yolo进化史之yolov3
yolov3的论文写的比较简略,不看yolov1,yolov2很难直接看懂. 建议先看v1,v2论文.
yolov3主要做了几点改进
- 改进了特征提取部分的网络结构
- 多尺度预测
- 分类由softmax改为logistic
前面2个改进使得yolo对小目标的检测效果更好.
特征提取网络
由darknet19变为darknet53.
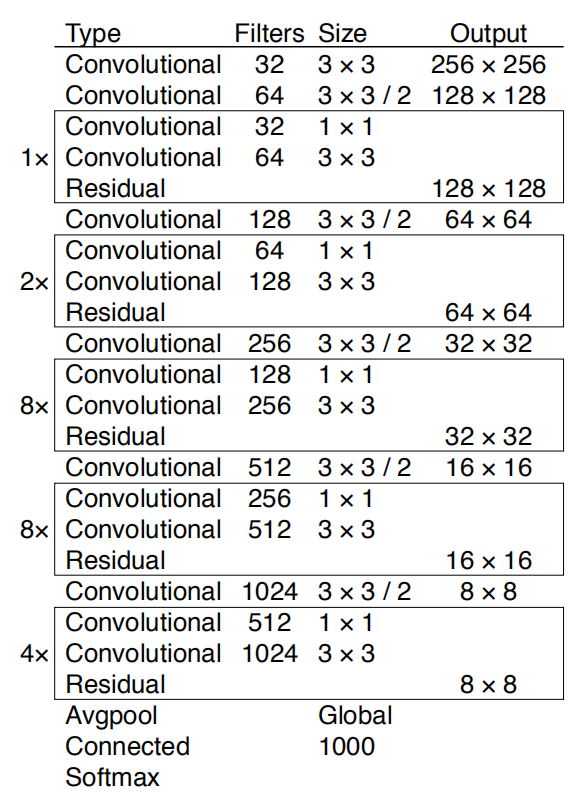
借鉴了resnet.
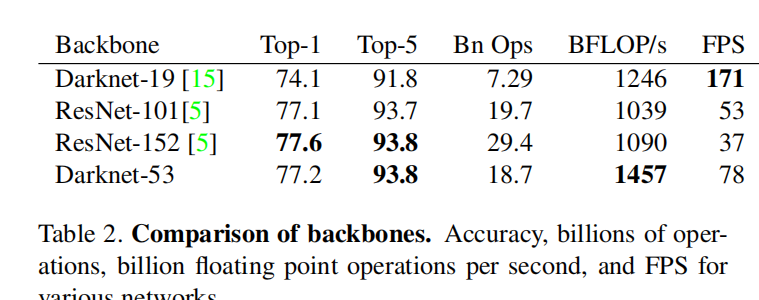
这个特征网络结构的变更是yolov3检测效果更好的一个重要原因.
多尺度预测
其实yolov2中就有了类似的想法,把不同layer的feature map连接起来成为新的feature map.也就是所谓的passthrough.但是yolov2中的这种做法得到的还是一个feature map.
yolov3中引入了多尺度的概念,生成好几种不同尺度的feature map.不同的feature map负责预测不同大小的目标.
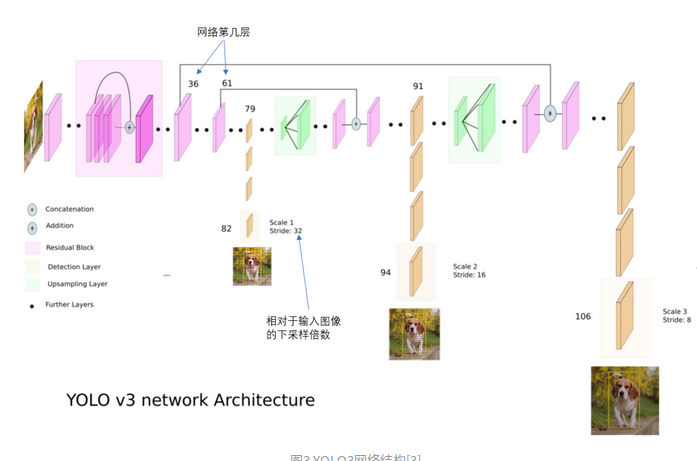
coco数据集聚类出来9个先验框:(10×13),(16×30),(33×23),(30×61),(62×45),(59×119),(116 × 90),(156 × 198),(373 × 326).
以416 x 416为例,yolov3最终生成13 x 13,26 x 26,52 x 52三种feature map.分别负责不同大小的目标预测. 越小分辨率的feature map负责越大的目标.

多尺度的引入使得能够预测的box多了很多.
分类由softmax改为logistic
解决了一个目标属于多个类别的问题.将softmax改为多个独立的logistic分类器,这样就可以预测出多个label.
instead we simply use independent logistic classifiers. During training we use binary cross-entropy loss for the class
predictions.
参考:https://pjreddie.com/media/files/papers/YOLOv3.pdf , https://www.jianshu.com/p/d13ae1055302
yolo进化史之yolov3的更多相关文章
- 目标检测YOLO进化史之yolov1
yolov3在目标检测领域可以算得上是state-of-art级别的了,在实时性和准确性上都有很好的保证.yolo也不是一开始就达到了这么好的效果,本身也是经历了不断地演进的. yolov1 测试图片 ...
- yolo进化史之yolov2
yolov1和当时最好的目标检测系统相比,有很多缺点.比如和Fast R-CNN相比,定位错误更多.和基于区域选择的目标检测方法相比,recall也比较低.yolov2的目标即在保证分类准确度的情况下 ...
- AI佳作解读系列(二)——目标检测AI算法集杂谈:R-CNN,faster R-CNN,yolo,SSD,yoloV2,yoloV3
1 引言 深度学习目前已经应用到了各个领域,应用场景大体分为三类:物体识别,目标检测,自然语言处理.本文着重与分析目标检测领域的深度学习方法,对其中的经典模型框架进行深入分析. 目标检测可以理解为是物 ...
- 检测算法简介及其原理——fast R-CNN,faster R-CNN,YOLO,SSD,YOLOv2,YOLOv3
1 引言 深度学习目前已经应用到了各个领域,应用场景大体分为三类:物体识别,目标检测,自然语言处理.本文着重与分析目标检测领域的深度学习方法,对其中的经典模型框架进行深入分析. 目标检测可以理解为是物 ...
- 小白也能弄懂的目标检测之YOLO系列 - 第一期
大家好,上期分享了电脑端几个免费无广告且实用的录屏软件,这期想给大家来讲解YOLO这个算法,从零基础学起,并最终学会YOLOV3的Pytorch实现,并学会自己制作数据集进行模型训练,然后用自己训练好 ...
- 目标检测网络之 YOLOv3
本文逐步介绍YOLO v1~v3的设计历程. YOLOv1基本思想 YOLO将输入图像分成SxS个格子,若某个物体 Ground truth 的中心位置的坐标落入到某个格子,那么这个格子就负责检测出这 ...
- 一文带你学会使用YOLO及Opencv完成图像及视频流目标检测(上)|附源码
计算机视觉领域中,目标检测一直是工业应用上比较热门且成熟的应用领域,比如人脸识别.行人检测等,国内的旷视科技.商汤科技等公司在该领域占据行业领先地位.相对于图像分类任务而言,目标检测会更加复杂一些,不 ...
- 【转】目标检测之YOLO系列详解
本文逐步介绍YOLO v1~v3的设计历程. YOLOv1基本思想 YOLO将输入图像分成SxS个格子,若某个物体 Ground truth 的中心位置的坐标落入到某个格子,那么这个格子就负责检测出这 ...
- YOLOv3和YOLOv4长篇核心综述(上)
YOLOv3和YOLOv4长篇核心综述(上) 对目标检测算法会经常使用和关注,比如Yolov3.Yolov4算法. 实际项目进行目标检测任务,比如人脸识别.多目标追踪.REID.客流统计等项目.因此目 ...
随机推荐
- grep文本搜索工具详解
############grep命令############这个命令属于文本处理三大命令之一,强大的文本搜索工具(贪婪模式)全面搜索正则表达式并把行打印出来)是一种强大的文本搜索工具,它能使用正则表达 ...
- Sqlserver 使用.net查询被事务锁住处理
在有些应用场景中.事务开了后或能需要再去调用某个DAL读取表中的数据.但DAL里又是新开的链接,由于外面有事务所以这里读的时候就读不到.这种情况下可以在这个DAL的查询里开一个新的事务级别设为允许脏读 ...
- python+appium自动化测试(一)-----环境搭建
基础背景: windows7系统 +python3.4版本 环境搭建目标: 使用python编写app自动化测试脚本并成功执行. 搭建步骤: 1.安装python3,安装步骤详见:https:// ...
- nginx之gzip压缩提升网站速度
目录: 为啥使用gzip压缩 nginx使用gzip gzip的常用配置参数 nginx配置gzip 注意 为啥使用gzip压缩 开启nginx的gzip压缩,网页中的js,css等静态资源的大小会大 ...
- Arduino 常用函数参考文档
封装好的API,使得程序中的语句更容易被理解,我们不用理会单片机中繁杂的寄存器配置,就能直观的控制Arduino,增强程序可读性的同时,也提高了开发效率. 本篇主要介绍: 一,项目结构 1.setup ...
- 二阶段js 入门知识点 自我总结复习
二阶段自我总复习 1.javascript基础 : 客户端 安全性 跨平台 脚本语言 三大结构: 顺序 .选择.循环 顺序:运算符和表达式 ...
- Spring框架完全掌握(下)
接着上一篇文章的内容Spring框架完全掌握(上),我们继续深入了解Spring框架. Spring_AOP 考虑到AOP在Spring中是非常重要的,很有必要拿出来单独说一说.所以本篇文章基本上讲述 ...
- Nacos(八):Nacos持久化
参考和感谢 Spring Cloud Alibaba基础教程:Nacos的数据持久化 前言 前景回顾: Nacos(七):Nacos共享配置 Nacos(六):多环境下如何"管理" ...
- 2019年 iPad无法充电
2019年 iPad无法充电 到售后网点检测没毛病,可能是apple产品做了低温保护逻辑机制低温无法充电,或者说是冬天温度跟iPad电池充电温度要求不符.各位有遇到情况的可以看看是不是这种问题,这问 ...
- 《Effective Java第二版》总结
第1条:考虑用静态工厂方法代替构造器 通常我们会使用 构造方法 来实例化一个对象,例如: // 对象定义 public class Student{ // 姓名 private String name ...