A CANBus Tiny Network without Transceiver ICs : STM32F4 Discovery
Sometimes you have a CAN equipped processor on a low cost board but it has no CAN transceiver chips.
Here is a method that can be used to create a small experimental network with such a board.
There will be no noise immunity and you might have to lower the speed….
but many experimenters have made this work satisfactorily.
Use a signal diode similar to 1N914 or 1N4148.
Power supply diodes usually do not have a fast enough recovery time for CAN to function.
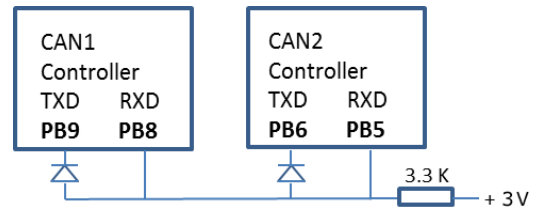
Modifying the STM32F4 Discovery:
In order to connect the two CAN controllers together, you must add two signal diodes (1N914, 1N4148 or similar)
and one 3.3 KΩ resistor as shown on this schematic.
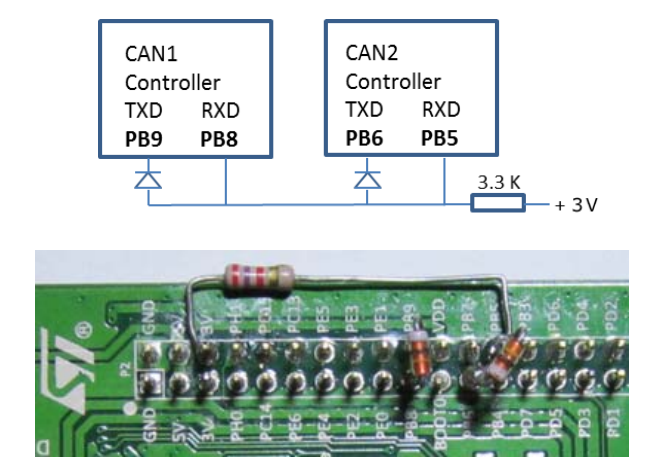
The connections are easily accessible.
1. Add the three parts as shown on the schematic and in the photo.
2. Connect the resistor to the 3 volt supply as shown.
3. Add a jumper wire (not shown) from PB5 to PB8.
4. Note: I used a 2.7KΩ resistor and it seems to work well.
5. I soldered the components to the board.
6. Note: you will need to open the resistor for a step later.
You cannot connect this to a real CAN network as the voltages are wrong and it is not differential.
It is suitable for small experiments.
TIP: To view CAN frames on an oscilloscope: connect to the low side of the resistor. This will give a clean waveform.
A CANBus Tiny Network without Transceiver ICs : STM32F4 Discovery的更多相关文章
- One-wire Demo on the STM32F4 Discovery Board
One-wire Demo on the STM32F4 Discovery Board Some of the devs at work were struggling to get their s ...
- VGA Output from STM32F4 Discovery board
VGA Output from STM32F4 Discovery board I love the web! There are so many cool projects out there, a ...
- CANBus Determining Network Baud Rate, Automatic bit-rate detection
http://www.canbushack.com/blog/index.php?title=determining-network-baud-rate Determining Network Bau ...
- STM32F4 SPI2初始化及收发数据【使用库函数】
我的STM32F4 Discovery上边有一个加速度传感器LIS302DL.在演示工程中,ST的工程师使用这个传感器做了个很令人羡慕的东西:解算开发板的姿态.当开发板倾斜时候,处于最上边的LED点亮 ...
- STM32F4 HAL Composite USB Device Example : CDC + MSC
STM32F4 USB Composite CDC + MSC I'm in the process of building a USB composite CDC + MSC device on t ...
- Troubleshooting routing topology based on a reference topology
In one embodiment, a computing device (e.g., border router or network management server) transmits a ...
- 搭建基于 STM32 和 rt-thread 的开发平台
我们需要平台 如果说,SharePoint 的价值之一在于提供了几乎开箱即用的 innovation 环境,那么,智能设备的开发平台也一样.不必每次都从头开始,所以需要固定的工作室和开发平台作为创新的 ...
- 【uTenux实验】写在开始实验之前
1.使用的uTenux内核代码:http://www.uloong.cc/cn/download/uTenux_V1.6.00r180.zip 2.uTenux的特性: 1.微内核 2.开放源码.完 ...
- STM32F40xxx 与 STM32F41xxx Flash结构详解
本文原创于http://www.cnblogs.com/humaoxiao,非法转载者请自重! 硬件平台:STM32F4 DISCOVERY开发板 型号:MB997A或MB997C主芯片型号:ST ...
随机推荐
- spring-boot-mybatis-多数据源
sql 语句 DROP TABLE IF EXISTS `users`; CREATE TABLE `users` ( `id` bigint(20) NOT NULL AUTO_INCREMENT ...
- CodeForces Contest #1114: Round #538 (Div. 2)
比赛传送门:CF #1114. 比赛记录:点我. 又 FST 了. [A]Got Any Grapes? 题意简述: 有三个人,第一个人需要吃绿色葡萄至少 \(a\) 个,第二个人需要吃绿色和紫色葡萄 ...
- 【干货】已Window7 系统为例,谈谈boot引导程序-------附带看看数据隐藏
来源:Unit 3: Unix/Linux File System 3.1 Unix/Linux File System Booting Process 使用工具:EnCase Forensic 学习 ...
- 内核早期内存分配器:memblock
内核早期内存分配器:memblockLinux内核使用伙伴系统管理内存,那么在伙伴系统工作前,如何管理内存?答案是memblock.memblock在系统启动阶段进行简单的内存管理,记录物理内存的使用 ...
- 001_软件waf
一.优秀的软件waf开源软件 <1>openwaf介绍 http://www.oschina.net/p/openwaf http://git.oschina.net/miracleqi ...
- Linux硬盘的检测(原创)
http://czmmiao.iteye.com/blog/1058215 概述 随着硬盘容量.速度的快速发展,硬盘的可靠性问题越来越重要,今天的单块硬盘存储容量可轻松达到1TB,硬盘损坏带来的影响非 ...
- [转]mysql性能优化-慢查询分析、优化索引和配置
一. 优化概述 MySQL数据库是常见的两个瓶颈是CPU和I/O的瓶颈,CPU在饱和的时候一般发生在数据装入内存或从磁盘上读取数据时候.磁盘I/O瓶颈发生在装入数据远大于内存容量的时候,如果应用分布在 ...
- kafka脚本
为了便于使用,kafka提供了比较强大的Tools,把经常需要使用的整理一下 开关kafka Server bin/kafka-server-start.sh config/server.proper ...
- java 多态缺陷
一,会覆盖私有方法 package object; class Derive extends Polymorphism{ public void f1() { System.out.println(& ...
- ***Bootstrap FileInput插件的使用经验汇总
插件下载地址: https://github.com/kartik-v/bootstrap-fileinput/ 官方DEMO查看: http://plugins.krajee.com/file-ba ...