Pytorch入门之VAE
关于自编码器的原理见另一篇博客 : 编码器AE & VAE
这里谈谈对于变分自编码器(Variational auto-encoder)即VAE的实现。
1. 稀疏编码
首先介绍一下“稀疏编码”这一概念。
早期学者在黑白风景照片中可以提取到许多16*16像素的图像碎片。而这些图像碎片几乎都可由64种正交的边组合得到。而且组合出一张碎片所需的边的数目很少,即稀疏的。同时在音频中大多数声音也可由几种基本结构组合得到。这其实就是特征的稀疏表达。即使用少量的基本特征来组合更加高层抽象的特征。在神经网络中即体现出前一层是未加工的像素,而后一层就是对这些像素的非线性组合。
有监督情况下可以利用深层卷积网络来提取特征,而自编码器就是无监督情况下根据自身的高阶特征编码自己。自编码器是输入输出相同的神经网络。其特点是利用稀疏的高阶特征来重构自己。一般而言自编码器的中间隐层节点的数量要小于输入节点的数量,即实现降维过程。因为对于少于输入节点的隐藏层来说无法将输入的全部信息保留,只能优先选择部分重要的特征,而后利用这些特征来复原。此外我们可以给隐层的权重加上L2正则,正则项惩罚因子越大,接近于0的系数越多,从而特征更加稀疏!
关于自编码器我们可以加入一些限制使其实现不同的功能,例如去噪自编码(Denoising AutoEncoder)。输入是加了噪声的数据,而输出是原始数据,在学习过程中,只有学到更鲁棒、更频繁的特征模式才能将噪声略去,回复原始数据。如果自编码器的隐层只有一层,那么原理类似于主成分分析PCA。
HInton提出的DBN模型有多个隐含层,每个隐含层都是限制玻尔兹曼机RBM。DBN训练时需先对每两层间进行无监督的预训练,这一过程实为一个多层的自编码器,可以将每整个网络的权重初始化到一个理想的分布。最后通过反向传播算法调整模型权重,这个步骤会使用经过标注的信息来做监督性的分类训练。当年DBN给训练深度神经网络提供了可能性,它解决了网络过深带来的深度弥散。简言之:先用自编码器的方法进行无监督的预训练,提取特征并初始化权重,然后使用标注信息进行监督式的训练。
2. VAE工作流程
先看下图:

AE的工作其实是实现了 图片->向量->图片 这一过程。就是说给定一张图片编码后得到一个向量,然后将这一向量进行解码后就得到了原始的图片。这个解码后的图片和之前的原图一样吗?不完全一样。因为一般而言,如前所述是从低维隐层中恢复原图。但是AE另我们现在能训练任意多的图片,如果我们把这些图片的编码向量存在来,那以后就能通过这些编码向量来重构我们的图像,称之为标准自编码器。可这还不够,如果现在我随机拿出一个很离谱的向量直接另其解码,那解码出来的东西十有八九是无意义的东西。
所以我们希望AE编码出的code符合一种分布(eg:高斯混合模型),那么我们就可以从这个高斯分布任意采样出一个code,给这个code解码那么就会生成一张原图类似的图。而这个强迫分布就是VAE与AE的不同之处了。VAE的编码器输出包括两部分:m和σ。其中e是正态分布, c为编码结果。m、e、σ、c的形状一样,都为(batch_size,latent_code_num) 。这个latent_code_num就相当于高斯混合分布的高斯数量。每个高斯都有自己的均值、方差。所以共有latent_code_num个均值、方差。
接下来是VAE的损失函数:由两部分的和组成(bce_loss、kld_loss)。bce_loss即为binary_cross_entropy(二分类交叉熵)损失,即用于衡量原图与生成图片的像素误差。kld_loss即为KL-divergence(KL散度),用来衡量潜在变量的分布和单位高斯分布的差异。
3. Pytorch实现
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
"""
Created on Sat Mar 10 20:48:03 2018 @author: lps
""" import torch
import torch.nn as nn
import torch.optim as optim
import torch.nn.functional as F
from torch.autograd import Variable
from torchvision import transforms
import torchvision.datasets as dst
from torchvision.utils import save_image EPOCH = 15
BATCH_SIZE = 64
n = 2 # num_workers
LATENT_CODE_NUM = 32
log_interval = 10 transform=transforms.Compose([transforms.ToTensor()])
data_train = dst.MNIST('MNIST_data/', train=True, transform=transform, download=False)
data_test = dst.MNIST('MNIST_data/', train=False, transform=transform)
train_loader = torch.utils.data.DataLoader(dataset=data_train, num_workers=n,batch_size=BATCH_SIZE, shuffle=True)
test_loader = torch.utils.data.DataLoader(dataset=data_test, num_workers=n,batch_size=BATCH_SIZE, shuffle=True) class VAE(nn.Module):
def __init__(self):
super(VAE, self).__init__() self.encoder = nn.Sequential(
nn.Conv2d(1, 64, kernel_size=4, stride=2, padding=1),
nn.BatchNorm2d(64),
nn.LeakyReLU(0.2, inplace=True), nn.Conv2d(64, 128, kernel_size=4, stride=2, padding=1),
nn.BatchNorm2d(128),
nn.LeakyReLU(0.2, inplace=True), nn.Conv2d(128, 128, kernel_size=3 ,stride=1, padding=1),
nn.BatchNorm2d(128),
nn.LeakyReLU(0.2, inplace=True),
) self.fc11 = nn.Linear(128 * 7 * 7, LATENT_CODE_NUM)
self.fc12 = nn.Linear(128 * 7 * 7, LATENT_CODE_NUM)
self.fc2 = nn.Linear(LATENT_CODE_NUM, 128 * 7 * 7) self.decoder = nn.Sequential(
nn.ConvTranspose2d(128, 64, kernel_size=4, stride=2, padding=1),
nn.ReLU(inplace=True), nn.ConvTranspose2d(64, 1, kernel_size=4, stride=2, padding=1),
nn.Sigmoid()
) def reparameterize(self, mu, logvar):
eps = Variable(torch.randn(mu.size(0), mu.size(1))).cuda()
z = mu + eps * torch.exp(logvar/2) return z def forward(self, x):
out1, out2 = self.encoder(x), self.encoder(x) # batch_s, 8, 7, 7
mu = self.fc11(out1.view(out1.size(0),-1)) # batch_s, latent
logvar = self.fc12(out2.view(out2.size(0),-1)) # batch_s, latent
z = self.reparameterize(mu, logvar) # batch_s, latent
out3 = self.fc2(z).view(z.size(0), 128, 7, 7) # batch_s, 8, 7, 7 return self.decoder(out3), mu, logvar def loss_func(recon_x, x, mu, logvar):
BCE = F.binary_cross_entropy(recon_x, x, size_average=False)
KLD = -0.5 * torch.sum(1 + logvar - mu.pow(2) - logvar.exp()) return BCE+KLD vae = VAE().cuda()
optimizer = optim.Adam(vae.parameters(), lr=0.001, betas=(0.9, 0.999), eps=1e-08, weight_decay=0) def train(EPOCH):
vae.train()
total_loss = 0
for i, (data, _) in enumerate(train_loader, 0):
data = Variable(data).cuda()
optimizer.zero_grad()
recon_x, mu, logvar = vae.forward(data)
loss = loss_func(recon_x, data, mu, logvar)
loss.backward()
total_loss += loss.data[0]
optimizer.step() if i % log_interval == 0:
sample = Variable(torch.randn(64, LATENT_CODE_NUM)).cuda()
sample = vae.decoder(vae.fc2(sample).view(64, 128, 7, 7)).cpu()
save_image(sample.data.view(64, 1, 28, 28),
'result/sample_' + str(epoch) + '.png')
print('Train Epoch:{} -- [{}/{} ({:.0f}%)] -- Loss:{:.6f}'.format(
epoch, i*len(data), len(train_loader.dataset),
100.*i/len(train_loader), loss.data[0]/len(data))) print('====> Epoch: {} Average loss: {:.4f}'.format(
epoch, total_loss / len(train_loader.dataset))) for epoch in range(1, EPOCH):
train(epoch)
main.py
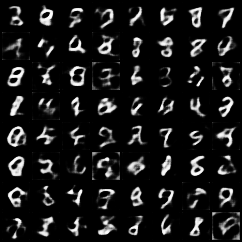
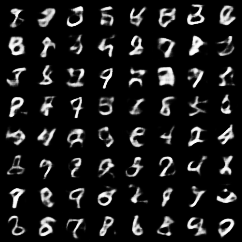
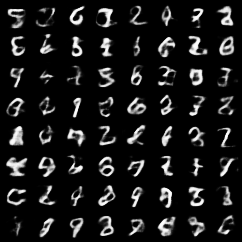
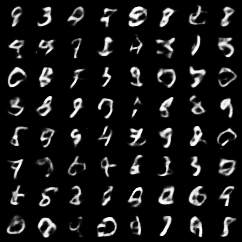
编解码器可由全连接或卷积网络实现。这里采用CNN。结果如下:


参考 :
《Tensoflow 实战》
Paper-Implementations
yunjey/pytorch-tutorial
Pytorch入门之VAE的更多相关文章
- [pytorch] Pytorch入门
Pytorch入门 简单容易上手,感觉比keras好理解多了,和mxnet很像(似乎mxnet有点借鉴pytorch),记一记. 直接从例子开始学,基础知识咱已经看了很多论文了... import t ...
- Pytorch入门随手记
Pytorch入门随手记 什么是Pytorch? Pytorch是Torch到Python上的移植(Torch原本是用Lua语言编写的) 是一个动态的过程,数据和图是一起建立的. tensor.dot ...
- pytorch 入门指南
两类深度学习框架的优缺点 动态图(PyTorch) 计算图的进行与代码的运行时同时进行的. 静态图(Tensorflow <2.0) 自建命名体系 自建时序控制 难以介入 使用深度学习框架的优点 ...
- 超简单!pytorch入门教程(五):训练和测试CNN
我们按照超简单!pytorch入门教程(四):准备图片数据集准备好了图片数据以后,就来训练一下识别这10类图片的cnn神经网络吧. 按照超简单!pytorch入门教程(三):构造一个小型CNN构建好一 ...
- pytorch入门2.2构建回归模型初体验(开始训练)
pytorch入门2.x构建回归模型系列: pytorch入门2.0构建回归模型初体验(数据生成) pytorch入门2.1构建回归模型初体验(模型构建) pytorch入门2.2构建回归模型初体验( ...
- pytorch入门2.0构建回归模型初体验(数据生成)
pytorch入门2.x构建回归模型系列: pytorch入门2.0构建回归模型初体验(数据生成) pytorch入门2.1构建回归模型初体验(模型构建) pytorch入门2.2构建回归模型初体验( ...
- pytorch入门2.1构建回归模型初体验(模型构建)
pytorch入门2.x构建回归模型系列: pytorch入门2.0构建回归模型初体验(数据生成) pytorch入门2.1构建回归模型初体验(模型构建) pytorch入门2.2构建回归模型初体验( ...
- Pytorch入门——手把手教你MNIST手写数字识别
MNIST手写数字识别教程 要开始带组内的小朋友了,特意出一个Pytorch教程来指导一下 [!] 这里是实战教程,默认读者已经学会了部分深度学习原理,若有不懂的地方可以先停下来查查资料 目录 MNI ...
- Pytorch入门上 —— Dataset、Tensorboard、Transforms、Dataloader
本节内容参照小土堆的pytorch入门视频教程.学习时建议多读源码,通过源码中的注释可以快速弄清楚类或函数的作用以及输入输出类型. Dataset 借用Dataset可以快速访问深度学习需要的数据,例 ...
随机推荐
- 开源工作流程引擎ccflow多人待办处理模式的详解
多人待办工作处理模式,也是待办处理模式.是当接受的节点是多个人的时候,如何处理待办? 根据不用的场景,ccbpm把多人在普通节点下的处理模式分为如下几种. 抢办模式: A发送到B ,B节点上有n个人可 ...
- 在Java Web程序中使用监听器可以通过以下两种方法
之前学习了很多涉及servlet的内容,本小结我们说一下监听器,说起监听器,编过桌面程序和手机App的都不陌生,常见的套路都是拖一个控件,然后给它绑定一个监听器,即可以对该对象的事件进行监听以便发生响 ...
- 自学Python2.9-循环(while、for)
自学Python之路 自学Python2.9-循环(while.for) 1. while循环 Python中while语句的一般形式: while 判断条件: 语句 作用:提高开发效率,提高代码重用 ...
- luogu3195/bzoj1010 玩具装箱(斜率优化dp)
推出来式子然后斜率优化水过去就完事了 #include<cstdio> #include<cstring> #include<algorithm> #include ...
- Spark 集成开发
WordCount.py # coding:utf-8 from pyspark import SparkContext from pyspark import SparkConf def SetLo ...
- hdu 2870 Largest Submatrix(平面直方图的最大面积 变形)
Problem Description Now here is a matrix with letter 'a','b','c','w','x','y','z' and you can change ...
- android 下改变默认的checkbox的 选中 和被选中 图片
1. 先导入 checked.png 和 unchecked.png 两张图片 2. 在res/drawable下面,添加selector (如 check_state.xml)文件: < ...
- 【POJ3974】最长回文字串
在这里采用的是哈希+二分的方法. 根据回文串的性质可知,可以将回文分成奇回文和偶回文分别进行处理. 对于奇回文来说,每次枚举的端点一定是重合的,因此只需计算出端点左右公共的长度是多少即可,因此二分的是 ...
- java:给图片上加水印
import java.awt.Color; import java.awt.Graphics2D; import java.awt.Image; import java.awt.image.Buff ...
- 【已解决】ERR_BLOCKED_BY_XSS_AUDITOR:Chrome 在此网页上检测到了异常代码:解决办法
工作中,用Selenium自动化填表并获取结果时,程序一直安静的读取数据库,网页填表,获取结果,存库,但跑着跑着突然报错了. 排查后,原来不是Selenium的问题,是数据比较特殊,带了个双引号,如下 ...