6 Sampling Configuration Space: 6.4 Adaptive Steered Molecular Dynamics
6.4 Adaptive Steered Molecular Dynamics
理论背景:
SMD 利用施加steering力的伪粒子,以便以特定速度穿过反应坐标。 这个外力允许人们在MD模拟时间尺度的范围内观察分子的变化。 采用 Jarzynski 等式,在 SMD 模拟期间对系统执行的非平衡功可能与状态 A 和 B 之间的自由能差有关
ASMD整体感觉相当于“多条SMD+JE等式,然后取平均” 的另一种方式。对于SMD来说,必须多次运行,才能获得收敛的PMF曲线。ASMD已经被证明可以缓解这个问题,在ASMD中,预定的反应坐标被划分为段,在这些段中执行SMD,并在这个段中计算Jarzynski average (JA) 。在段之间,选择“work value”最接近JA平均值的轨迹,使用这个轨迹的最终坐标rst7用于初始化下一段的SMD。 这样,可以减少需要执行的SMD轨迹数量。
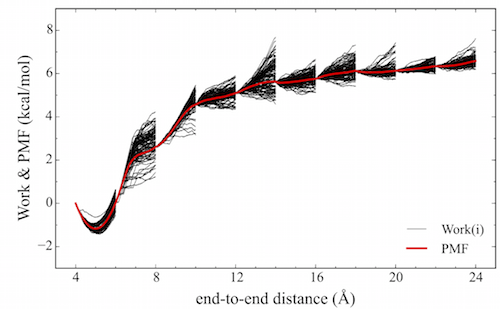
从 ASMD 模拟中获得的PMF(红色)示意图。 此外,突出显示的是每个段的work 分布(黑色)
计算过程:
1、首先对体系进行经典的MD,获得平衡构型。
2、执行ASMD
这一部分可以参考官网(http://ambermd.org/tutorials/advanced/tutorial26/section2.php),给出了shell脚本,可以方便地产生不同阶段的输入。
大致过程就是先将反应坐标分为若干段。首先考察第一段,运行多次SMD后,使用脚本计算Jarzynski average (JA),然后找到与JA最接近的SMD轨迹,然后使用这个SMD轨迹的最后一帧作为考察第二段的初始坐标,依次往后进行。
注意:①确定拉动速度→比如说100埃/ns,一共要拉伸4埃,那么拉伸的时间就设置为20000步(40000fs)②SMD会自动产生“目标距离,实际距离,力,和功”
3、重构PMF
ASMD完成后,需要拼接每个阶段的PMF输出,以获得不同速度下每个模拟的实际 PMF。这里提供了脚本 create.PMF.py. ,可以轻松完成这个工作。
6 Sampling Configuration Space: 6.4 Adaptive Steered Molecular Dynamics的更多相关文章
- 机器人学 —— 轨迹规划(Configuration Space)
之前的轨迹规划中,我们只考虑了质点,没有考虑机器人的外形与结构.直接在obstacle map 中进行轨迹规划,然而世纪情况中,机器人有固定外形,可能会和障碍物发生碰撞.此情况下,我们针对机器人自由度 ...
- 机器人运动规划中的构形空间(Configuration Space)
A key concept in motion planning is configuration space, or C-space for short. Every point in the C- ...
- Adaptive Synchronization of Dynamics on Evolving Complex Networks
原文链接:https://journals.aps.org/prl/abstract/10.1103/PhysRevLett.100.114101 发表在:PRL 2008 ------------- ...
- PCI & PCIE Configuration Register Space
1.PCI-Compatible Configurationbits [1:0] are hard-wired, read-only and must return zeros when read.b ...
- 机器人学 —— 轨迹规划(Sampling Method)
上一篇提到,机器人轨迹规划中我们可以在 Configuration Space 中运行A* 或者 DJ 算法.无论A* 还是DJ 算法,都必须针对邻域进行搜索,如果2自由度则有4邻域,2自由度则有8邻 ...
- [中英对照]Device Drivers in User Space: A Case for Network Device Driver | 用户态设备驱动: 以网卡驱动为例
前文初步介绍了Linux用户态设备驱动,本文将介绍一个典型的案例.Again, 如对Linux用户态设备驱动程序开发感兴趣,请阅读本文,否则请飘过. Device Drivers in User Sp ...
- zhihu spark集群,书籍,论文
spark集群中的节点可以只处理自身独立数据库里的数据,然后汇总吗? 修改 我将spark搭建在两台机器上,其中一台既是master又是slave,另一台是slave,两台机器上均装有独立的mongo ...
- Procedural graphics architectures and techniques
BACKGROUND The evolution of graphics rendering technology has led to the development of procedural t ...
- Massively parallel supercomputer
A novel massively parallel supercomputer of hundreds of teraOPS-scale includes node architectures ba ...
- Monitoring and Tuning the Linux Networking Stack: Receiving Data
http://blog.packagecloud.io/eng/2016/06/22/monitoring-tuning-linux-networking-stack-receiving-data/ ...
随机推荐
- 有关箭头函数的this知识
总结: 结果: 2,箭头函数正确的使用方法. 结果: 总结: 箭头函数不要直接在对象的属性上用.比如上面的函数3.
- angular的发布订阅
import subject from "nxjs/subject"; let sub = new subject(); //发布订阅 sub.subscribe(data=> ...
- ORACLE 数据库备份脚本(数据泵2-指定用户)
#!/bin/bash export NLS_LANG=AMERICAN_AMERICA.ZHS16GBK #定义字符集RQ=`date +20%y-%m-%d` #创建数据泵目录directory, ...
- 语言-页面-模板-Velocity
Velocity教程 - 简书 (jianshu.com) Velocity模板引擎详解 - Velocity 教程 | 编程字典 (codingdict.com) Velocity模板(VM)语言介 ...
- DB2日常维护操作
一. DB2日常维护操作 1.数据库的启动.停止.激活 db2 list active databases db2 active db 数据库名 db2start --启动 db2stop [forc ...
- VMware 15pro虚拟机网络设置
在关闭虚拟机的情况下:VM 15pro. 编辑->虚拟网络编辑器:
- Byte流的压缩小技巧
使用Lz4: public class Lz4Tool { public static byte[] CompressBytes(byte[] bytes) { return LZ4Codec.Wra ...
- 第一课 Markdown 实操
1.Markdown (#加空格) 二级标题 (##加空格) 三级标题 (###加空格) 四级标题 (####加空格) 2.字体 Hello world 加粗(字体2边加**) Hello world ...
- python机器学习——SVM支持向量机
背景与原理: 支持向量机是一种用来解决分类问题的算法,其原理大致可理解为:对于所有$n$维的数据点,我们希望能够找到一个$n$维的直线(平面,超平面),使得在这个超平面一侧的点属于同一类,另一侧的点属 ...
- plsql链接oracle
安装两个oracle文件夹在一个database中,安装plsql 要先配置两个都要修改,不然会找不到服务器 管理员运行 监听服务/监听位置和数据库服务都要修改 ass文件---监听程序配置 和本场 ...