TurtleBot3 Waffle (tx2版华夫)(10)自主导航(A2激光雷达)
1)[Remote PC] 启动roscore
$ roscore
2)[TurBot3] 启动turbot3
$ roslaunch turbot3_bringup minimal.launch
3)[TurBot3] 启动导航
$ roslaunch turbot3_navigation navigation_laser.launch map_file:=$HOME/map.yaml
4)[Remote PC] 启动Rviz
$ roslaunch turbot3_rviz navigation_rviz.launch
5)在开始导航之前,Turbot3应该知道它的位置和姿势
要给出初始数据,请按照说明进行操作
点击2D Pose Estimate按钮
通过单击并拖动地图上的方向来设置地图上的大致位置。
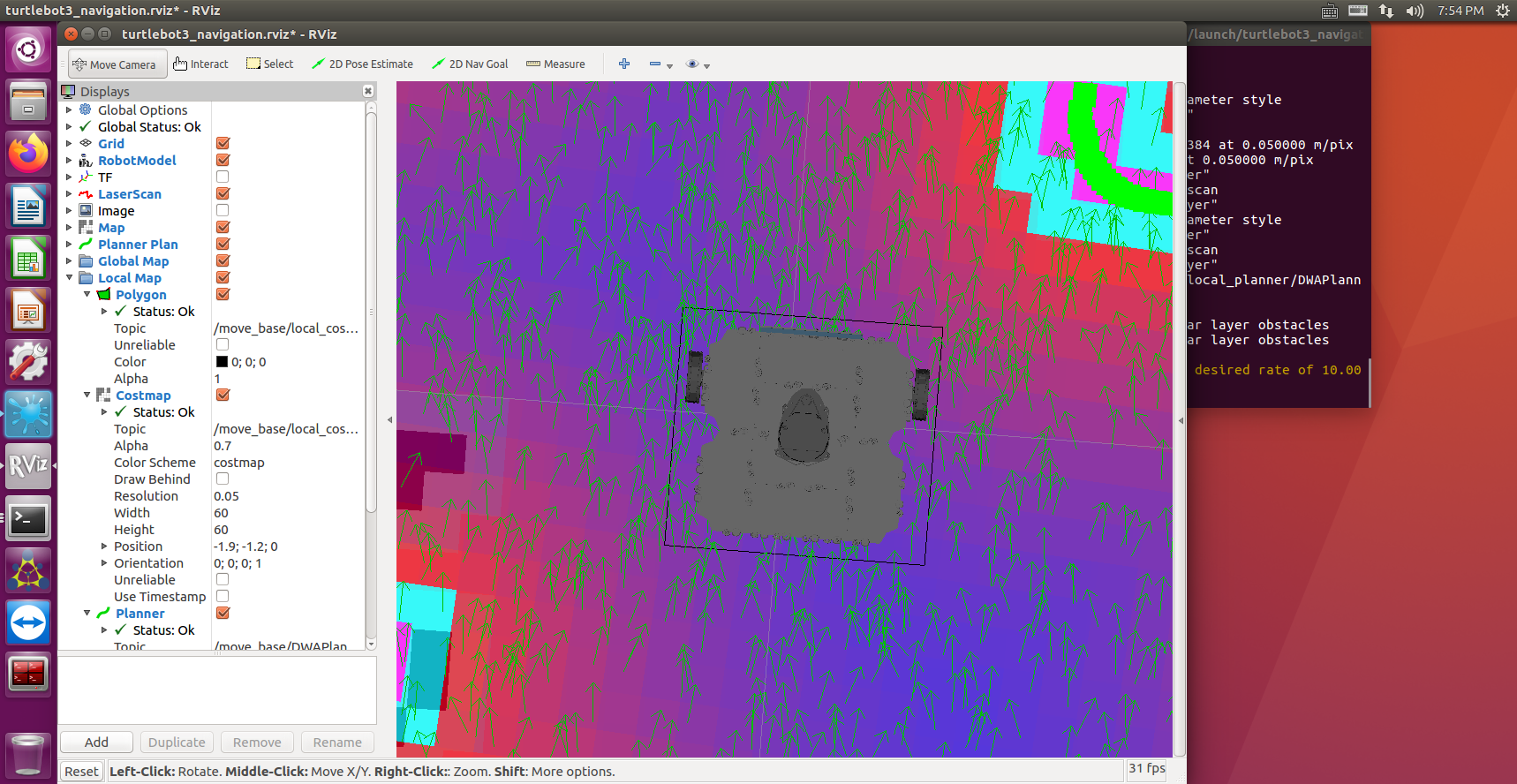
箭头的每个点意味着Turbot3的预期姿势。激光扫描仪将在近似位置绘制线条,如地图上的墙壁
如果图形没有显示线条,请重复上述过程

当Turbot3已经定位,它将自动计划路径
要发送目标位置:
点击 2D Nav Goal按钮
点击地图上你想要的TurtleBot驱动和拖动方向Turbot3应该指向地方
如果目标位置的路径被阻止,这可能会失败。
要在机器人到达目标位置之前停止机器人,请发送Turbot3的当前位
TurtleBot3 Waffle (tx2版华夫)(10)自主导航(A2激光雷达)的更多相关文章
- TurtleBot3 Waffle (tx2版华夫)(4)笔记本与TX2的通信
4.1. 使用vnc控制华夫Turbot3-Tx2开发板 1) 电脑端安装vnc viewer,您可以选择应用商城下载安装即可: 2) 下载后打开,键入Turbot3的ip à回车à选择连接: 3) ...
- TurtleBot3 Waffle (tx2版华夫)(9)建图-gmapping建图(A2雷达)
9.1. 说明 这一节我们来讲 Turtlebot3 的 SLAMSLAM(The Simultaneous Localization and Mapping) 同步定位与地图构建: 希望机器人从未知 ...
- TurtleBot3 Waffle (tx2版华夫)(2)系统安装
Tx2系统默认是安装好的,由于镜像文件大于20G,无法上传百度网盘,所以如有需要请联系我们客服:下面主要是操作步骤: 2.1.准备工作 a.准备好利用Jetpack刷过机的Ubuntu的主机(HOST ...
- TurtleBot3 Waffle (tx2版华夫)(13)RC100遥控杆控制
13.1.遥控器说明 使用ROBOTIS RC100的设置已经在ROS的OpenCR固件中,因此不需要安装必需软件包, 安装号即可使用. 13.2.遥控器的安装 1接线口穿过后壳的过孔. 2接线口连接 ...
- TurtleBot3 Waffle (tx2版华夫)(12)建图-hector建图
1)[Remote PC] 启动roscore $ roscore 2)[TurBot3] 启动turbot3 $ roslaunch turbot3_bringup minimal.launch 3 ...
- TurtleBot3 Waffle (tx2版华夫)(11)建图-karto建图
1)[Remote PC] 启动roscore $ roscore 2)[TurBot3] 启动turbot3 $ roslaunch turbot3_bringup minimal.launch 3 ...
- TurtleBot3 Waffle (tx2版华夫)(8)键盘控制
1)[Remote PC] 启动roscore $ roscore 2)[Turbot3] 启动turbot3 $ roslaunch turbot3_bringup minimal.launch 3 ...
- TurtleBot3 Waffle (tx2版华夫)(7)底盘测试
说明:opencr本身带有自测底盘功能,通过按opencr的sw1和sw2来自检底盘是否正确安装和运行: 7.1.前进测试 1)测试前,先把小车架空,轮子不要着地: 2)接好电源后,打开opencr的 ...
- TurtleBot3 Waffle (tx2版华夫)(6)
重要提示:请在配网通信成功后进行操作,配网后再次开机需要重新验证通信: 重要提示:[Remote PC]代表PC端.[TurtelBot]代表树莓派端: 操作步骤如下: 1)[Remote PC] 启 ...
随机推荐
- java并发编程实战《六》等待-通知机制
用"等待-通知"机制优化循环等待 前言 在破坏占用且等待条件的时候,如果转出账本和转入账本不满足同时在文件架上这个条件,就用死循环的方式来循环等待. 1 // 一次性申请转出账户和 ...
- 软工团队作业--Scrum冲刺集合贴
软工团队作业--Scrum冲刺集合贴 团队 团队名称:广东靓仔六强选手 团队成员: 黄清山 黄梓浩 钟俊豪 周立 邓富荣 郑焕 博客链接 Scrum 冲刺 第一篇 Scrum 冲刺 第二篇 Scrum ...
- 【题解】折纸 origami [SCOI2007] [P4468] [Bzoj1074]
[题解]折纸 origami [SCOI2007] [P4468] [Bzoj1074] 传送门:折纸 \(\text{origami [SCOI2007] [P4468]}\) \(\text{[B ...
- NOI 2020 D1T3 本人题解
我看了出题人本题的做法,感觉很难写,就自己胡了一个\(O((n + m) \sqrt n)\)的做法. 第一步我的想法与出题人一样,都是考虑容斥降维.对第\(i\)组询问,我们枚举两个事件中较大的一个 ...
- 题解-CF101D Castle
题面 CF101D Castle 给一棵 \(n\) 个节点的带权树,求一种遍历方案,从 \(1\) 出发,每条边走两次,走过所有点,第一次经过每个节点的平均时间最小.输出这个平均时间. 数据范围:\ ...
- AcWing 332. 股票交易
大型补档计划 题目链接 \(f[i][j]\) 表示前 \(i\) 天,手里有 \(j\) 个股票挣得最多钱 买股票.枚举 \(u < i - W\) \(f[i][j] = max(f[u][ ...
- 前端删除多条数据,如何将多个被删除项指定key传给后台
实际情景: 前端需要移除多个用户,这时需要根据每个用户id进行批量删除操作 前端操作: 1. 拿到所有被操作用户的信息存入数组, 例如 userlist = [user1, user2, user3] ...
- Ubuntu18 安装 MySQL 8.0.22
Ubuntu18 安装 MySQL 8.0.22 网上教程都比旧,也不是第一次安装了,但依然还是花了比较多的时间,特此记录本次安装过程.因是安装完毕后回忆记录,或有错漏. 第一步: 下载 mysql ...
- G1 收集器
基础知识 性能指标 在调优Java应用程序时,重点通常放在两个主要目标上:响应性 或 吞吐量. 响应性Responsiveness 是指应用程序对请求的数据做出响应的速度: 桌面用户界面对事件的响应速 ...
- 详解Java中的IO输入输出流!
目录 本片要点 基本分类 发展史 文件字符流 输出的基本结构 流中的异常处理 异常处理新方式 读取的基本结构 运用输入与输出完成复制效果 文件字节流 缓冲流 字符缓冲流 装饰设计模式 转换流(适配器) ...