OpenManipulator RM-X52 ROS 开源机械臂
DYNAMIXEL PRO PH54-200-S500-R 简介

![]()
此款机械臂可以直接装配到TurtleBot3 Waffle上使用,对于TurtleBot3 Burger需要对机器人底盘重新改装才能装配使用,相关事宜请咨询我司! OpenManipulator是一款基于ROS开源平台的机械臂,它的软件和硬件都是开源的,使用的是嵌入式控制板OpenCR(当然,用户可以使用自己的软件和控制器,只要符合robotis Dynamixel控制协议即可)。机械臂除了金属衔接件,其他骨架可3D打印。 本款机械臂是基于ROS的精简版; 由于采用了舵机XM-430系列舵机,使其具有了较高的有效载荷; PC或移动平台可使用,方便快速。同时可兼容产品,如TB3 WafflePi; 提供源代码和开发环境,帮助您迅速操作TB3 WafflePi; 您可以自由选择,使用PC或使用控制器。如控制器OpenCR;
可用于:开放源码软件、3D绘图、CAD数据等方向的研究
产品特点
低成本,高重复性,MAX有效载荷500g
带有反馈的精密伺服控制(DYNAMIXEL X系列)
模块化结构和多合一设计 易于与PC或嵌入式板一起使用
开源硬件(CAD)和软件(SDK)
重量轻,可与移动机器人平台集成

![]()
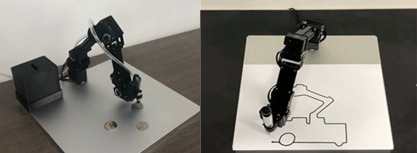
OpenManipulator RM-X52为开放式机械手,提供开源CAD,软件,硬件设计和公共资源进行开发

![]()
开发环境与链接方式

![]()
产品参数
电源 (单独出售) 12V
自由度 5 (4自由度 + 1自由度 Gripper)
负载 500g
RPM (关节) 46RPM
重量 (装配) 700g
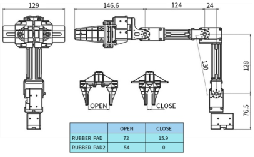
长度 380mm
夹持力 20~75mm
接口 TTL Level Multi Drop BUS
软件 ROS. DYNAMIXEL SDK, Arduino, Processing
控制器 (单独出售) PC, OpenCR
![]()

![]()
配置

![]()

![]()
开源硬件和开源软件
Open-source Hardware
CAD Date : OnShape(Search “ROBOTIS”)
Chain : https://goo.gl/NsqJMu
SCARA : https://goo.gl/oVsK8m
Link : https://goo.gl/MJ6C8K
Open-source Software
Firmware & ROS package : Github(Search “ROBOTIS-GIT”)
OpenManipulator : https://github.com/ROBOTIS-GIT/open_manipulator
OpenCR : https://github.com/ROBOTIS-GIT/OpenCR
![]()

![]()

![]()
可选搭配方案

![]()
OpenManipulator RM-X52 ROS 开源机械臂的更多相关文章
- Turtlebot3新手教程:Open-Manipulator机械臂
*本文针对如何结合turtlebot3和Open-Manipulator机械臂做出讲解 测试在Ubuntu 16.04, Linux Mint 18.1和ROS Kinetic Kame下进行 具体步 ...
- ROS连接ABB机械臂调试详细教程-ROS(indigo)和ABB RobotStudio 6.03.02-
在ROS industrial介绍中,给出了ROS和常用机械臂的连接方式.具体信息可以参考:http://wiki.ros.org/Industrial ROS连接ABB机械臂调试详细教程-ROS(i ...
- ROS机械臂 Movelt 学习笔记1 | 基础准备
环境:Ubuntu18.04 + ROS Melodic 1. 安装ROS 官网下载安装步骤:http://wiki.ros.org/melodic/Installation/Ubuntu 一键安装的 ...
- ROS机械臂 Movelt 学习笔记2 | Move Group 接口 C++
Movelt为使用者提供了一个最通用且简单的接口 MoveGroupInterface 类,这个接口提供了很多控制机器人的常用基本操作,如: 设置机械臂的位姿 进行运动规划 移动机器人本体 将物品添加 ...
- ROS机械臂 Movelt 学习笔记3 | kinect360相机(v1)相关配置
目标是做一个机械臂视觉抓取的demo,在基地里翻箱倒柜,没有找到学长所说的 d435,倒是找到了一个老古董 kinect 360. 前几天就已经在旧电脑上配置好了,现在记录在新电脑上的配置过程. 1. ...
- ROS机械臂 Movelt 学习笔记5 | MoveIt Commander Scripting
前一讲python接口中提到moveit_commander 包.这个包提供了用于运动规划.笛卡尔路径计算以及拾取和放置的接口. moveit_commander 包还包括一个命令行接口程序movei ...
- 配置 jaco机械臂 ros环境
---恢复内容开始--- 终于有机械臂了, 首先先下载包 cd ~/catkin_ws/src git clone https://github.com/Kinovarobotics/kinova-r ...
- ROS机械臂 Movelt 学习笔记4 | Move Group 接口 Python
Python 的使用总是比 C++ 简单许多,Move Group 的 Python 接口更为便捷,也为使用者提供了很多用于操纵机器人和机械臂的函数,能够和 C++ 接口实现相同的功能: 设置机械臂的 ...
- TurtleBot 3 & 2i ROS开源实验平台
TurtleBot 3 & 2i ROS开源实验平台,全球更受欢迎的ROS平台. TurtleBot是ROS标准平台机器人,在全球开发人员和学生中深受欢迎.其有3个版本: TurtleBot1 ...
随机推荐
- 手写koa-static源码,深入理解静态服务器原理
这篇文章继续前面的Koa源码系列,这个系列已经有两篇文章了: 第一篇讲解了Koa的核心架构和源码:手写Koa.js源码 第二篇讲解了@koa/router的架构和源码:手写@koa/router源码 ...
- 建立SQL Server用户登录
第一步:右击服务器名,点击"属性",选择"安全性",选中"Sql server和Windows身份验证模式". 第二步:鼠标右键点击安全性中 ...
- .net core 注入的几种方式
一.注册的几种类型: services.TryAddSingleton<IHttpContextAccessor, HttpContextAccessor>();//单利模式,整个应用程序 ...
- 响应式网站css reset
响应式网站 css reset /* core.css v1.1 | MIT License | corecss.io */ html { font-family: sans-serif; font- ...
- 【题解】CIRU - The area of the union of circles [SP8073] \ 圆的面积并 [Bzoj2178]
[题解]CIRU - The area of the union of circles [SP8073] \ 圆的面积并 [Bzoj2178] 传送门: \(\text{CIRU - The area ...
- AT2688 [ARC080C] Young Maids
一道挺有意思的题目,在这里记录一下. 题目大意 给你一个长度为 \(n\) 的排列,每一次你可以取出相邻的两个数将其放在答案序列的开头,最后问你字典序最小的答案序列是什么. 题解 由于最后是求字典序最 ...
- 题解-CF1444C Team-Building
题面 CF1444C Team-Building 给 \(n\) 个点 \(m\) 条边,每个点有颜色 \(c_i(1\le c_i\le k)\),求有多少个颜色对两组点并后是二分图. 数据范围:\ ...
- AcWing 316 .减操作
题目链接 大型补档计划 没想出来去看题解了... 关键是发现无论怎样括号嵌套,每个元素始终只有对答案的贡献为 + a[i] 或者 - a[i]. 而且第一个必然贡献是 +1, 第二个必然是 -1. 所 ...
- 九、git学习之——git基本命令全总结
初始化一个Git仓库,使用git init命令. 添加文件到Git仓库,分两步: git add <file>,注意,可反复多次使用,添加多个文件: 使用命令git commit,完成. ...
- 主从复制直接转换MGR_5.7验证试验
环境信息 IP port role info 192.168.188.51 4000 node1 master 192.168.188.52 4000 node2 slave1 192.168.188 ...