立体像对空间前方交会-共线方程求解法(python实现)
一、原理

二、步骤
a.用各自像片的角元素计算出左右像片的旋转矩阵R1和R2。
b.有同名像点列出共线方程。
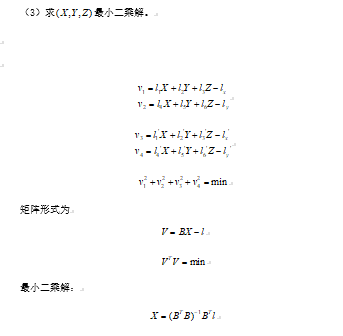
c.将方程写为未知数的线性方程形式,计算线性系数。
d.写出误差方程,系数矩阵与常数项。
e.计算未知点的最小二乘解。
f.重复以上步骤完成所有点的地面坐标的计算。
三、示例代码
# -*- coding: utf-8 -*-
"""
Created on Mon Nov 25 09:38:08 2019 @author: L JL
"""
import numpy as np
import math as m def r_mat(f,w,k):
Rf = np.mat([[m.cos(f), 0, -m.sin(f)],
[0, 1, 0],
[m.sin(f), 0, m.cos(f)]]) Rw = np.mat([[1, 0, 0],
[0, m.cos(w), -m.sin(w)],
[0, m.sin(w), m.cos(w)]]) Rk = np.mat([[m.cos(k), -m.sin(k), 0],
[m.sin(k), m.cos(k), 0],
[0, 0, 1]]) R = Rf*Rw*Rk return R def l_mat(In,R,coor):
l = np.mat(np.zeros((2,3)))
f = In[0,2]
xo = In[0,0]
yo = In[0,1]
x = coor[0]
y = coor[1] l[0,0] = f*R[0,0] + (x-xo)*R[0,2]
l[0,1] = f*R[1,0] + (x-xo)*R[1,2]
l[0,2] = f*R[2,0] + (x-xo)*R[2,2]
l[1,0] = f*R[0,1] + (y-yo)*R[0,2]
l[1,1] = f*R[1,1] + (y-yo)*R[1,2]
l[1,2] = f*R[2,1] + (y-yo)*R[2,2] return l def l_approximate(In,R,coor,Ex):
l_app = np.mat(np.zeros((2,1)))
f = In[0,2]
xo = In[0,0]
yo = In[0,1]
x = coor[0]
y = coor[1]
Xs = Ex[0,0]
Ys = Ex[1,0]
Zs = Ex[2,0] l_app[0,0] = (f*R[0,0]*Xs + f*R[1,0]*Ys + f*R[2,0]*Zs
+ (x-xo)*R[0,2]*Xs + (x-xo)*R[1,2]*Ys + (x-xo)*R[2,2]*Zs)
l_app[1,0] = (f*R[0,1]*Xs + f*R[1,1]*Ys + f*R[2,1]*Zs
+ (y-yo)*R[0,2]*Xs + (y-yo)*R[1,2]*Ys + (y-yo)*R[2,2]*Zs) return l_app #main
left_HomonymousImagePoints = [0.153,91.798]
right_HomonymousImagePoints = [-78.672,89.122] left_In = np.mat([0,0,152.91])
left_Ex = np.mat([[970302.448784],
[-1138644.971216],
[3154.584941],
[0.010425],
[-0.012437],
[0.003380]])
right_In = np.mat([0,0,152.91])
right_Ex = np.mat([[971265.303768],
[-1138634.245942],
[3154.784258],
[0.008870],
[-0.005062],
[-0.008703]]) R_L = np.mat(np.zeros((3,3)))
R_R = np.mat(np.zeros((3,3)))
L = np.mat(np.zeros((4,3)))
L_app = np.mat(np.zeros((4,1))) R_L = r_mat(left_Ex[3,0],left_Ex[4,0],left_Ex[5,0])
R_R = r_mat(right_Ex[3,0],right_Ex[4,0],right_Ex[5,0])
L[0:2,:] = l_mat(left_In,R_L,left_HomonymousImagePoints)
L[2:4,:] = l_mat(right_In,R_R,right_HomonymousImagePoints)
L_app[0:2,0] = l_approximate(left_In,R_L,left_HomonymousImagePoints,left_Ex)
L_app[2:4,0] = l_approximate(right_In,R_R,right_HomonymousImagePoints,right_Ex) GPCoordinates = np.mat(np.zeros((3,1))) GPCoordinates = (L.T * L).I * L.T * L_app print("左影像同名点:",left_HomonymousImagePoints)
print("左影像同名点:",right_HomonymousImagePoints)
print("地面点坐标:\n X=%f,\n Y=%f,\n Z=%f"
%(GPCoordinates[0,0],GPCoordinates[1,0],GPCoordinates[2,0]))
立体像对空间前方交会-共线方程求解法(python实现)的更多相关文章
- 立体像对空间前方交会-点投影系数法(python实现)
一.原理 二.步骤 a.用各自像片的角元素计算出左右像片的旋转矩阵R1和R2. b.根据左右像片的外方位元素计算摄影基线分量Bx,By,Bz. c.逐点计算像点的空间辅助坐标. d.计算投影系数. e ...
- MATLAB线性方程组的迭代求解法
MATLAB线性方程组的迭代求解法 作者:凯鲁嘎吉 - 博客园http://www.cnblogs.com/kailugaji/ 一.实验目的 1. 借助矩阵按模最大特征值,判断解方程组的Jacobi ...
- UVA725 Division (暴力求解法入门)
uva 725 Division Write a program that finds and displays all pairs of 5-digit numbers that between t ...
- 今天建了一个Python学习交流的QQ群,求喜欢python的一起来交流。
版权归作者所有,任何形式转载请联系作者.作者:枫(来自豆瓣)来源:https://www.douban.com/note/666182545/ 现在学python的人越来越多了,我也开始学习了,大群里 ...
- 中缀表达式变后缀表达式、后缀表达式(逆波兰)求值(python版本)
定义: 中缀表达式: 在通常的表达式中,二元运算符总是置于与之相关的两个运算对象之间,这种表示法也称为中缀表达式 后缀表达式: 又叫逆波兰表达式 ,不包含括号,运算符放在两个运算对象的后面,所有的计算 ...
- Leetcode 234 Palindrome Linked List 复杂度为时间O(n) 和空间(1)解法
1. 问题描写叙述 给定一个单链表,推断其内容是不是回文类型. 比如1–>2–>3–>2–>1.时间和空间复杂都尽量低. 2. 方法与思路 1)比較朴素的算法. 因为给定的数据 ...
- Linux服务器CPU、内存、磁盘空间、负载情况查看python脚本
[本文出自天外归云的博客园] 网上搜,东拼西凑,组装了一个可以查Linux服务器CPU使用率.内存使用率.磁盘空间占用率.负载情况的python脚本. 脚本内容如下: # -*- coding:utf ...
- ACM1174_爆头解题思路_空间三维坐标求点到直线的距离
/* 爆头 Description gameboy是一个CS高手,他最喜欢的就是扮演警察, 手持M4爆土匪的头.也许这里有人没玩过CS,有必 要介绍一下“爆头”这个术语:所谓爆头,就是子 弹直接命中对 ...
- 均值滤波器(平滑空间滤波器)基本原理及Python实现
1. 基本原理 使用元素的领域内像素的平均值代替该元素,可明显的降低图像灰度的尖锐变换.它的一种重要应用是模糊处理:得到感兴趣的区域的粗略表示,将次要的/小的元素与背景融合,使得主要的/较大的元素变得 ...
随机推荐
- Firefox disable search in the address bar
disable search in the address bar Hi oitconz, setting keyword.enabled to false prevents Firefox from ...
- CMU Database Systems - Storage and BufferPool
Database Storage 存储分为volatile和non-volatile,越快的越贵越小 那么所以要解决的第一个问题就是,如果尽量在有限的成本下,让读写更快些 意思就是,尽量读写volat ...
- openstack kvm cannot set up guest memory 'pc.ram': Cannot allocate memory
Kvm:启动报错:error: internal error: process exited while connecting to monitor: 2018-11-12T01:47:14.9933 ...
- TypedValue: 使用TypedValue将dip值转换成px值
之前自己一直手工编写函数来实现dip值到px值,今天无意中发现android本身就带有类似的函数来实现这种转换过程,就是 TypedValue.applyDimension public class ...
- openresty开发系列4--nginx的配置文件说明
openresty开发系列4--nginx的配置文件说明 Nginx基本配置 Nginx的主配置文件是:nginx.conf,nginx.conf主要组成如下: # 全局区 有一个工作子进程,一般 ...
- oracle存储过程中%type的含义
转: oracle存储过程中%type的含义 2018-11-07 11:43:56 lizhi_ma 阅读数 1361更多 分类专栏: 数据库 版权声明:本文为博主原创文章,遵循CC 4.0 B ...
- linux非root用户安装rabbitmq
因为rabbitmq是用erlang语言写的,所以装rabbitmq前第一步得先装erlang. 我们到erlang官网https://www.erlang.org/downloads下载安装包,最新 ...
- ES6深入浅出-10 ES6新增的数据类型-3.其他类型
Map类型 Map 类型 https://developer.mozilla.org/zh-CN/docs/Web/JavaScript/Reference/Global_Objects/Map Ma ...
- 【composer】 PHP composer 镜像地址更换
如果你使用的是 laravel-china.org 得 composer 镜像.那么近期执行更新时候就会报错: 莫慌,这是因为 laravel-china.org 已经停止了对composer得更新. ...
- delphi self.Update 什么作用
更新指定窗口的客户区.如果窗口更新的区域不为空,UpdateWindow函数就发送一个WM_PAINT消息来更新指定窗口的客户区.函数绕过应用程序的消息队列,直接发送WM_PAINT消息给指定窗口的窗 ...