4.3 ROS工作空间覆盖
4.3 ROS工作空间覆盖
所谓工作空间覆盖,是指不同工作空间中,存在重名的功能包的情形。
ROS 开发中,会自定义工作空间且自定义工作空间可以同时存在多个,可能会出现一种情况: 虽然特定工作空间内的功能包不能重名,但是自定义工作空间的功能包与内置的功能包可以重名或者不同的自定义的工作空间中也可以出现重名的功能包,那么调用该名称功能包时,会调用哪一个呢?比如:自定义工作空间A存在功能包 turtlesim,自定义工作空间B也存在功能包 turtlesim,当然系统内置空间也存在turtlesim,如果调用turtlesim包,会调用哪个工作空间中的呢?
实现
0.新建工作空间A与工作空间B,两个工作空间中都创建功能包: turtlesim。
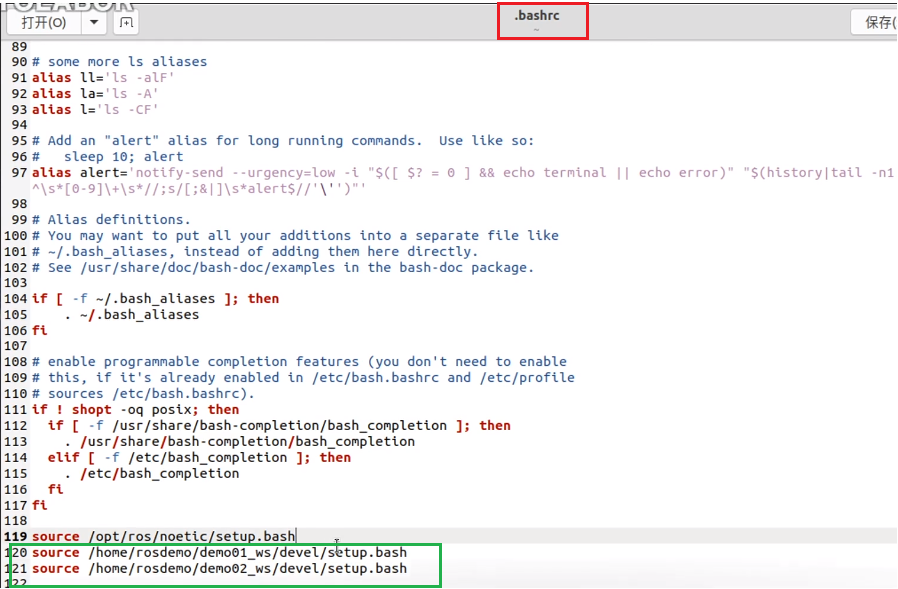
1.在 ~/.bashrc 文件下追加当前工作空间的 bash 格式如下:
source /home/用户/路径/工作空间A/devel/setup.bash
source /home/用户/路径/工作空间B/devel/setup.bas
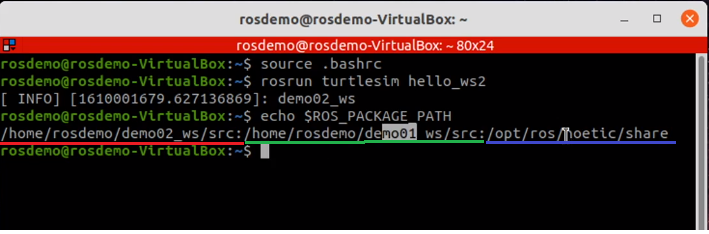
2.新开命令行:source .bashrc加载环境变量
3.查看ROS环境环境变量echo $ROS_PACKAGE_PATH
结果:自定义工作空间B:自定义空间A:系统内置空间
4.调用命令:roscd turtlesim会进入自定义工作空间B
原因
ROS 会解析 .bashrc 文件,并生成 ROS_PACKAGE_PATH ROS包路径,该变量中按照 .bashrc 中配置设置工作空间优先级,在设置时需要遵循一定的原则:ROS_PACKAGE_PATH 中的值,和 .bashrc 的配置顺序相反--->后配置的优先级更高,如果更改自定义空间A与自定义空间B的source顺序,那么调用时,将进入工作空间A。
结论
功能包重名时,会按照 ROS_PACKAGE_PATH 查找,配置在前的会优先执行。
隐患
存在安全隐患,比如当前工作空间B优先级更高,意味着当程序调用 turtlesim 时,不会调用工作空间A也不会调用系统内置的 turtlesim,如果工作空间A在实现时有其他功能包依赖于自身的 turtlesim,而按照ROS工作空间覆盖的涉及原则,那么实际执行时将会调用工作空间B的turtlesim,从而导致执行异常,出现安全隐患。
BUG 说明:
当在 .bashrc 文件中 source 多个工作空间后,可能出现的情况,在 ROS PACKAGE PATH 中只包含两个工作空间,可以删除自定义工作空间的 build 与 devel 目录,重新 catkin_make,然后重新载入 .bashrc 文件,问题解决。
4.3 ROS工作空间覆盖的更多相关文章
- 创建一个ROS工作空间(ROS Workspace)
详细参照 http://wiki.ros.org/ROS/Tutorials/InstallingandConfiguringROSEnvironment1.mkdir -p ~/catkin_ws/ ...
- ROS Learning-003 beginner_Tutorials 创建ROS工作空间
ROS Indigo beginner_Tutorials-02 创建ROS工作空间 我使用的虚拟机软件:VMware Workstation 11 使用的Ubuntu系统:Ubuntu 14.04. ...
- ros 工作空间下cpp文件调用其他cpp文件的函数或变量
最近在学习ros节点编程,在工作空间下添加如下文件: message.h #ifndef MESSAGE_H #define MESSAGE_H extern int n; void init_ros ...
- 创建ROS 工作空间时出现:程序“catkin_init_workspace”尚未安装,程序“catkin_make”尚未安装。
问题:创建ROS 工作空间时出现:程序“catkin_init_workspace”尚未安装,程序“catkin_make”尚未安装. 解决方法: source /opt/ros/kinetic/se ...
- QT打开ROS工作空间时遇到的问题和解决方法
之前一直觉得不用IDE写程序看着好像我很能的样子. 其实就相当于工业时代我还钻木取火并且告诉别人你们用打火机根本不知道火被点燃的过程是怎样的. 因为这个技能并非人人都会,就可以拿出去到处臭屁 好了, ...
- 多个ROS工作空间常见的问题
1. 在/home/user_name/.bashrc文件中写入多个工作空间的环境变量,这样会导致环境变量之间相互覆盖.最常见的问题就是找不到工作空间中某个launch文件.节点.rviz插件等. 解 ...
- ROS工作空间和程序包创建
预备工作后面操作中我们将会用到ros-tutorials程序包,请先安装: $ sudo apt-get install ros-<distro>-ros-tutorials 将 < ...
- (二)创建ROS工作空间
ROS 教程中涉及的和编写的所有 ROS 代码需要有一个地方存放它,这个地方叫做工作空间.可以说,这个工作空间应该是一个大的集合.当我们要编译程序的时候,我们是对整个工作空间进行编译的. 这个工作空 ...
- 创建ROS工作空间和包
一.创建工作空间 mkdir -p ~/openni_ws/src cd ~/openni_ws catkin_make //在catkin工作空间(openni_ws)下catkin_ ...
随机推荐
- Linux运维实战——如何利用文件节点删除乱码文件
引言 linux系统中删除文件可以用rm [filename] 命令,然而有些系统或程序自动生成的文件或者文件夹名称却是乱码. 虽然部分文件/文件夹可以通过复制粘贴名字的方式来删除,但是仍然有些文件无 ...
- tput用法详解-渐入佳境
--作者:飞翔的小胖猪 --创建时间:2021年2月28日 tput 命令将通过 terminfo 数据库对终端会话进行初始化和操作. 主要功能为:移动更改光标.更改文本属性颜色.清除屏幕特定区域. ...
- Spark分区数、task数目、core数目、worker节点数目、executor数目梳理
Spark分区数.task数目.core数目.worker节点数目.executor数目梳理 spark隐式创建由操作组成的逻辑上的有向无环图.驱动器执行时,它会把这个逻辑图转换为物理执行计划,然后将 ...
- 配置异常拦截处理以及与javabean字段验证的完美结合
Spring 3.2提供了强大的新注解 @ControllerAdvice,主要是用来Controller的一些公共的需求的低侵入性增强提供辅助,作用于@RequestMapping标注的方法上. ...
- Qt:输出为CSV文件时汉字乱码
参考 (18条消息) QT5写csv文件,文件打开后中文显示乱码的问题解决_yanzi150207348的博客-CSDN博客 解决方法 1.在文件开头写一段: #if _MSC_VER >= 1 ...
- WPS:公式在中间,编号靠右
1.新建表格1*3 2.在中间单元格内输入公式,在右边单元格中输入编号 3.在"开始"菜单栏找到"居中"和"靠右"两个按钮,给中间单元格设置 ...
- 进程&线程(二):Thread相关方法与属性
学习自:python进程.线程.协程 - 张岩林 - 博客园 1.threading.Thread Thread方法 方法(使用方法为Thread.xxx) 说明 start() 激活线程 getNa ...
- Spring注解简析
JAVA 元注解 @Documented @Inherited @Retention @Target @Repeatable @Native 在java.lang.annotation包下,除了@Na ...
- SQL从零到迅速精通【表连接查询】
看了这些表连接,个人感觉'左外连接'.'右外连接'和'全外连接'应用好就可以了. 1.外连接 (1)LEFT JOIN(左连接):返回包括左表中的所有记录和右表中连接字段相等的记录. 在student ...
- 问题排查利器:Linux 原生跟踪工具 Ftrace 必知必会
本文地址:https://www.ebpf.top/post/ftrace_tools TLDR,建议收藏,需要时查阅. 如果你只是需要快速使用工具来进行问题排查,包括但不限于函数调用栈跟踪.函数调用 ...