蜕变成蝶~Linux设备驱动之异步通知和异步I/O

在设备驱动中使用异步通知可以使得对设备的访问可进行时,由驱动主动通知应用程序进行访问。因此,使用无阻塞I/O的应用程序无需轮询设备是否可访问,而阻塞访问也可以被类似“中断”的异步通知所取代。异步通知类似于硬件上的“中断”概念,比较准确的称谓是“信号驱动的异步I/O"。
1、异步通知的概念和作用
影响:阻塞--应用程序无需轮询设备是否可以访问
非阻塞--中断进行通知
即:由驱动发起,主动通知应用程序
2、linux异步通知编程
2.1 linux信号
作用:linux系统中,异步通知使用信号来实现
函数原型为:
- void (*signal(int signum,void (*handler))(int)))(int)
原型比较难理解可以分解为
- typedef void(*sighandler_t)(int);
- sighandler_t signal(int signum,sighandler_t handler);
第一个参数是指定信号的值,第二个参数是指定针对前面信号的处理函数
2.2 信号的处理函数(在应用程序端捕获信号)
signal()函数
例子:
- //启动信号机制
- void sigterm_handler(int sigo)
- {
- char data[MAX_LEN];
- int len;
- len = read(STDIN_FILENO,&data,MAX_LEN);
- data[len] = 0;
- printf("Input available:%s\n",data);
- exit(0);
- }
- int main(void)
- {
- int oflags;
- //启动信号驱动机制
- signal(SIGIO,sigterm_handler);
- fcntl(STDIN_FILENO,F_SETOWN,getpid());
- oflags = fcntl(STDIN_FILENO,F_GETFL);
- fctcl(STDIN_FILENO,F_SETFL,oflags | FASYNC);
- //建立一个死循环,防止程序结束
- whlie(1);
- return 0;
- }
2.3 信号的释放 (在设备驱动端释放信号)
为了是设备支持异步通知机制,驱动程序中涉及以下3项工作
(1)、支持F_SETOWN命令,能在这个控制命令处理中设置filp->f_owner为对应的进程ID。不过此项工作已由内核完成,设备驱动无须处理。
(2)、支持F_SETFL命令处理,每当FASYNC标志改变时,驱动函数中的fasync()函数得以执行。因此,驱动中应该实现fasync()函数
(3)、在设备资源中可获得,调用kill_fasync()函数激发相应的信号
设备驱动中异步通知编程:
(1)、fasync_struct加入设备结构体模板中
(2)、两个函数
处理FASYNC标志的两个函数: int fasync_helper(int fd,struct file *filp,int mode,struct fasync_struct **fa);
释放信号的函数: void kill_fasync(struct fasync_struct **fa,int sig,int band);
和其他结构体指针放到设备结构体中,模板如下
- struct xxx_dev{
- struct cdev cdev;
- ...
- struct fasync_struct *async_queue;//异步结构体指针
- };
2.4 在设备驱动中的fasync()函数中,只需简单地将该函数的3个参数以及fasync_struct结构体指针的指针作为第四个参数传入fasync_helper()函数就可以了,模板如下
- static int xxx_fasync(int fd,struct file *filp, int mode)
- {
- struct xxx_dev *dev = filp->private_data;
- return fasync_helper(fd, filp, mode, &dev->async_queue);
- }
2.5 在设备资源可获得时应该调用kill_fasync()函数释放SIGIO信号,可读时第三个参数为POLL_IN,可写时第三个参数为POLL_OUT,模板如下
- static ssize_t xxx_write(struct file *filp,const char __user *buf,size_t count,loff_t *ppos)
- {
- struct xxx_dev *dev = filp->private_data;
- ...
- if(dev->async_queue)
- kill_fasync(&dev->async_queue,GIGIO,POLL_IN);
- ...
- }
2.6 最后在文件关闭时,要将文件从异步通知列表中删除
- int xxx_release(struct inode *inode,struct file *filp)
- {
- xxx_fasync(-1,filp,0);
- ...
- return 0;
- }
3、linux2.6异步I/O
同步I/O:linux系统中最常用的输入输出(I/O)模型是同步I/O,在这个模型中,当请求发出后,应用程序就会阻塞,知道请求满足
异步I/O:I/O请求可能需要与其它进程产生交叠
Linux 系统中最常用的输入/输出(I/O)模型是同步 I/O。在这个模型中,当请求发出之后,应用程序就会阻塞,直到请求满足为止。这是很好的一种解决方案,因为调用应用程序在等待 I/O 请求完成时不需要使用任何中央处理单元(CPU)。但是在某
些情况下,I/O 请求可能需要与其他进程产生交叠。可移植操作系统接口(POSIX)异步 I/O(AIO)应用程序接口(API)就提供了这种功能
4.1、AIO系列API:
aio_read--异步读
aio_read 函数的原型如下:
- int aio_read( struct aiocb *aiocbp );
aio_read()函数在请求进行排队之后会立即返回。如果执行成功,返回值就为 0;如果出现错误,返回值就为−1,并设置 errno 的值。
aio_write--异步写
aio_write()函数用来请求一个异步写操作,其函数原型如下:
- int aio_write( struct aiocb *aiocbp );
aio_write()函数会立即返回,说明请求已经进行排队(成功时返回值为 0,失败时返回值为−1,并相应地设置 errno。
aio_error--确定请求的状态
aio_error 函数被用来确定请求的状态,其原型如下:
- int aio_error( struct aiocb *aiocbp );
这个函数可以返回以下内容。
EINPROGRESS:说明请求尚未完成。
ECANCELLED:说明请求被应用程序取消了。
-1:说明发生了错误,具体错误原因由 errno 记录。
aio_return--获得异步操作的返回值
异步 I/O 和标准块 I/O 之间的另外一个区别是不能立即访问这个函数的返回状态,因为并没有阻塞在 read()调用上。在标准的 read()调用中,返回状态是在该函数返回时提供的。但是在异步 I/O 中,我们要使用 aio_return()函数。这个函数的原型如下:
- ssize_t aio_return( struct aiocb *aiocbp );
只有在 aio_error()调用确定请求已经完成(可能成功,也可能发生了错误)之后,才会调用这个函数。aio_return()的返回值就等价于同步情况中 read 或 write 系统调用的返回值(所传输的字节数,如果发生错误,返回值就为−1)。
aio_suspend--挂起异步操作,知道异步请求完成为止
aio_suspend()函数来挂起(或阻塞)调用进程,直到异步请求完成为止,此时会产生一个信号,或者发生其他超时操作。调用者提供了一个 aiocb 引用列表,其中任何一个完成都会导致 aio_suspend()返回。aio_suspend 的函数原型如下:
- int aio_suspend( const struct aiocb *const cblist[], int n, const struct timespec *timeout );
aio_cancel--取消异步请求
aio_cancel()函数允许用户取消对某个文件描述符执行的一个或所有 I/O 请求。其原型如下:
- int aio_cancel( int fd, struct aiocb *aiocbp );
如果要取消一个请求,用户需提供文件描述符和 aiocb 引用。如果这个请求被成功取消了,那么这个函数就会返回 AIO_CANCELED。如果请求完成了,这个函数就会返回AIO_NOTCANCELED。 如果要取消对某个给定文件描述符的所有请求,用户需要提供这个文件的描述符以及一个对 aiocbp 的 NULL 引用。如果所有的请求都取消了,这个函数就会返回AIO_CANCELED ;如果至少有一个请求没有被取消,那么这个函数就会返回AIO_NOT_CANCELED;如果没有一个请求可以被取消,那么这个函数就会返回AIO_ALLDONE。然后,可以使用 aio_error()来验证每个 AIO 请求,如果某请求已经被取消了,那么 aio_error()就会返回−1,并且 errno 会被设置为 ECANCELED。
lio_listio--同时发起多个传输(一次系统调用可以启动大量的I/O操作)
lio_listio()函数可用于同时发起多个传输。这个函数非常重要,它使得用户可以在一个系统调用(一次内核上下文切换)中启动大量的 I/O 操作。lio_listio API 函数的原型如下:
- int lio_listio( int mode, struct aiocb *list[], int nent, struct sigevent *sig );
mode 参数可以是 LIO_WAIT 或 LIO_NOWAIT。LIO_WAIT 会阻塞这个调用,直到所有的 I/O 都完成为止。在操作进行排队之后,LIO_NOWAIT 就会返回。list 是一个 aiocb 引用的列表,最大元素的个数是由 nent 定义的。如果 list 的元素为 NULL,lio_listio()会将其忽略。
3.2、使用信号作为AIO的通知
信号作为异步通知的机制在AIO中依然使用,为了使用信号,使用AIO的应用程序同样需要定义信号处理程序,在指定的信号被触发时,调用这个处理程序,作为信号上下文的一部分,特定的 aiocb 请求被提供给信号处理函数用来区分 AIO 请求。 下面代码清单给出了使用信号作为 AIO 异步 I/O 通知机制的例子。
- 1 /*设置异步 I/O 请求*/
- 2 void setup_io(...)
- 3 {
- 4 int fd;
- 5 struct sigaction sig_act;
- 6 struct aiocb my_aiocb;
- 7 ...
- 8 /* 设置信号处理函数 */
- 9 sigemptyset(&sig_act.sa_mask);
- 10 sig_act.sa_flags = SA_SIGINFO;
- 11 sig_act.sa_sigaction = aio_completion_handler;
- 12
- 13 /* 设置 AIO 请求 */
- 14 bzero((char*) &my_aiocb, sizeof(struct aiocb));
- 15 my_aiocb.aio_fildes = fd;
- 16 my_aiocb.aio_buf = malloc(BUF_SIZE + 1);
- 17 my_aiocb.aio_nbytes = BUF_SIZE;
- 18 my_aiocb.aio_offset = next_offset;
- 19
- 20 /* 连接 AIO 请求和信号处理函数 */
- 21 my_aiocb.aio_sigevent.sigev_notify = SIGEV_SIGNAL;
- 22 my_aiocb.aio_sigevent.sigev_signo = SIGIO;
- 23 my_aiocb.aio_sigevent.sigev_value.sival_ptr = &my_aiocb;
- 24
- 25 /* 将信号与信号处理函数绑定 */
- 26 ret = sigaction(SIGIO, &sig_act, NULL);
- 27 ...
- 28 ret = aio_read(&my_aiocb); /*发出异步读请求*/
- 29 }
- 30
- 31 /*信号处理函数*/
- 32 void aio_completion_handler(int signo, siginfo_t *info, void *context)
- 33 {
- 34 struct aiocb *req;
- 35
- 36 /* 确定是我们需要的信号*/
- 37 if (info->si_signo == SIGIO)
- 38 {
- 39 req = (struct aiocb*)info->si_value.sival_ptr; /*获得 aiocb*/
- 40
- 41 /* 请求的操作完成了吗? */
- 42 if (aio_error(req) == 0)
- 43 {
- 44 /* 请求的操作完成,获取返回值 */
- 45 ret = aio_return(req);
- 46 }
- 47 }
- 48 return ;
- 49 }
3.3 使用回调函数作为AIO的通知
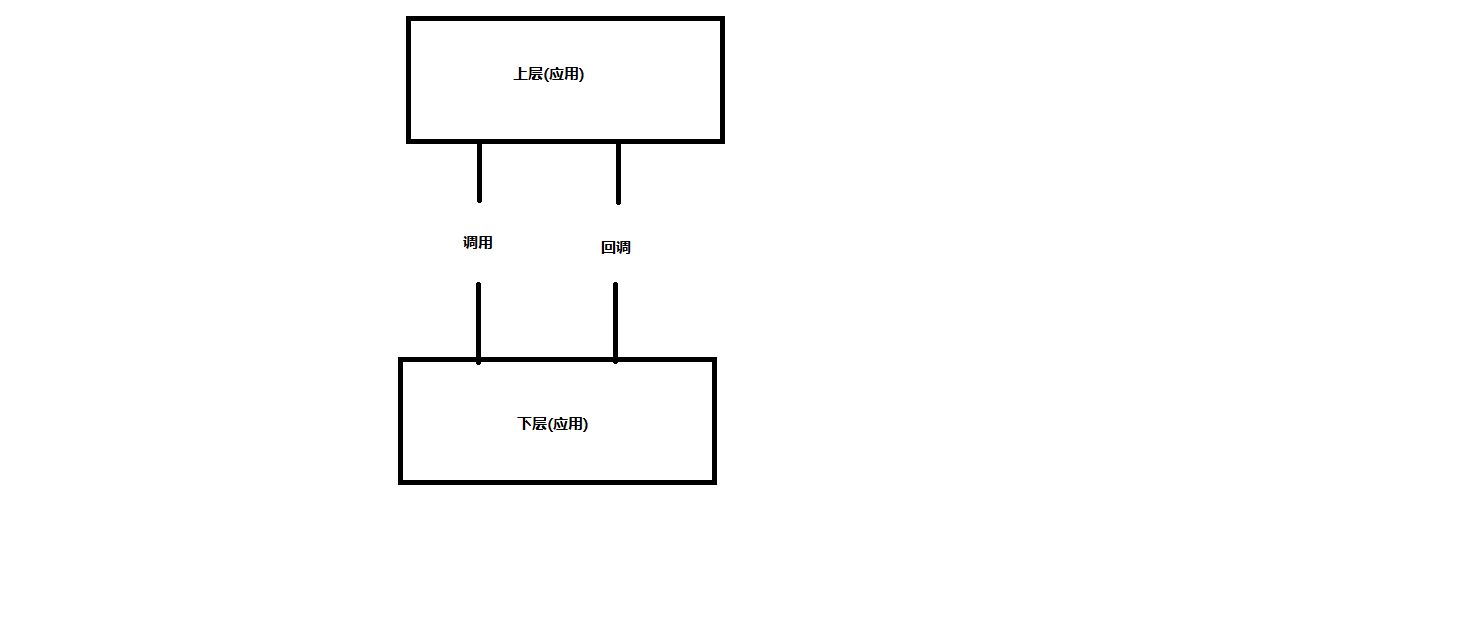
代码清单给出了使用回调函数作为 AIO 异步 I/O 请求完成的通知机制的例子
- 1 /*设置异步 I/O 请求*/
- 2 void setup_io(...)
- 3 {
- 4 int fd;
- 5 struct aiocb my_aiocb;
- 6 ...
- 7 /* 设置 AIO 请求 */
- 8 bzero((char*) &my_aiocb, sizeof(struct aiocb));
- 9 my_aiocb.aio_fildes = fd;
- 10 my_aiocb.aio_buf = malloc(BUF_SIZE + 1);
- 11 my_aiocb.aio_nbytes = BUF_SIZE;
- 12 my_aiocb.aio_offset = next_offset;
- 13
- 14 /* 连接 AIO 请求和线程回调函数 */
- 15 my_aiocb.aio_sigevent.sigev_notify = SIGEV_THREAD;
- 16 my_aiocb.aio_sigevent.notify_function = aio_completion_handler;
- 17 /*设置回调函数*/
- 18 my_aiocb.aio_sigevent.notify_attributes = NULL;
- 19 my_aiocb.aio_sigevent.sigev_value.sival_ptr = &my_aiocb;
- 20 ... ret = aio_read(&my_aiocb); //发起 AIO 请求
- 21 }
- 22
- 23 /* 异步 I/O 完成回调函数 */
- 24 void aio_completion_handler(sigval_t sigval)
- 25 {
- 26 struct aiocb *req;
- 27 req = (struct aiocb*)sigval.sival_ptr;
- 28
- 29 /* AIO 请求完成? */
- 30 if (aio_error(req) == 0)
- 31 {
- 32 /* 请求完成,获得返回值 */
- 33 ret = aio_return(req);
- 34 }
- 35
- 36 return ;
- 37 }
3.4 AIO与设备驱动
在内核中,每个I/O请求都对应一个kiocb结构体,其ki_filp成员只想对应的file指针,通过is_sync_kiocb判断某kiocb是否为同步I/O请求,如果是返回真,表示为异步I/O请求。
块设备和网络设备:本身是异步的
字符设备:必须明确应支持AIO(极少数是异步I/O操作)
字符设备驱动程序中file_operations 包含 3 个与 AIO 相关的成员函数,如下所示:
- ssize_t (*aio_read) (struct kiocb *iocb, char *buffer, size_t count, loff_t offset);
- ssize_t (*aio_write) (struct kiocb *iocb, const char *buffer, size_t count, loff_t offset);
- int (*aio_fsync) (struct kiocb *iocb, int datasync);
over~
版权所有,转载请注明转载地址:http://www.cnblogs.com/lihuidashen/p/4455393.html
蜕变成蝶~Linux设备驱动之异步通知和异步I/O的更多相关文章
- 蜕变成蝶~Linux设备驱动之CPU与内存和I/O
那是世上最远的距离 思念让我无法去呼吸 你的一动和一举 占据我心里 陪我每个孤独无尽的夜里 用我心中盛放的画笔 描绘你微笑时的绚丽 爱让人痛彻心底 我却不怀疑 你的存在是我生命的奇迹 感受你的每一次的 ...
- 蜕变成蝶~Linux设备驱动中的阻塞和非阻塞I/O
今天意外收到一个消息,真是惊呆我了,博客轩给我发了信息,说是俺的博客文章有特色可以出本书,,这简直让我受宠若惊,俺只是个大三的技术宅,写的博客也是自己所学的一些见解和在网上看到我一些博文以及帖子里综合 ...
- 蜕变成蝶~Linux设备驱动之按键设备驱动
在上述的驱动系列博客中,我们已经了解了关于阻塞和非阻塞.异步通知.轮询.内存和I/O口访问.并发控制等知识,按键设备驱动相对来说是比较简单的,本章内容可以加深我们对字符设备驱动架构.阻塞与非阻塞.中断 ...
- 蜕变成蝶~Linux设备驱动之字符设备驱动
一.linux系统将设备分为3类:字符设备.块设备.网络设备.使用驱动程序: 字符设备:是指只能一个字节一个字节读写的设备,不能随机读取设备内存中的某一数据,读取数据需要按照先后数据.字符设备是面向流 ...
- 蜕变成蝶~Linux设备驱动之DMA
如果不曾相逢 也许 心绪永远不会沉重 如果真的失之交臂 恐怕一生也不得轻松 一个眼神 便足以让心海 掠过飓风 在贫瘠的土地上 更深地懂得风景 一次远行 便足以憔悴了一颗 羸弱的心 每望一眼秋水微澜 便 ...
- 蜕变成蝶~Linux设备驱动之中断与定时器
“我叮咛你的 你说 不会遗忘 你告诉我的 我也全部珍藏 对于我们来说 记忆是飘不落的日子 永远不会发黄 相聚的时候 总是很短 期待的时候 总是很长 岁月的溪水边 捡拾起多少闪亮的诗行 如果你要想念我 ...
- 蜕变成蝶~Linux设备驱动之watchdog设备驱动
看门狗(watchdog )分硬件看门狗和软件看门狗.硬件看门狗是利用一个定时器 电路,其定时输出连接到电路的复位端,程序在一定时间范围内对定时器清零 (俗称 “喂狗”),如果程序出现故障,不在定时周 ...
- 蜕变成蝶~Linux设备驱动中的并发控制
并发和竞争发生在两类体系中: 对称多处理器(SMP)的多个CPU 内核可抢占的单CPU系统 访问共享资源的代码区域称为临界区(critical sections),临界区需要以某种互斥机制加以保护.在 ...
- linux设备驱动归纳总结(三):7.异步通知fasync【转】
本文转载自:http://blog.chinaunix.net/uid-25014876-id-62725.html linux设备驱动归纳总结(三):7.异步通知fasync xxxxxxxxxxx ...
随机推荐
- python正则表达式(二)
表示字符 示例1: . #coding=utf-8 import re ret = re.match(".","a") ret.group() ret = re ...
- TFS2017新特性(一)
自 Team Foundation Server 2015 中引入了基于集成式 Web 的 Release Management 以来,我们在此版本中进行了几处功能增强. 克隆.导出和导入发布定义 我 ...
- 使用itchat实现一个微信机器人聊天回复功能
近看到好多群里都有一个@机器人的功能,挺有趣的,想自己也玩下,就通过百度一点点实现,在这总结一下整个从无到有的过程. 首先,要知道itchat,它是Python写的,所以想要实现这个机器人的功能,需要 ...
- Oracle ORA-12541,ORA-12514错误
1.昨天发布tomcat 成功,但登录后报错,无法打开hibernate session,检查后发现数据库无法连接 2.用PL/SQL登录数据库,报 ora-12541,TNS 无监听程序,百度发现需 ...
- JS_高程5.引用类型(2)Array类型
Array类型: ECMAScript数组的每一项可以保存任何类型的数据,数组的大小是可以动态调整的. 创建数组的基本方式: (1)使用Array构造函数 var color=new Array(); ...
- java.lang.NumberFormatException: multiple points错误问题
最近项目一直会出现时间转换报错,一直不知道是什么问题??? java.lang.NumberFormatException: multiple points at sun.misc.Float ...
- 在.NET下如何预防XXE注入攻击
接下来关于.NET中XXE注入的内容来自Dean Fleming单元测试的Web站点:https://github.com/deanf1/dotnet-security-unit-tests.该站点覆 ...
- numexpr low version warning
runing https://colab.research.google.com/notebooks/mlcc/first_steps_with_tensor_flow.ipynb?hl=zh-cn# ...
- ionic 锁定方向 禁止横屏 orientation
安装插件 cordova-plugin-screen-orientation ionic cordova plugin add cordova-plugin-screen-orientation 添加 ...
- ionic中android的返回键
ionic中android的返回键 在ionic框架中已经注册了几个返回事件,分别是 view sideMenu modal actionSheet popup loading 他们的优先级分别是 v ...