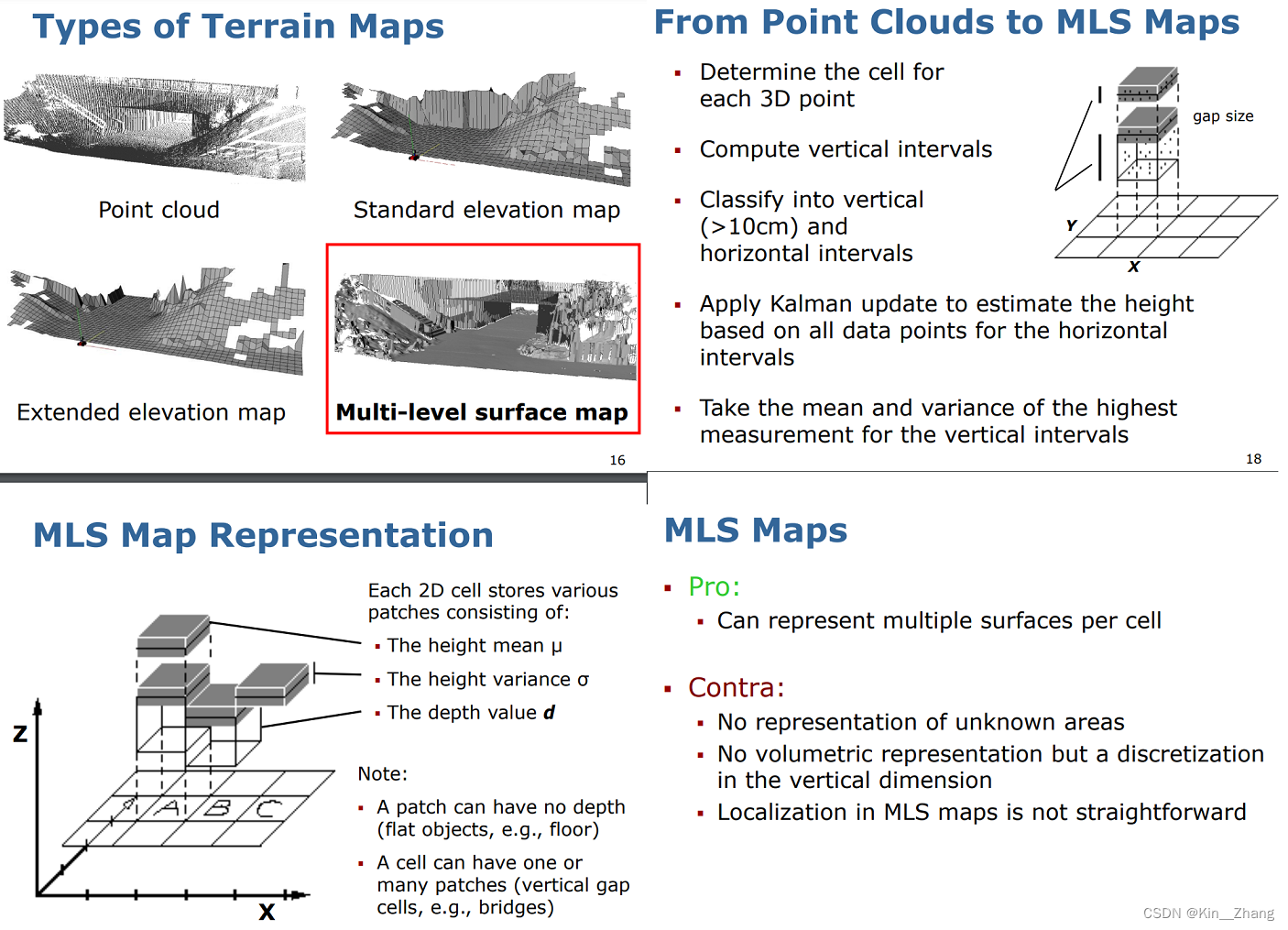
但是因为一个格子只能出一个高度值,所以遇到桌子、桥等 就无法进行比较好的表达,比如这样:

然后就有了extended elevation maps

Others
比如MLP,multi-layer surface等,见原文ppt 见开头参考链接
还有ESDF,Euclidean signed distance field,通常用于planning模块中,相关可参考:【基础计算】ESDF栅格距离图计算并行加速版 (附源码)

Structure
主要建图中使用存储数据结构,比如八叉树、kdtree,vdb,Hash
Octree
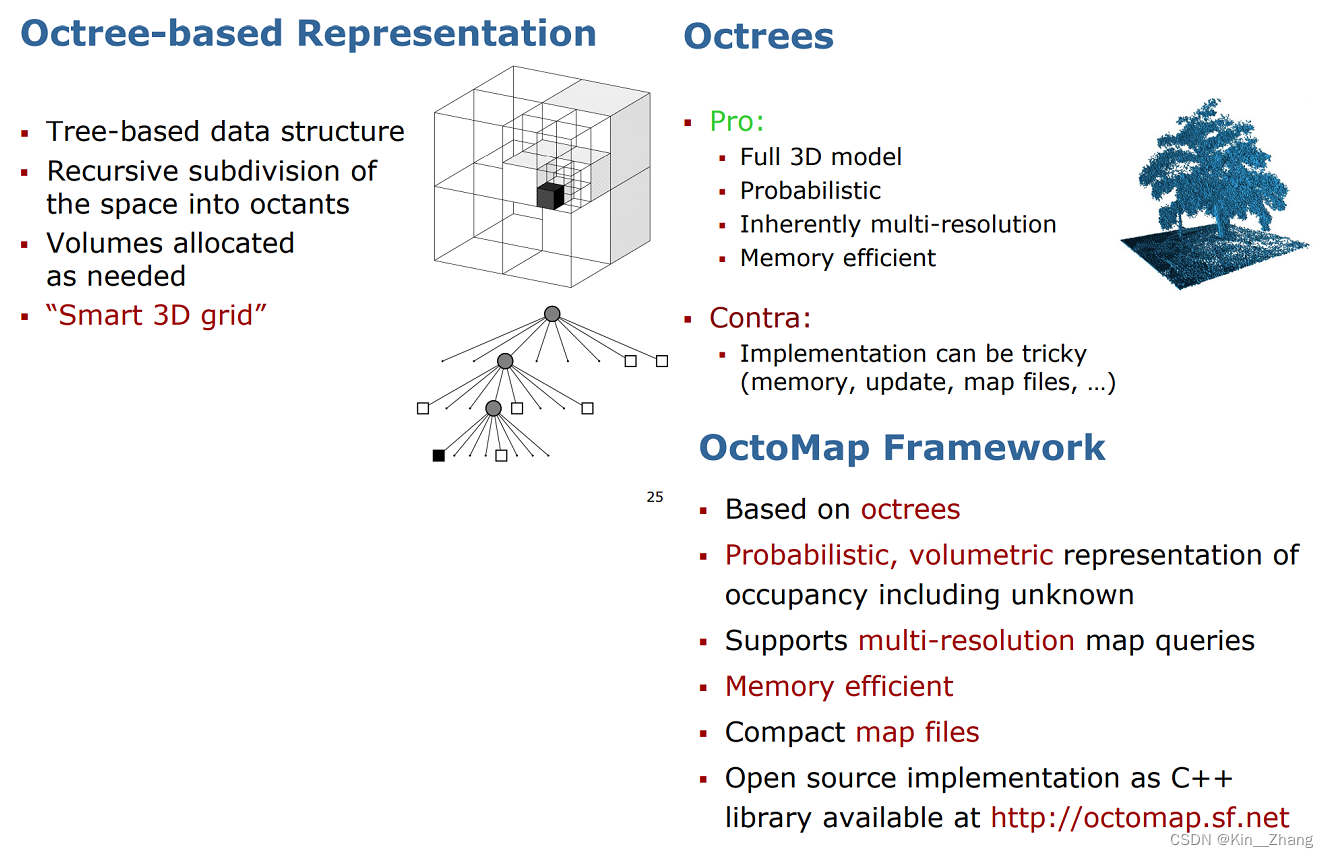
大多数时候都可以使用别人已经搭好的轮子,尽量不要重复造轮子,但是我看的几个好像都自己写了一遍 ... octree相关头文件和cpp,可能是自定义一些其他的函数进整体类中
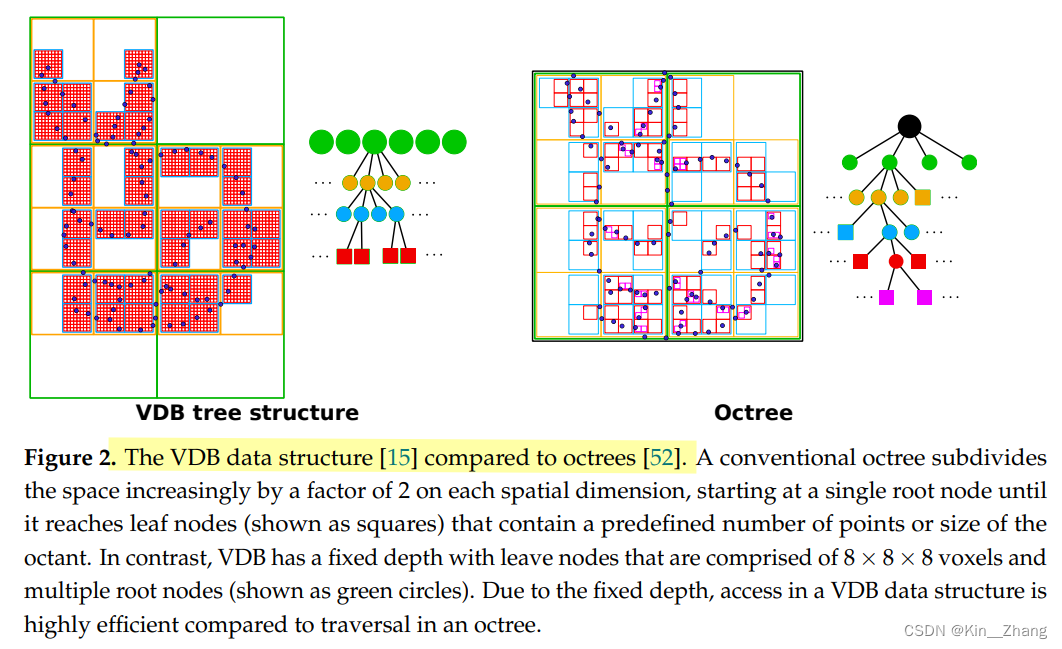
VDB
更多参考见论文:VDBFusion: Flexible and Efficient TSDF Integration of Range Sensor Data,以下为论文中图片截图
相关提及代码:AcademySoftwareFoundation/openvdb,PRBonn/vdbfusion
碎碎念
Mapping 还有关于动态障碍物去除的一些工作,可见 这个repo:zhuhu00/Awesome_Dynamic_SLAM 很详细的列举了相关主流mapping的去除动态障碍物方法,包含学习、传统和概率更新类
当然上面的都是比较基础介绍,更多了解需要跳转相关的代码/论文。如若上述有什么不对的地方,请及时指正/补充,感谢~
赠人点赞 手有余香 ;正向回馈 才能更好开放记录 hhh
【基础整理】Mapping representation 机器人所用地图种类及相关介绍的更多相关文章
- iOS中滤镜种类及相关介绍
- 机器学习 —— 基础整理(六)线性判别函数:感知器、松弛算法、Ho-Kashyap算法
这篇总结继续复习分类问题.本文简单整理了以下内容: (一)线性判别函数与广义线性判别函数 (二)感知器 (三)松弛算法 (四)Ho-Kashyap算法 闲话:本篇是本系列[机器学习基础整理]在time ...
- MySQL基础整理(一)之SQL基础(未完成)
大家好,我是浅墨竹染,以下是MySQL基础整理(一)之SQL基础 1.SQL简介 SQL(Structure Query Language)是一种结构化查询语言,是使用关系模型的数据库应用语言. 2. ...
- nutch的一些基础整理
nutch的一些基础整理 原创 2015年03月22日 18:18:01 标签: nutch / 240 编辑 删除 一.关于配置文件: nutch-default.xml:爬虫的默认配置.在${nu ...
- [转帖]nginx基础整理
nginx基础整理 https://www.cnblogs.com/guigujun/p/6588545.html 目录结构如下: Nginx基础知识 Nginx HTTP服务器的特色及优点 Ngin ...
- 必杀技———SQL基础整理系列(一)
SQL(Structured Query Language)——结构化查询语言 SQL语言的组成部分 数据定义语言 (DDL:Data Definition Language) 负责数据结构定义与数据 ...
- 【个人笔记】002-PHP基础-01-PHP快速入门-02-PHP语言相关介绍输
002-PHP基础-01-PHP快速入门 02-PHP语言相关介绍 1.PHP是什么 Hypertext Preprocessor超文本预处理器 是一种通用开源脚本语言 Personal Home P ...
- python爬虫主要就是五个模块:爬虫启动入口模块,URL管理器存放已经爬虫的URL和待爬虫URL列表,html下载器,html解析器,html输出器 同时可以掌握到urllib2的使用、bs4(BeautifulSoup)页面解析器、re正则表达式、urlparse、python基础知识回顾(set集合操作)等相关内容。
本次python爬虫百步百科,里面详细分析了爬虫的步骤,对每一步代码都有详细的注释说明,可通过本案例掌握python爬虫的特点: 1.爬虫调度入口(crawler_main.py) # coding: ...
- Java并发包中线程池的种类和特点介绍
Java并发包提供了包括原子量.并发集合.同步器.可重入锁.线程池等强大工具这里学习一下线程池的种类和特性介绍. 如果每项任务都分配一个线程,当任务特别多的时候,可能会超出系统承载能力.而且线程的创建 ...
- Xamarin.FormsShell基础教程(7)Shell项目关于页面的介绍
Xamarin.FormsShell基础教程(7)Shell项目关于页面的介绍 轻拍标签栏中的About标签,进入关于页面,如图1.8和图1.9所示.它是对应用程序介绍的页面. 该页面源自Views文 ...
随机推荐
- 11K+ Star!图解计算机网络、操作系统、计算机组成、数据库!
大家好,我是 Java陈序员. 俗话说得好,面试造火箭,入职拧螺丝.我们在工作中,其实很少用到一些计算机底层知识,往往只要编码完事.但是,知其然还要知其所以然,我们不仅要做一个合格的"CV ...
- 国外anonfiles网盘大文件下载器
各位注意了,这个网站很久以前是可以国内直接访问的,后来被墙了,但仍然可以使用代理下载,现如今,6天前大概2023年8月10号左右这个网站已经挂了,就是彻底不能用了,所有与之有关的东西比如网页,都是假的 ...
- AI 编译器CINN中的OpLowering优化Pass
一.Lower 主逻辑 在 OpLower::Lower() 接口中,主要分为两大类: Elementwise类,主要涉及的 OpPattern 包括:kElementwise .kBroadcast ...
- C语言:删除顺序表中重复的信息—(删除顺序表中重复的单词)
如何删除顺序表中的重复单词: (开始看内容之前容朕说一句:如果你最后怎么都运行不了你想要的结果,①我敢保证大概率是你的下标越界你的下标越界了你的下标越界了.②在我这程序里面你肯定打少了p--,少了p- ...
- IPv6 — 实践
目录 文章目录 目录 前文列表 常用命令 开启/关闭 IPv6 支持 在 CentOS7 上配置 IPv6 地址 自动获取链路本地地址 配置静态全球唯一地址 配置临时 IPv6 地址 添加 IPv6 ...
- PCF 的 Npcf_PolicyAuthorization 服务化接口
目录 文章目录 目录 引用 前文列表 术语 PCF Npcf_PolicyAuthorization 服务化操作类型 服务化接口参数类型 创建 Application Session Context: ...
- 当面试官问出“Unsafe”类时,我就知道这场面试废了,祖坟都能给你问出来!
一.写在开头 依稀记得多年以前的一场面试中,面试官从Java并发编程问到了锁,从锁问到了原子性,从原子性问到了Atomic类库(对着JUC包进行了刨根问底),从Atomic问到了CAS算法,紧接着又有 ...
- web开发遇到的坑之360浏览器缓存问题
再使用360浏览器,浏览我自己开发的一个配置的web管理后台时,发现,使用ctrl+F5都不能刷新表格的数据,还有,我添加字段时,明明是添加成功的,用sql再数据库查都能查出来.但表格里就是不显示.我 ...
- latex图片格式问题解决(viso转PDF转eps)
latex图片格式问题解决(viso->PDF->eps) 1.viso绘图 如何让界面自动适应图的大小? 设计->大小->适应绘图 如何将VISIO图转换为PDF? 文件-& ...
- vscode开发一个luaIDE插件
基础知识 环境准备 node.js 下载后下一步下一步即可安装成功,推荐LTS版本 yeoman 脚手架工具,也就是快速帮你新建一个插件所需的目录的工具,在工作目录下cmd,输入下列命令即可安装 np ...