论文笔记:(CVPR2019)Relation-Shape Convolutional Neural Network for Point Cloud Analysis
Relation-Shape Convolutional Neural Network for Point Cloud Analysis
Yongcheng Liu Hao Bin Fan Kaichun Shiming Xiang Leonidas Chunhong Pan
论文地址:https://arxiv.org/abs/1904.07601
代码:https://github.com/Yochengliu/Relation-Shape-CNN
项目主页:https://yochengliu.github.io/Relation-Shape-CNN/
作者直播:https://www.bilibili.com/video/av61824733
作者维护了一个收集一系列点云论文、代码、数据集的github仓库:https://github.com/Yochengliu/awesome-point-cloud-analysis
这篇paper是CVPR 2019 Oral & Best paper finalist
摘要
点云分析非常具有挑战性,因为很难捕获隐含在不规则点中的形状。
在本文中,提出了RS-CNN,即关系形状卷积神经网络,它将规则网格CNN扩展到不规则配置,以进行点云分析。
RS-CNN的关键是从关系中学习,即点之间的几何拓扑约束。
具体地,局部点集的卷积权重从该点集的采样点与其他点之间的预定义几何先验中学习高级关系表达式。以此方式,可以获得具有明确的关于点的空间布局的推理的归纳局部表示,这导致了很多形状感知和鲁棒性。使用这种卷积作为RS-CNN的基本运算符,可以开发出层次结构来实现上下文形状感知学习,以进行点云分析。
通过在三个任务上进行具有挑战性的基准测试的广泛实验,证明RS-CNN达到了最新水平。
一、引言
近年来,三维点云分析由于在自动驾驶和机器人操作等方面的应用越来越受到人们的关注。但是,这个任务非常具有挑战性,因为很难推断出这些不规则点所形成的基本形状(详见图1)。
对于这个问题,很多工作集中在复制卷积神经网络(CNN)对规则网格数据(如图像) 分析的显著成功 [17,32]到不规则点云处理[26,15,45,29,27,34,38]上。一些工作将点云转换为常规体素[42,22,3]或多视图图像[35,2,5]便于应用经典网格CNN。然而,这些变换通常会导致对三维点的固有几何信息造成了很大的损失云,以及高度的计算复杂性。
为了直接处理点云,PointNet[24]对每个点进行独立学习,并收集全局表示的最终特征。虽然令人印象深刻,但这个设计忽略了局部结构,而这些局部结构已被证明是图像CNN[49]提取高级视觉概念的重要因素。为了解决这个问题,一些工作通过采样[26]或超点[18]将点云划分为多个子集。然后建立层次结构来学习从局部到全局的上下文表示。然而,这非常依赖于对局部子集的有效的归纳学习,这是很难实现的。
通常,从点集 进行学习主要面临三个挑战:
(1) P是无序的,因此要求学习的表示是置换不变的;
(2) P分布在3D几何空间中,因此要求学习的表示形式对刚性变换(例如旋转和平移)具有鲁棒性;
(3) P构成一个基本形状,因此,学习到的表示应具有判别性形状意识。
问题(1)已通过对称函数得到了很好的解决,而(2)和(3)仍然要求全面探索。这项工作的目标是将常规网格CNN扩展到不规则配置,以便一起处理这些问题。
为此,我们提出了一种关系形状卷积神经网络(别名为RS-CNN)。 RS-CNN的关键是从关系中学习,即点之间的几何拓扑约束,我们认为这可以在3D点云中编码有意义的形状信息。
特别地,每个局部卷积邻域都是通过将采样点x作为质心来构造,周围的点作为其邻居N(x)。
卷积权重从预定义的几何先验中学习高级关系表达式,即x和N(x)之间的直观低级关系。通过以这种方式进行卷积,可以获得具有关于点的空间布局的明确推理的归纳表示。它可辨别地反映不规则点形成的潜在形状,因此可以识别形状。此外,它可以受益于几何先验,包括对点置换的不变性和对刚性变换(例如,平移和旋转)的鲁棒性。
通过将卷积作为基本运算符,可以开发类似于CNN的分层体系结构,即RSCNN,以实现上下文形状感知学习以进行点云分析。
主要的贡献如下:
提出了一种新的从关系中学习卷积算子,称为关系形卷积。它可以显式地编码点的几何关系,从而获得更多的形状意识和鲁棒性;=》RS-Conv
提出了一种具有关系形状卷积的深层次结构,即RS-CNN。它可以将规则的网格CNN扩展到不规则的配置,以实现点云的上下文形状感知学习;=>RS-CNN
跨三个任务在具有挑战性的基准上进行了广泛的实验,以及详尽的经验和理论分析,证明RS-CNN达到了最先进的水平。
二、相关工作
基于视图和体素的方法
基于视图的方法将3D形状表示为来自不同角度的一组2D视图。最近,许多研究[35,2,5,43,6,25]被提出用深度神经网络识别这些视图图像。他们经常微调一个预先训练过的基于图像的架构来精确识别。然而,二维投影可能会由于自遮挡而导致形状信息丢失,而且它通常需要大量的视图来获得良好的性能。
体素方法将输入的3D形状转换为常规3D网格,可以在其上使用经典的CNN [42, 22, 3]。主要限制是由于3D网格强制执行的低分辨率而导致形状的量化损失。最近的空间划分方法,例如K-d树[16]或八叉树[39, 36, 28]挽救了一些分辨率问题,但仍然依赖于边界体积的细分而不是局部几何形状。
点云上的深度学习
PointNet [24]通过在每个点上独立学习并通过最大池收集最终特征来开创了这条路线。然而,这种设计忽略了局部结构,事实证明,局部结构对于CNN的成功至关重要。为了解决这个问题,PointNet ++ [26]建议将PointNet分层应用到点云。在[4,30]中也研究了基于PointNet的局部结构开发。此外,提出了用超点[18]将点云划分为几何单元。图卷积网络应用于由邻近点创建的局部图[38,37,20]。然而,这些方法没有显式地建模点的局部空间布局,从而获得较少的形状感知。相比之下,我们的工作通过学习点之间的高级关系表达来捕捉点的空间布局。
一些论文将点云映射到高维空间,以促进经典CNN的应用。SPLA TNet [34]将输入点映射到稀疏网格上,然后使用双边卷积[14]进行处理。PCNN[1]将点云上的函数扩展为环境空间上的连续体积函数。这些方法可能会导致几何信息丢失,而我们的方法直接在点云上运行而不会引起这种丢失。
另一个关键问题是点云的不规则性。一些论文着重于分析与点集学习[24, 27, 48, 19].等价的对称函数。一些论文[24, 21]开发了对齐网络,以增强3D空间中刚性转换的鲁棒性。但是,对齐学习是此问题的次佳解决方案。一些传统的描述符(例如快速点特征直方图)对于平移和旋转可能是不变的,但是对于高层形状理解而言,它们通常效率较低。我们的方法学习了点之间的几何关系,对刚性变换是自然鲁棒的,同时由于深度网的强大而非常有效。
相关性学习
在图像和视频分析领域,从关系中学习依赖数据的权值已被探讨。Spatial transformer [13]学习一个过渡矩阵来对齐二维图像。Non-local network [40]学习跨视频帧的长期关系。Relation networks [9]学习对象之间的位置关系。
也有一些关于三维点云中的关系学习的研究。DGCNN[41]通过学习高维特征空间中的点关系来捕获相似的局部形状,但这种关系在某些情况下可能不可靠。Wang等人提出了一种基于点间可计算关系的参数连续卷积,但他们没有像经典CNN那样明确地从局部到全局学习。与此相反,我们的方法从三维空间的几何先验中学习高级的关系表达,并执行上下文的局部到全局的形状学习。
三、形状意识表示学习
点云分析的核心是在鲁棒性的前提下区分地表示隐含的形状。在这里,我们通过一种新的关系-形状卷积(RS-Conv)将规则网格CNN扩展到不规则配置,从而学习上下文形状感知表示。
3.1关系-形状卷积
Local-to-global学习在图像CNN中取得了显著的成功[17,32],是一种很有前途的上下文形状表示方法。然而,它极度依赖于不规则点子集的形状感知的归纳学习,这仍然是一个相当棘手的问题。
建模
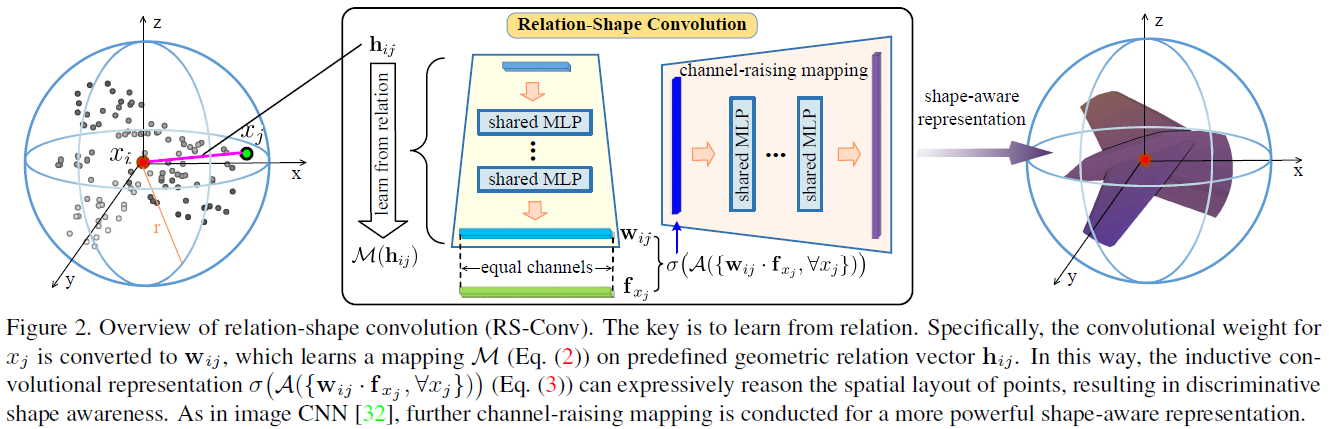
为了克服这个问题,这篇论文将局部点子集Psub建模为球面邻域,其中采样点xi为质心,周围的点为邻居x j∈N(xi)。图2的最左侧部分说明了此建模。目标是学习该邻域的归纳表示fPsub,其应有区别地编码基础形状信息。为此,将一般的卷积运算表述为:

其中,x是3D点,f是特征向量。dij是xi和xj 之间的欧几里得距离,r是球体半径。fPsub是通过首先使用函数τ转换N(xi)中所有点的特征,然后将它们与函数A以及非线性激活因子σ相加而获得的。在此公式中,两个函数A和τ是fPsub的关键,也就是这篇paper的创新所在。即,仅当A是对称的(例如,求和,2D卷积里是求和,点云里用的max)并且在N(xi)中的每个点上共享τ时,才能实现点集的置换不变性。
经典CNN的局限性
在经典的CNN中,τ被实现为τ ( fxj ) = w j • f xj,其中wj是可学习的权重,“•”表示逐元素相乘。
当将卷积应用于点云时,主要有两个局限性:
1)不具备置换不变性:wj在N ( x i )中的每个点上不共享,导致点置换的方差和不能处理不规则Psub的能力(例如,不同的数量);
2)没有学到形状信心:wj反向传播的梯度仅与孤立点xj有关,从而导致隐式学习策略,这不会带来太多的fPsub的形状意识和鲁棒性。
变换:从关系中学习
我们认为,上述限制可以通过从关系中学习来缓解。在三维空间的邻域中,xi与其所有邻域N(xi)之间的几何关系是关于点的空间布局的显式表达,进一步区分地反映了基本形状。为了捕捉这种关系,我们将经典CNN中的wj替换为wij, wij为学习一个关系向量hij的映射M,即预定义的xi和xj之间的几何先验。我们称hij为低级关系。这个过程可以描述为

映射M的目的是抽象两点之间的高级关系表达式,可以对它们的空间布局进行编码。在这里,使用共享的多层感知器(MLP)来实现M,由于其具有强大的映射功能。此过程在图2的中间部分进行了说明。以此方式,w j 整齐地转换为wij,其梯度(由hij确定)与xi 和xj相关。同时,M在N ( xi )中的所有点上完全共享,从而使其不受点的不规则性影响。对于刚性转换,它也可以是健壮的,这将在第3.2节中阐明。
因此,Eq.(1)中的fPsub变成

这种卷积表示将所有xi和N(xi)之间的关系聚合在一起,可以实现对点的空间布局的显式推理,从而产生辨别形状的感知。对于几何先验,可以使用三维欧几里得距离作为低级关系hij的直观描述(也可以使用特征维度上的距离)。此外,hij也可以被灵活定义,因为它可以映射到一个高维的关系向量,用于与fxj通道对齐,便于乘法。
我们将在实验部分详细讨论hij。
通道提升映射
在等式(3)中,fPsub的通道号与输入特征f x j 相同。这与经典图像CNN不一致,经典CNN在增加通道数量的同时降低图像分辨率以实现更抽象的表示。例如,在VGG网络[34]中设置了通道号64-128-256-512。因此,我们在fPsub上添加了一个共享的MLP,用于进一步的信道提升映射。它显示在图2的中间部分。
补充:
RS-Conv的流程如下:
(1)首先通过FPS进行采样,得到质心Xi;
(2)在球形邻域寻找近邻Xj;
(3)对每个近邻Xj,计算Xj和Xi的low-level信息,即几何先验hij,hij的表示方法有许多,作者论文中定义hij=[3D-Ed,Xi-Xj,Xi,Xj],即两点的欧普是距离(1维)、相对坐标(3维)、Xi的坐标(3维)和Xj的坐标(3维)进行拼接,得到一个10维的low-level信息;
(4)使用MLP将hij映射到high level高维信息,即wij=M(hij),注意,wij的维度要和fxj的特征维度相同,才可以进行点乘;
(5)将得到的wij和fxj点乘;
(6)max操作,聚合所有近邻的信息作为质心Xi的新特征,接着为了实现更强大的形状感知表示,将Xi进行进一步的通道提升映射(这个模仿了CNN中卷积之后通道数不断增加),即channel-raising mapping
最远点采样FPS的步骤:
假设一共有n个点,整个点集为N = {f1, f2,…,fn}, 目标是选取n1个起始点做为下一步的中心点:
- 随机选取一个点fi为起始点,并写入起始点集 B = {fi};
- 选取剩余n-1个点计算和fi点的距离,选择最远点fj写入起始点集B={fi,fj};
- 选取剩余n-2个点计算和点集B中每个点的距离,将最短的那个距离作为该点到点集B的距离, 这样得到n-2个到点集的距离,选取最远的那个点写入起始点B = {fi, fj,fk},同时剩下n-3个点, 重复上面步骤直到选取n1个起始点为止.
以上就是RS-Conv的操作过程。有点复杂,类比成2D图像的卷积的话,一个明显的区别是RS-Conv的卷积核Wij是通过hij(即低维关系信息)学习来的,这也是本文的最大创新点,但实际上,这个操作在其他论文中也有出现,比如GACnet,DGCNN只是他们定义hij的方式不同。
3.2性质
Xi
RS-Conv中等式3可以保持四个相当好的属性:
置换不变性
在内部映射函数中M(h),即低级关系h和共享的MLP M对于点的输入顺序是不变的。因此,在外部聚集函数A对称的情况下,可以满足置换不变性。
对刚性变换鲁棒
这个属性在高级关系编码M(h)中很好地保持了。当一个合适的h(例如3D欧几里得距离)被定义时,它可以对刚性变换(例如平移和旋转)具有鲁棒性。
点相互作用
点不是孤立的,附近的点在几何空间中形成有意义的形状。因此,他们内在的相互作用对甄别形状意识是至关重要的。我们的关系学习解决方案显式地编码点之间的几何关系,自然地捕获了点之间的相互作用。
权重共享
这是关键特性,可将相同的学习功能应用于不同的不规则点子集,以实现鲁棒性和低复杂度。在式(3)中,对称的A、共享的MLP M和预定义的几何先验h都与点的不规则性无关。因此,这个属性也被满足。
3.3再讨论2D网格卷积
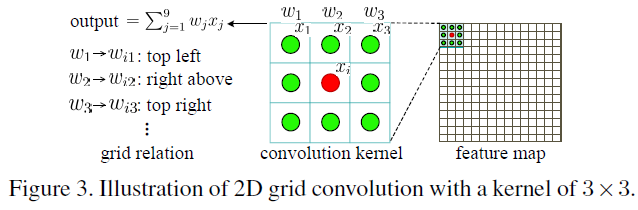
提出的RS-Conv是用于关系推理的2D网格卷积的通用表述。我们在2d网格特征图上用3×3的邻域(卷积核)来阐明这一点,如图3所示。具体来说,求和函数是聚合函数A的一个特定实例。此外,请注意,在规则网格中,wj总是暗示xi与其邻居xj之间存在固定的位置关系。例如,w1总是表示与xi的左上关系,而w2则表示与xi的右上关系。换句话说,wj在学习过程中实际上是被限制为编码一种规则的网格关系。因此,我们的带关系学习的RS-Conv更为通用,可以应用于建模2D网格空间关系。
3.4用于点云分析的RS-CNN
利用RS-Conv(图2)作为基本算子,并采用统一采样策略,实现了像经典CNN一样的分层形状感知学习架构,即RS-CNN,用于点云分析,例如

RS-CNN在点云的分类和分割中的应用如图4所示。
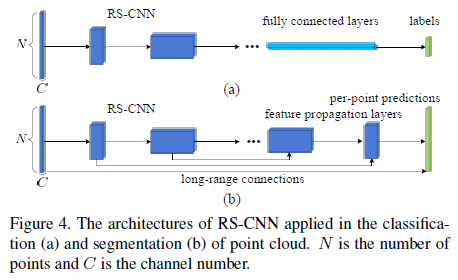
在这两个任务中,RS-CNN用于学习一组层次的Shapeaware表示。配置最终的全局表示形式,后跟三个完全连接的(FC)层,以进行分类。
对于分割,通过特征传播[26]对学习的多级表示进行连续上采样以生成每点预测。两者都可以端到端的方式进行训练。
3.5应用细节
在Eq.(3)中的RS-Conv 使用对称函数max pooling作为聚集函数A。ReLU[23]作为非线性激活器。对于映射函数M,部署了一个三层共享的MLP,因为理论上它可以适应任意的连续映射[8]。低层关系hij被定义为一个有10个通道的紧凑向量,即(3D欧氏距离,xi−xj, xi, xj)。通道提升映射是通过单层共享的MLP实现的。批量标准化[12]应用于每个MLP。
用于点云分析的RS-CNN从点云中选取最远点,以便对局部子集进行采样去执行RS-Conv。在每个邻域中,随机抽取固定数量的邻域进行批处理。它们以质心为原点被标准化。为了捕捉更充分的几何关系,强制RSCNN在以共享权重的采样点为中心的三尺度邻域中学习。这与多尺度分组(MSG)[26]不同,后者使用多组权重来学习多尺度特征。部署3层RS-CNN和4层RS-CNN分别进行分类和分割。注意,只有3D坐标xyz被用作RS-CNN的输入特性。
我们的RS-CNN是使用Pytorch实现的。采用Adam优化算法进行训练,最小批量为32。BN的动量从0.9开始,然后每20个epochs以0.5的速率衰减。学习速率从0.001开始,然后每20个epochs以0.7的速率衰减。RS-CNN的权值使用He等[7]引入的技术进行初始化。
四、实验
在本节中,我们安排了全面的实验来验证所提出的RS-CNN。首先,我们评估RSCNN在三个任务上的点云分析(4.1节)。然后,我们提供了详细的实验来仔细研究RSCNN(4.2节)。最后,我们可视化RS-CNN捕捉的形状特征并分析了复杂性(第4.3节)。
4.1点云分析
形状分类
我们在Model Net40分类基准[42]上评估RS-CNN。它是由9843个训练模型,2468个测试模型,共40个类。通过[24]对这些模型的点云数据进行采样。我们均匀采样1024个点,并将其归一化为一个单位球体。在训练过程中,我们在[-0.66,1.5]范围内使用随机各向异性缩放并在[-0应用了比率为50%的dropout 技术。在测试过程中,使用随机缩放执行十次投票测试,并对预测取平均。
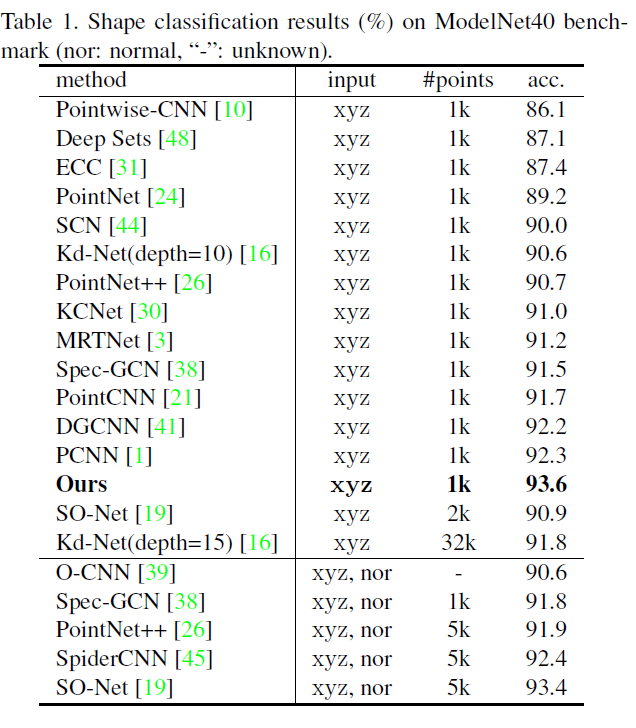
表1总结了与最新点基方法的定量比较,RS-CNN优于所有的xyz输入方法。具体地说,RS-CNN将PointNet++[26]的错误率降低了31.2%,超过了它的使用了额外的正常数据和非常密集的点(5k)的高级版本。此外,即使只使用xyz作为输入,RS-CNN也可以获得比最佳添加输入方法SO-Net[19](93.4%)更好的结果(93.6%)。这有力地证明了我们RS-CNN的有效性。
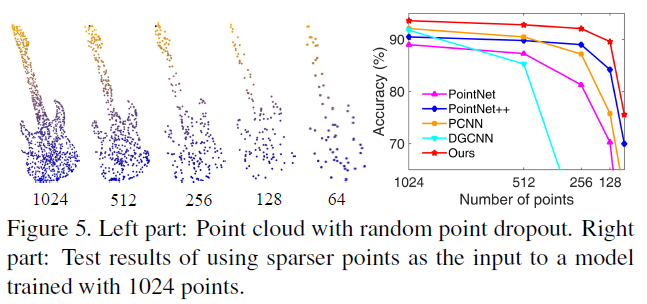
我们以个数为1024、512、256、128和64的稀疏点作为输入,测试RS-CNN对采样密度的鲁棒性。在[26]中,采用随机输入dropout技术进行公平比较。试验结果如图5所示,
比较的方法有:PointNet [24], PointNet++ [26],PCNN[1]和DGCNN[41]。可以看出,点越稀疏,形状识别就越困难。即便如此,RS-CNN仍然相当稳健。它具有与PointNet ++几乎一致的鲁棒性,同时在每种密度下均显示出卓越的性能。
形状部件分割
部件分割是一项具有挑战性的细粒度形状分析任务。我们在ShapeNet part benchmark[46]上执行此任务来评估RS-CNN,并遵循[24]中的数据分割。该数据集包含16881个形状,16个类别,总共被标注为50个部分。按照在[24]中,我们随机选择2048个点作为输入,并将对象标签的单个点编码连接到最后一个特征层。在测试期间,我们还使用随机缩放应用了10个投票测试。除了每个类别的标准IoU (Inter- overunion),我们还报告了两种MIoU,分别是所有类和所有实例的平均值。
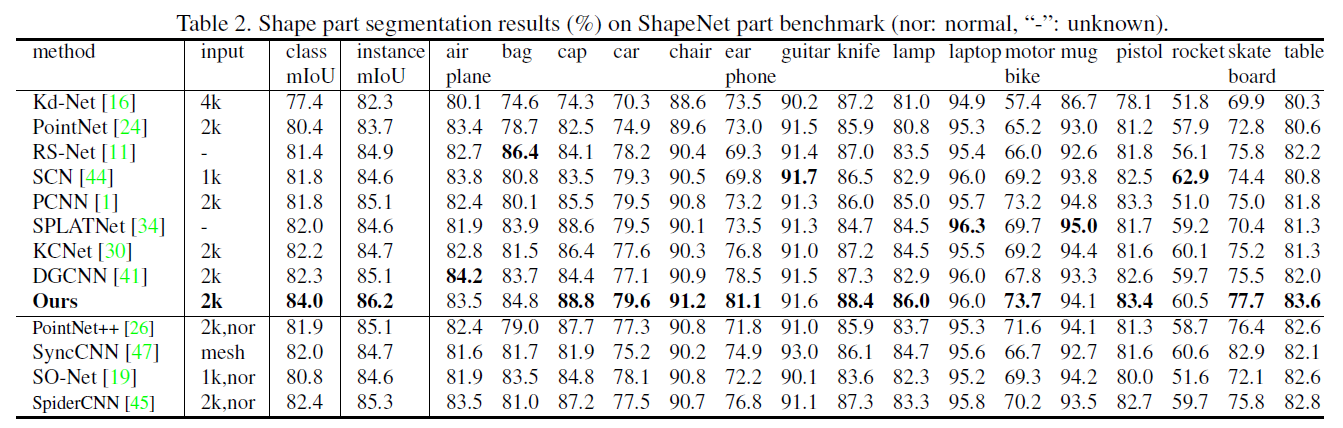
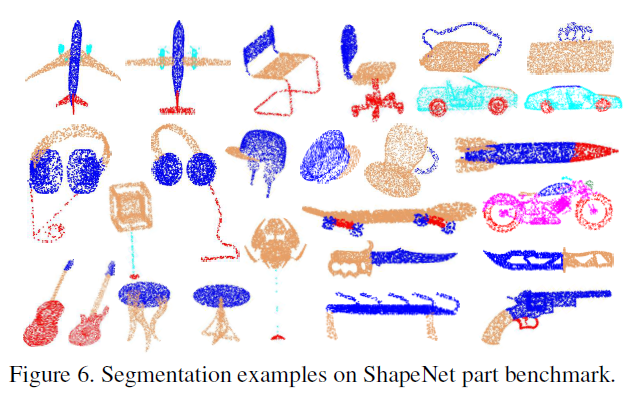
表2总结了与最先进的方法进行的定量比较,其中RS-CNN获得了最佳性能,类mIoU为84.0%,实例mIoU为86.2%。这大大超过了第二好的基于xyz的方法,即DGCNN[41] 在mIoU类的82.3%(1.7)和PCNN[1]中,实例mIoU中的85.1%(1.1)。值得注意的是,RS-CNN在基于xyz的方法中在十个类别实现了新的技术水平,这些改进证明了RS-CNN对各种形状结构的鲁棒性。图6显示了一些分割示例。尽管隐含在不规则点中的部件形状是多种多样的,并且可能很难识别,但是RS-CNN也可以以相当高的精度对它们进行分割。
法向量估计
点云的法向量估计是曲面重建和绘制等众多应用中的关键步骤。这项任务非常具有挑战性,因为它需要更高层次的推理,而这超出了基本的形状识别。我们将法向量作为一个监督回归任务,并利用分割网络来实现。使用归一化输出与ground truth normal之间的余弦损失进行回归训练。评价采用ModelNet40数据集,输入均匀采样1024点。

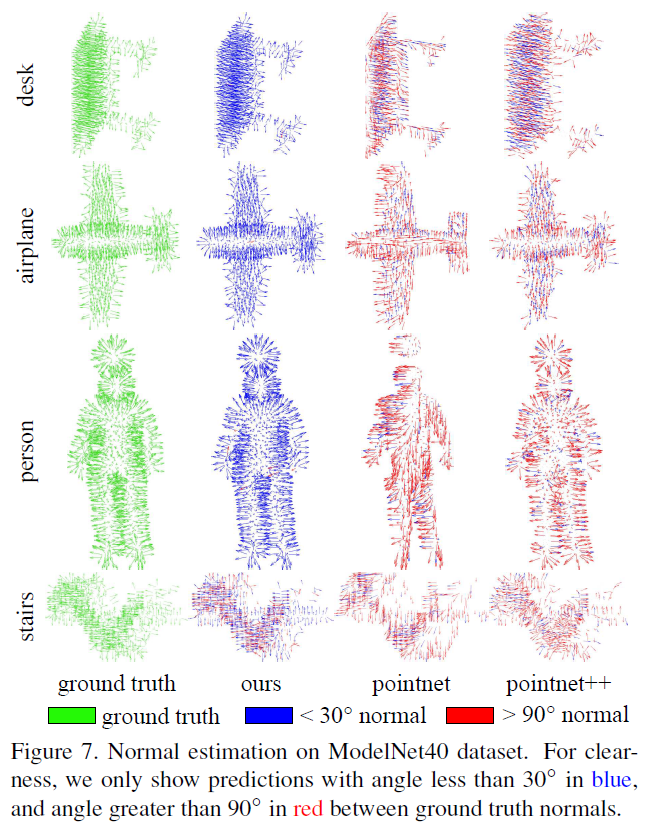
定量结果见表3。在此任务上,RSCNN的性能优于其他高级方法,误差较低,为0.15。这样可以将PointNet ++(0.29)的错误显着减少48.3%。图7显示了一些正常的估计示例,其中带有几何关系学习的RS-CNN可以获取更多好的预测。但是,对于某些棘手的形状,例如螺旋楼梯和复杂的植物,RS-CNN也可能不太有效。
4.2 RS-CNN设计分析
在本节中,我们首先在RS-CNN上进行详细的消融研究。然后讨论了Eq.(3)中聚合函数A、映射函数M和底层关系h的选择,最后验证了RS-CNN对点置换和刚性变换的鲁棒性。所有实验都在ModelNet40分类数据集上进行。
消融研究
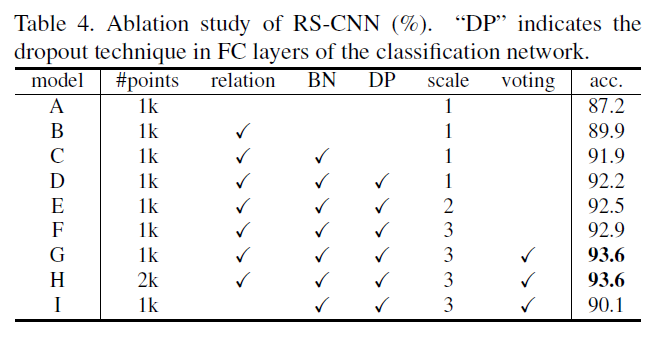
结果如表4所示。基线(模型A)设置为不进行几何关系编码的去学习,,但在Eq.(1)中使用共享的三层MLP作为特征变换函数T。baseline仅获得87.2%的准确度。通过几何关系学习,可以将其显着提高到89.9%(模型B)。证明了RS-CNN的有效性。使用BN(模型C)后可将性能提高2%,这可能是因为它可以大大简化网络训练。DP技术将结果提高了0.3%(模型D)。正如在章节3.5中提到的,RS-CNN应该能够从充分的几何关系中获益。模型E(92.5%)和模型F(92.9%)分别进行了两级和三级关系学习验证了这一点。通过十次投票测试,仅使用xyz功能就可以达到93.6%的惊人准确性(G型)。
为了研究输入点的数量对RS-CNN的影响。
为了研究输入点的数量对RS-CNN的影响,我们也训练了2048个点的网络,但没有发现任何改善(模型H)。该模型(模型I)适用于除关系学习之外的所有技术。准确度达到90.1%,RS-CNN也可以超过3.5%。
我们推测,具有几何关系推理的RS-CNN能够获得更强的形状识别能力,而多尺度关系学习可以极大地增强这种识别能力。
聚合函数A

三个对称函数:最大池(max),平均池(avg)和求和(sum)用于研究A对RS-CNN的影响。表5总结了结果。可以看出,M使用三层时,max pooling的性能最好,average pooling和sum的性能相同的准确了。原因可能是max pooling可以选择最大的feature response,从而保持最有表现力的表示,去除冗余信息。
映射函数M
表5所示的前三行总结了不同层部署M的结果。我们可以看到,通过共享的三层MLP得到了93.6%的最佳精度,当增加层数时但它下降了0.9%。原因可能是四层结构给网络训练带来了一定的困难。值得注意的是,RS-CNN仅使用两层就可以获得92.4%的精度。验证了关联学习在点云基础形状捕获中的有效性。
低级关系h
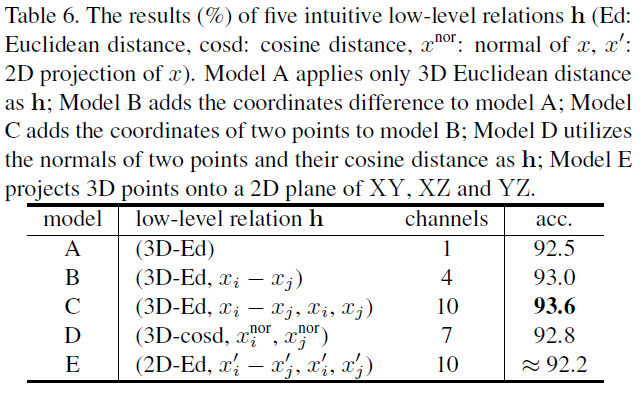
RS-CNN的关键在于从关系中学习,如何定义h是一个值得探索的问题。其实,h的定义是可以灵活的,只要它能区别地反映出潜在的形状。为了验证这一论断并便于理解,我们实验了五个直观的关系定义作为例子,其结果如表6所示。
仅使用3D欧式距离作为h,精度也可以达到92.5%(模型A)。这证明了我们的RS-CNN对于高级几何关系学习的有效性。通过包括坐标差(模型B)和坐标自身(模型C)在内的其他关系,性能逐渐提高。利用两个点的法线向量及其余弦距离作为h,结果(模式D)是92.8%。这表明RS-CNN也能够从法线中的关系中提取形状信息。
直观地,点云的2D视图中的点之间的关系也可以反映基础形状。为了验证RS-CNN在2D关系上的形状抽象,将3D坐标中的一维值强制设置为零,即将3D点投影到XY,XZ和YZ的2D平面上。结果大约是92.2%(E型),这进一步验证了所提出的关系学习方法的有效性。
点置换和刚性变换的鲁棒性

我们将RS-CNN与PointNet[24] 和PointNet ++[26]的鲁棒性进行比较。有模型都经过训练,没有相关的数据扩充,例如平移或旋转,以避免在此测试中造成混淆。尽管RS-CNN中的关系学习对旋转具有鲁棒性,但3D坐标的初始输入特征会受到影响。通过将每个采样点子集归一化为相应的局部坐标系来解决此问题,该局部坐标系由每个采样点及其法线确定。为了公平地比较,对PointNet ++执行此归一化,因为它也可以从局部子集中学习。在此测试中,将3D欧式距离用作RSCNN中的几何关系h。图7总结了这个结果。
可以看出,所有方法对于排列都是不变的。但是,PointNet易受平移和旋转的影响,而PointNet ++对旋转敏感。相比之下,我们的带有几何关系学习的RS-CNN对于这些扰动是不变的,从而使其对于强大的形状识别具有强大的功能。
4.3 可视化和复杂性分析
可视化
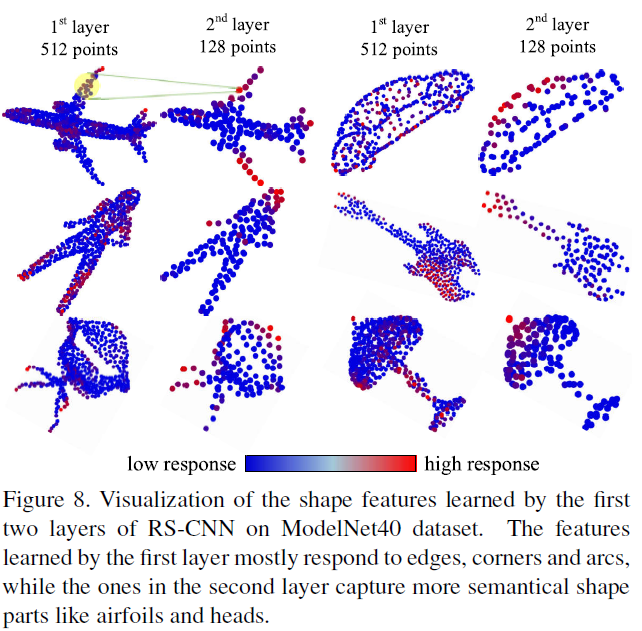
图8显示了在ModelNet40数据集上RS-CNN的前两层学习到的形状特征。
如图所示,第一层学习的特征主要对棱角和弧线做出反应,而第二层的特征捕获了更多语义形状的部分,如机翼和头部。这验证了RS-CNN可以学习渐进性的形状感知表示用于点云分析。
复杂性分析
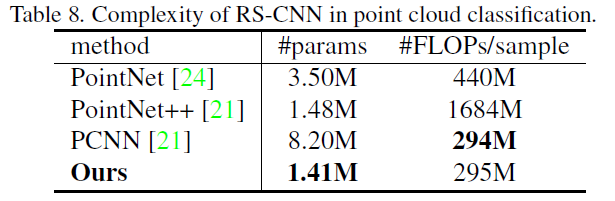
表8总结了空间(params数)和时间(浮点运算/采样)的RS-CNN分类复杂度,其中1024点作为输入。与PointNet [24]相比,RS-CNN减少了59.7%的参数、将FLOP减少了32.9%,这显示了其在实时应用方面的巨大潜力,例如自动驾驶中的场景解析。
五、总结
在这项工作中,提出了RS-CNN,即关系形状卷积神经网络,它将规则网格CNN扩展到不规则配置以进行点云分析。RS-CNN的核心是一种新颖的卷积算子,它可以从关系(即点之间的几何拓扑约束)中学习。通过这种方式,可以对点的空间布局进行明确的推理,从而获得有区别的形状意识。此外,还可以获得几何关系的良好特性,例如对刚性变换的鲁棒性。结果,配备有该运算符的RSCNN可以实现上下文形状感知学习,从而使其高效。跨三个任务的具有挑战性的基准测试的广泛实验,以及详尽的经验和理论分析,证明RS-CNN达到了最先进的水平。
六、代码分析
(略)
参考:https://blog.csdn.net/Dujing2019/article/details/104387630/?utm_medium=distribute.pc_relevant.none-task-blog-title-2&spm=1001.2101.3001.4242
https://www.cnblogs.com/SuperLab/p/11672161.html
论文笔记:(CVPR2019)Relation-Shape Convolutional Neural Network for Point Cloud Analysis的更多相关文章
- Relation-Shape Convolutional Neural Network for Point Cloud Analysis(CVPR 2019)
代码:https://github.com/Yochengliu/Relation-Shape-CNN 文章:https://arxiv.org/abs/1904.07601 作者直播:https:/ ...
- ASPLOS'17论文导读——SC-DCNN: Highly-Scalable Deep Convolutional Neural Network using Stochastic Computing
今年去参加了ASPLOS 2017大会,这个会议总体来说我感觉偏系统和偏软一点,涉及硬件的相对少一些,对我这个喜欢算法以及硬件架构的菜鸟来说并不算非常契合.中间记录了几篇相对比较有趣的paper,今天 ...
- 论文翻译:2019_TCNN: Temporal convolutional neural network for real-time speech enhancement in the time domain
论文地址:TCNN:时域卷积神经网络用于实时语音增强 论文代码:https://github.com/LXP-Never/TCNN(非官方复现) 引用格式:Pandey A, Wang D L. TC ...
- 论文笔记:ReNet: A Recurrent Neural Network Based Alternative to Convolutional Networks
ReNet: A Recurrent Neural Network Based Alternative to Convolutional Networks2018-03-05 11:13:05 ...
- 论文笔记之:Decoupled Deep Neural Network for Semi-supervised Semantic Segmentation
Decoupled Deep Neural Network for Semi-supervised Semantic Segmentation xx
- 论文笔记《Notes on convolutional neural networks》
这是个06年的老文章了,但是很多地方还是值得看一看的. 一.概要 主要讲了CNN的Feedforward Pass和 Backpropagation Pass,关键是卷积层和polling层的BP推导 ...
- 论文笔记之《Event Extraction via Dynamic Multi-Pooling Convolutional Neural Network》
1. 文章内容概述 本人精读了事件抽取领域的经典论文<Event Extraction via Dynamic Multi-Pooling Convolutional Neural Networ ...
- A NEW HYPERSPECTRAL BAND SELECTION APPROACH BASED ON CONVOLUTIONAL NEURAL NETWORK文章笔记
A NEW HYPERSPECTRAL BAND SELECTION APPROACH BASED ON CONVOLUTIONAL NEURAL NETWORK 文章地址:https://ieeex ...
- 论文阅读(Weilin Huang——【TIP2016】Text-Attentional Convolutional Neural Network for Scene Text Detection)
Weilin Huang--[TIP2015]Text-Attentional Convolutional Neural Network for Scene Text Detection) 目录 作者 ...
随机推荐
- C#调百度通用翻译API翻译HALCON的示例描述
目录 准备工作 参数简介 输入参数 输出参数 使用HttpClient 翻译工具类 应用:翻译HALCON的示例描述 准备工作 HALCON示例程序的描述部分一直是英文的,看起来很不方便.我决定汉化一 ...
- 如何利用Python计算景观指数AI
可使用工具包 pylandstats 此工具包基本是根据fragstats形成的,大部分fragstats里面的景观指数,这里都可以计算.但是,还是有一小部分指数这里没有涉及. LS_METRICS ...
- kubernetes之副本控制器(RC/RS)
1.了解ReplicationController ReplicationController是一种kubernetes资源,可确保它的pod始终保持运行状态. 如果pod因任何原因消失(例如节点从集 ...
- Redis的主从数据一致性
我们学习了 AOF 和 RDB,如果 Redis 发生了宕机,它们可以分别通过回放日志和重新读入 RDB 文件的方式恢复数据,从而保证尽量少丢失数据,提升可靠性.不过,即使用了这两种方法,也依然存在服 ...
- hbuilder 开发app 自动升级
使用huilder 开发app ,实现app升级功能 1. var wgtVer = null; //用于获取系统当前版本 var currentversion = null; //用于获取系统最新 ...
- 如何获取微信小程序for循环的index
在微信小程序开发中,对于wx:for,可以使用wx:for-index="index"来获取数组中的元素的索引值(下标). <view class="item&qu ...
- 国内CRM客户管理系统哪个好用
在企业管理者对CRM系统进行选择的时候,面对搜索引擎上各种各样的结果和各种广告,肯定会有这样的疑问:CRM客户管理系统到底是哪一个好?除了网络上那些为了广告效果而"夸大其词"的优点 ...
- PHP常见的设计模式
设计模式六大原则 开放封闭原则:一个软件实体如类.模块和函数应该对扩展开放,对修改关闭. 里氏替换原则:所有引用基类的地方必须能透明地使用其子类的对象. 依赖倒置原则:高层模块不应该依赖低层模块,二者 ...
- challenge
一.查壳 无壳的64位linux文件 二.拖入ida静态分析 F5反编译一下. 发现这段代码实际意义就是把字符串传进v7当中.v7的值就是flag值. 这个函数整体分析下来,各种递归,尝试用c语言来复 ...
- HCNA Routing&Switching之静态路由
前文我们聊到了路由的相关概念和路由基础方面的话题,回顾请参考https://www.cnblogs.com/qiuhom-1874/p/14947897.html:今天我们聊聊静态路由相关话题: 回顾 ...