协同导航定位技术:为GPS定位盲区而生
导航技术和我们的生活息息相关。行人导航系统是一种为行人提供导航服务的便携式设备,可以适应地下、矿洞等卫星信号拒止的地区,以及大商场等拓扑结构复杂的地区,通常基于MIMU实现,本质上是惯性导航系统的一种。由于采用了 MIMU器件,行人导航系统也面临精度差和误差累积的问题。因此提高行人导航系统的精度、约束误差发散是行人导航领域的热门研究方向。
协同导航技术是提高行人导航精度的一种方案,通过多智能体系统进行节点间导航状态共享、节点间信息测量或者节点位置信息及不确定性信息存储转发的方式来提高各个节点的导航精度。
包含行人节点和无人车节点的多智能体系统是一类典型的异构多智能体系统。无人车通常可以搭载丰富的导航设备,比如相机、雷达、GNSS、高精度惯性传感器等,具有较高的导航精度。此时在行人节点和无人车节点间运用协同导航技术,可以有效提升行人节点的导航精度,从而提升多智能体系统整体的任务能力。
哈尔滨工业大学的研究人员针对人车协同导航,提出了基于因子图理论的协同导航系统模型,并引入遗传算法对导航状态进行寻优完成信息融合。
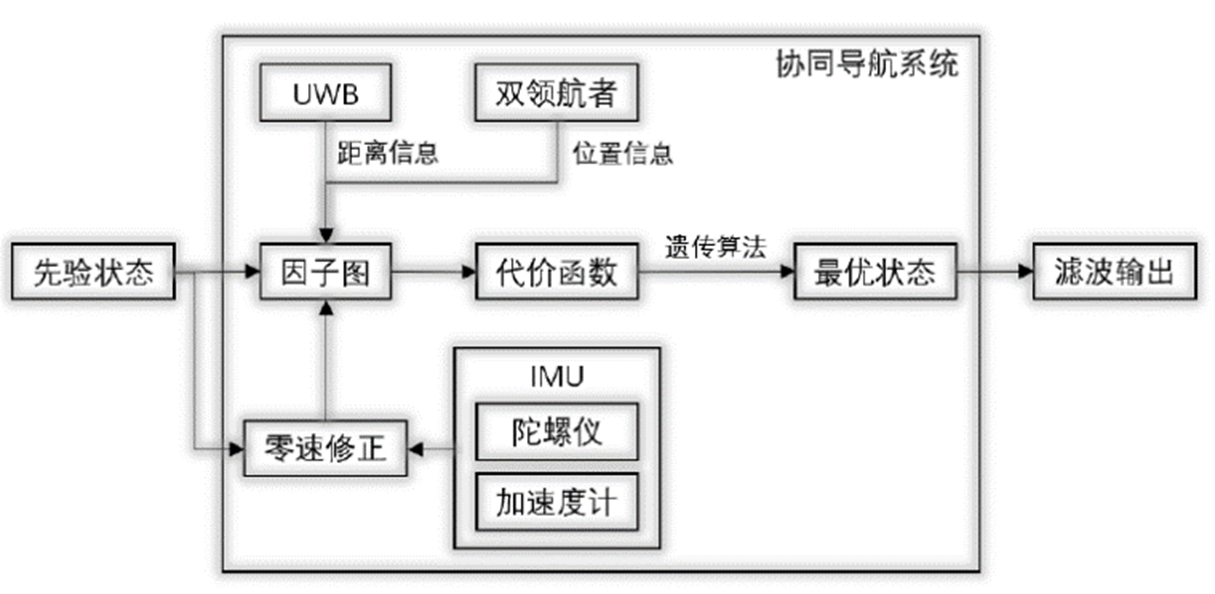
图1-协同导航系统整体架构图
系统中两个节点由高导航精度的无人车构成,一个跟随节点由行人导航体统构成。行人导航节点配备了一个基于 MEMS 技术的惯性测量单元用于测量行人足部的惯性信息。无人车节点相对于导航坐标系的三维位置信息由外部设备提供。无人车和行人导航节点上均配备了 UWB 测距设备,用于测量行人和无人车之间的距离。
图2-粘贴了反光标识点的UWB基站
为了验证基于因子图和遗传算法的协同导航算法,研究人员进行了行走导航实验,实验中,由两个UWB基站充当双领航者(替代无人车),其实时位置信息由NOKOV度量动作捕捉系统提供。行人节点配备MIMU与UWB标签,可以对行人节点的机体角速度、机体加速度以及与两个领航节点间的距离进行测量。

图3-NOKOV动作捕捉系统
实验中共进行49.7m里程的行走,在行走过程中,MIMU 测量行人足部的机体角速度与加速度,UWB 器件测量行人足部与双领航者之间的距离信息,利用协同导航算法对行人节点的导航状态进行解算。由于NOKOV度量动作捕捉系统定位精度高,达到亚毫米级,实验中将其获取的定位信息作为行人的真实轨迹值。
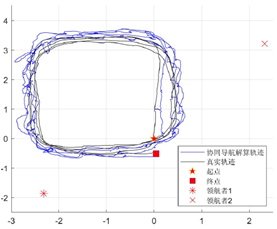
图4-协同导航算法解算轨迹图
实验通过对比协同导航算法解算的行人节点轨迹值和NOKOV度量动作捕捉系统提供的真实轨迹值,完成了算法的有效性和精确度检验。蓝色轨迹为协同导航算法解算的行人节点轨迹值,黑色轨迹为动作捕捉系统提供的真实轨迹,实验验证结论可得行走终点误差为0.0648米,相对行走里程的误差率为0.13%,符合算法有效性验证预期结果。
参考文献:[1]黄灿. 基于因子图的人车协同导航算法[D].哈尔滨工业大学,2021.
协同导航定位技术:为GPS定位盲区而生的更多相关文章
- 如何利用【百度地图API】进行定位?非GPS定位
原文:如何利用[百度地图API]进行定位?非GPS定位 如果你可以上网,如果你有火狐浏览器,那么恭喜你.你能很容易使用以下代码进行定位! ------------------------------- ...
- 位置指纹(LF)定位技术简介-室内定位
信号的多径传播对环境具有依赖性,呈现出非常强的特殊性.对于每个位置而言,该位置上信道的多径结构是惟一的,终端发射的无线电渡经过反射和折射,产生与周围环境密切相关的特定模式的多径信号,这样的多径 ...
- ArcGIS Runtime SDK for Android 定位权限(GPS定位\网络定位)
ACCESS_COARSE_LOCATION和ACCESS_FINE_LOCATION: android.permission.ACCESS_COARSE_LOCATION:是基站定位,即基于无线网络 ...
- 3G中的A-GPS移动定位技术
位置业务(LBS,Location Based Service)是指移动网络通过特定的定位技术来获取移动终端的位置信息,从而为终端用户提供附加服务的一种增值业务,可广泛应用于紧急救援.导航追踪.运输调 ...
- LBS 与 GPS 定位之间的区别
什么是LBS定位? LBS英文全称为Location Based Services, 它包括两层含义:首先是确定移动设备或用户所在的地理位置:其次是提供与位置相关的各类信息服务.意指与定位相关的各 ...
- 【Android】GPS定位基本原理浅析
位置服务已经成为越来越热的一门技术,也将成为以后所有移动设备(智能手机.掌上电脑等)的标配.而定位导航技术中,目前精度最高.应用最广泛的,自然非GPS莫属了.网络上介绍GPS原理的专业资料很多,而本文 ...
- 物联网IOT定位技术详解
早在15世纪,当人类开始探索海洋的时候,定位技术也随之催生.当时的定位方法十分粗糙,就是是运用航海图和星象图以确定自己的位置. 随着社会的进步和科技的发展,定位技术在技术手段.定位精度.可用性等方面均 ...
- 【读书笔记】iOS-微定位技术
在大型商场,医院或是大楼里,你是否曾经有过找不到想去的地方的经历呢?这种情况下采用传统的定位方法就有些力不从心了.首先这些地方不能采用GPS定们,而Wifi和蜂窝式移动电话基站定位误差比较大.这种情况 ...
- 浅谈UWB(超宽带)室内定位技术(转载)
技术背景 随着无线通信技术的发展和数据处理能力的提高,基于位置的服务成为最有前途的互联网业务之一.无论移动在室内还是室外环境下,快速准确地获得移动终端的位置信息和提供位置服务的需求变得日益迫切.通信和 ...
- Unity之GPS定位(高德解析)
Unity之GPS定位 Unity之GPS定位(高德解析) 前言 开篇 Unity版本及使用插件 正题 创建场景 写脚本 把脚本挂载到场景中 打包发布场景 安装真机并且测试 代码中的==Key==怎么 ...
随机推荐
- offline RL | BCQ:学习 offline dataset 的 π(a|s),直接使用 (s, π(s)) 作为 Q learning 训练数据
题目: Off-Policy Deep Reinforcement Learning without Exploration,ICLR 2019 pdf 版本:https://arxiv.org/pd ...
- JAVAweek6
本周学习 Java语言基础:运算符[有所区别] 算术运算符 +(3+2) - * / %(取余,模运算) +(连接符)(3+''2'') ++ -- class VarDemo { //算术运算符 p ...
- DevOps|研发提效-敏捷开发之每日站立会
对于研发效能团队建设和组织,本文不再赘述,可以参考之前的文章,已经讲得很透彻了.本文重点讲我们日常是怎么开站立会,怎么让团队跑起来,高效能产出的.每日站立会,15分钟到30分钟,看似非常短的一个会,但 ...
- Tomcat 配合虚拟线程,一种新的编程体验
Java 21 在今年早些时候的 9 月 19 日就正式发布,并开始正式引入虚拟线程,但是作为 Java 开发生态中老大哥 Spring 并没有立即跟进,而是在等待了两个月后的 11 月 29 日,伴 ...
- StackGres 数据库平台工程,使用 Citus + Patroni 创建生产级高可用分布式 PostgreSQL 分片集群
系列 StackGres, 可私有部署的云原生数据库平台工程 StackGres 数据库平台工程功能介绍与快速上手 StackGres 1.6 数据库平台工程集群配置管理(K8S Pods/Postg ...
- stm32存储器:Flash
先擦除后写入,stm32内置flash擦或写时,必须打开外部/内部高速振荡器. 擦除操作 以页为单位,每页1024个字节 起始地址0x0800 0000 擦写时要避开用户程序存储区 最多擦写10万次 ...
- Reactor实战,创建一个简单的单线程Reactor(理解了就相当于理解了多线程的Reactor)
单线程Reactor package org.example.utils.echo.single; import java.io.IOException; import java.net.InetSo ...
- 华企盾DSC无缝替换亿赛通案例
第一种方法无缝替换亿赛通案例 1. 把DSCClient.exe和DSCService.exe添加到亿赛通的加密控制策略中,关联类型设置为*.*|,配置为落地自动解密,包括其它程序也配置成落地自动解密 ...
- java,类、实例化、构造方法、this关键字、方法重载
编写类的步骤: 1.定义类名 2.编写类的属性 3.编写类的方法 public 访问修饰符,表示在整个项目中都可以调用,也可以用其他词 使用class关键字来定义类,如下,定义一个Cat类 给了属性 ...
- java:JDBC使用步骤(mysql)java小白的第一篇博客
1:环境要求 先在你的mysql里面创造一个数据库(并添加一点数据) 下载并导入驱动 2:jdbc的五大步骤 第一步:加载mysql驱动: 1 Class.forName("com.mysq ...