玩转X-CTR100 l STM32F4 l 舵机控制

我造轮子,你造车,创客一起造起来!塔克创新资讯【塔克社区 www.xtark.cn 】【塔克博客 www.cnblogs.com/xtark/ 】
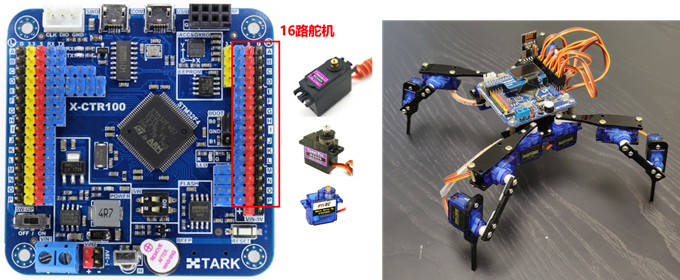
本文介绍X-CTR100控制器的舵机控制,X-CTR100具有16路舵机控制接口,通过定时器产生PWM控制信号,可用于航模、机械臂、机器人等制作。
原理
舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。目前,在高档遥控玩具,如飞机、潜艇模型,遥控机器人中已经得到了普遍应用。
舵机的形状和大小多到让人眼花缭乱,但大致可以如图C所示分类。最右边身材不错的是常见的标准舵机,中间两个小不点是体积最小的微型舵机,左边的魁梧的那个是体积最大的大扭力舵机。它们都是同样的三线控制,因此你可以根据需求换个大个的或小个的。
除了大小和重量,舵机还有两个主要的性能指标:扭力和转速,这两个指标由齿轮组和电机所决定。扭力,通俗讲就是舵机有多大的劲儿。在5V的电压下,标准舵机的扭力是5.5千克/厘米(75盎司/英寸),转速很容易理解,就是指从一个位置转到另一个位置要多长时间。在5V电压下,舵机标准转度是0.2秒移动60度。总之,和我们人一样,舵机的个子越大,转的就越慢但也越有劲儿。
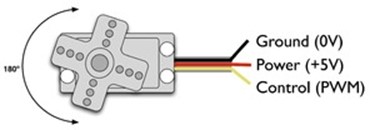
舵机有一个三线的接口。黑色(或棕色)的线是接地线,红线接+5V电压,黄线(或是白色或橙色)接控制信号端。
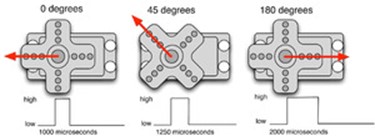
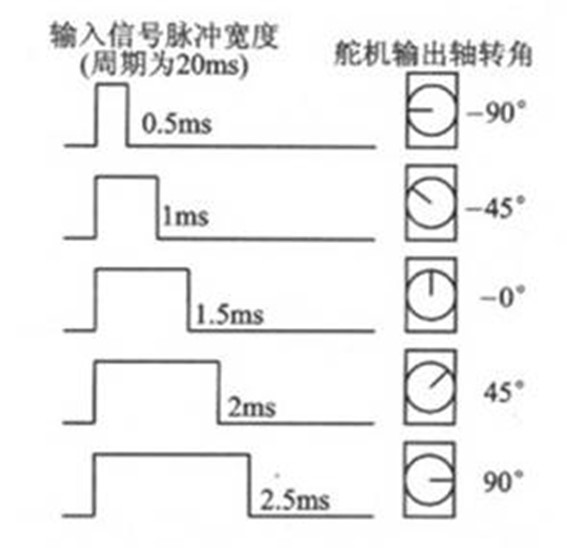
舵机的控制信号周期为20ms的脉宽调制(PWM)信号,其中脉冲宽度从0.5-2.5ms,相对应的舵盘位置为0-180度,呈线性变化。即提供一定的脉宽,它的输出轴就会保持一定对应角度上,无论外界转矩怎么改变,直到给它提供一个另外宽度的脉冲信号,它才会改变输出角度到新的对应位置。舵机控制脉冲宽度与转角关系如下图。
例程
控制16路舵机30度、90度、150度间隔运动。。
硬件说明
硬件资源:
- 串口UART1
- R扩展接口(16个扩展接口都可以接舵机)
- 舵机若干(需自备)
硬件连接:
软件生态
X-SOFT软件生态,X-API扩展文件如下。
ax_servo.c——X-CTR100 舵机控制源文件
ax_servo.h——X-CTR100 舵机控制头文件
接口函数
|
void AX_SERVO_TIM2_AB_Init(void); //舵机AB接口初始化 void AX_SERVO_TIM2_A_SetAngle(uint16_t angle); //舵机A控制 void AX_SERVO_TIM2_B_SetAngle(uint16_t angle); //舵机B控制
void AX_SERVO_TIM5_CD_Init(void); //舵机CD接口初始化 void AX_SERVO_TIM5_C_SetAngle(uint16_t angle); //舵机C控制 void AX_SERVO_TIM5_D_SetAngle(uint16_t angle); //舵机D控制
void AX_SERVO_TIM3_EFGH_Init(void); //舵机EFGH接口初始化 void AX_SERVO_TIM3_E_SetAngle(uint16_t angle); //舵机E控制 void AX_SERVO_TIM3_F_SetAngle(uint16_t angle); //舵机F控制 void AX_SERVO_TIM3_G_SetAngle(uint16_t angle); //舵机G控制 void AX_SERVO_TIM3_H_SetAngle(uint16_t angle); //舵机H控制
void AX_SERVO_TIM4_IJKL_Init(void); //舵机IJKL接口初始化 void AX_SERVO_TIM4_I_SetAngle(uint16_t angle); //舵机I控制 void AX_SERVO_TIM4_J_SetAngle(uint16_t angle); //舵机J控制 void AX_SERVO_TIM4_K_SetAngle(uint16_t angle); //舵机K控制 void AX_SERVO_TIM4_L_SetAngle(uint16_t angle); //舵机L控制
void AX_SERVO_TIM1_MNOP_Init(void); //舵机MNOP接口初始化 void AX_SERVO_TIM1_M_SetAngle(uint16_t angle); //舵机M控制 void AX_SERVO_TIM1_N_SetAngle(uint16_t angle); //舵机N控制 void AX_SERVO_TIM1_O_SetAngle(uint16_t angle); //舵机O控制 void AX_SERVO_TIM1_P_SetAngle(uint16_t angle); //舵机P控制 |
软件说明
函数AX_SERVO_TIMX_XX_Init()完成舵机控制定时器和IO的初始化,TIMX为对应的定时器,XX为初始化所包含的舵机接口,例如AX_SERVO_TIM3_EFGH_Init()初始化定时器TIM3,包含的接口为EFGH。while循环中通过AX_SERVO_TIMX_X_SetAngle()设置舵机的旋转角度,实现16路舵机30°、90°、150°间隔运动。主程序代码如下。
|
int main(void) { //X-CTR100初始化 AX_Init(115200); printf("***X-CTR100 舵机控制例程***\r\n\r\n");
//模块初始化及配置 AX_SERVO_TIM2_AB_Init(); AX_SERVO_TIM5_CD_Init(); AX_SERVO_TIM3_EFGH_Init(); AX_SERVO_TIM4_IJKL_Init(); AX_SERVO_TIM1_MNOP_Init();
//X-API测试:16路舵机控制测试 printf("*16路舵机控制测试\r\n");
while (1) { printf("*30度...... \r\n"); AX_SERVO_TIM2_A_SetAngle(300); AX_SERVO_TIM2_B_SetAngle(300); AX_SERVO_TIM5_C_SetAngle(300); AX_SERVO_TIM5_D_SetAngle(300); AX_SERVO_TIM3_E_SetAngle(300); AX_SERVO_TIM3_F_SetAngle(300); AX_SERVO_TIM3_G_SetAngle(300); AX_SERVO_TIM3_H_SetAngle(300); AX_SERVO_TIM4_I_SetAngle(300); AX_SERVO_TIM4_J_SetAngle(300); AX_SERVO_TIM4_K_SetAngle(300); AX_SERVO_TIM4_L_SetAngle(300); AX_SERVO_TIM1_M_SetAngle(300); AX_SERVO_TIM1_N_SetAngle(300); AX_SERVO_TIM1_O_SetAngle(300); AX_SERVO_TIM1_P_SetAngle(300); AX_Delayms(1000);
printf("*90度...... \r\n"); AX_SERVO_TIM2_A_SetAngle(900); AX_SERVO_TIM2_B_SetAngle(900); AX_SERVO_TIM5_C_SetAngle(900); AX_SERVO_TIM5_D_SetAngle(900); AX_SERVO_TIM3_E_SetAngle(900); AX_SERVO_TIM3_F_SetAngle(900); AX_SERVO_TIM3_G_SetAngle(900); AX_SERVO_TIM3_H_SetAngle(900); AX_SERVO_TIM4_I_SetAngle(900); AX_SERVO_TIM4_J_SetAngle(900); AX_SERVO_TIM4_K_SetAngle(900); AX_SERVO_TIM4_L_SetAngle(900); AX_SERVO_TIM1_M_SetAngle(900); AX_SERVO_TIM1_N_SetAngle(900); AX_SERVO_TIM1_O_SetAngle(900); AX_SERVO_TIM1_P_SetAngle(900); AX_Delayms(1000);
printf("*150度...... \r\n"); AX_SERVO_TIM2_A_SetAngle(1500); AX_SERVO_TIM2_B_SetAngle(1500); AX_SERVO_TIM5_C_SetAngle(1500); AX_SERVO_TIM5_D_SetAngle(1500); AX_SERVO_TIM3_E_SetAngle(1500); AX_SERVO_TIM3_F_SetAngle(1500); AX_SERVO_TIM3_G_SetAngle(1500); AX_SERVO_TIM3_H_SetAngle(1500); AX_SERVO_TIM4_I_SetAngle(1500); AX_SERVO_TIM4_J_SetAngle(1500); AX_SERVO_TIM4_K_SetAngle(1500); AX_SERVO_TIM4_L_SetAngle(1500); AX_SERVO_TIM1_M_SetAngle(1500); AX_SERVO_TIM1_N_SetAngle(1500); AX_SERVO_TIM1_O_SetAngle(1500); AX_SERVO_TIM1_P_SetAngle(1500); AX_Delayms(1000); } } |
实现效果
可在16路舵机接口中任意一路插入舵机,舵机即可循环30°、90°、150°运动,接口顺序如下图,使用时注意电源供电能力及舵机的功率,一般电脑USB供电(500mA)可为1路GS90舵机提供电源,如果插入多路舵机,或舵机负载扭矩大,也可通过VIN-5V接口供电。

参考
https://m.guokr.com/article/5292/#weixin.qq.com
玩转X-CTR100 l STM32F4 l 舵机控制的更多相关文章
- 玩转X-CTR100 l STM32F4 l 定时器时间测量
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器 使用处理器内部硬件定 ...
- 玩转X-CTR100 l STM32F4 l ADC 模拟数字转换
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器 AD转换接 ...
- 玩转X-CTR100 l STM32F4 l MPU6050加速度陀螺仪传感器
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器 板载加速度 ...
- 玩转X-CTR100 l STM32F4 l X-CTR100与树莓派搭建机器人平台
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器与树莓派Linux系统 ...
- 玩转X-CTR100 l STM32F4 l DRV8825 A4988 步进电机控制
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器控制步进电机 ...
- 玩转X-CTR100 l STM32F4 l 基础例程printf、LED、蜂鸣器、拨码开关、位带操作
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器基础板载资源 ...
- 玩转X-CTR100 l STM32F4 l PS2无线手柄
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] SONY的PS2无线手柄是索尼游戏机的遥控手柄,控制 ...
- 玩转X-CTR100 l STM32F4 l DSP指令集性能测试
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器 DSP库的 ...
- 玩转X-CTR100 l STM32F4 l FPU单精度浮点性能测试
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器如何开启ST ...
随机推荐
- hdu4528 小明系列故事——捉迷藏(记录状态的BFS)题解
思路: 一道BFS题,和以前的BFS有点不同,这里的vis数组需要记录每次走时的状态,所以开了3维,只对该状态下的vis修改. 注意坑点:S的位置是可以走的 代码: #include<queue ...
- 51NOD 1087 1 10 100 1000
http://www.51nod.com/onlineJudge/questionCode.html#!problemId=1087 暴力大法 #include<bits/stdc++.h> ...
- js文字转移效果
这个例子算是有点样子的. 思路: 字符串操作.左框里面先是预设的.点击按钮时截取左框中的字符串的前一个字符到右框里的字符串后面,以此循环.点击按钮时按钮变为灰色,在循环完成后恢复.计数的总数(右边)是 ...
- python 深拷贝
from copy import deepcopy #create a tuple tuplex = (, [], True) print(tuplex) #make a copy of a tupl ...
- Window系统下用Ant实现Java项目的自动构建和部署
https://blog.csdn.net/xinxin19881112/article/details/7297021 Step 1: 从官网下载Ant包,官网地址http://ant.apache ...
- Kali Linux 2016.2初体验
前言 Kali Linux官 方于8月30日发布Kali Linux 2016的第二个版本Kali Linux 2016.2.该版本距离Kali Linux 2016.1版本发布,已经有7个月.在这期 ...
- vector_01
尾部 ==> 添加/删除 快 头部/中间 ==> 添加/删除 慢 A.尾部 添加/移除: void vector::push_back(); void vector::pop_back( ...
- c++ primer plus 第六章 课后题答案
#include <iostream> #include <cctype> using namespace std; int main() { char in_put; do ...
- Android 获取本地外网IP、内网IP、计算机名等信息
一.获取本地外网IP public static String GetNetIp() { URL infoUrl = null; InputStream inStream = null; try { ...
- Java之美[从菜鸟到高手演变]系列之博文阅读导航
随着博文越来越多,为博客添加一个导航很有必要!本博客将相继开通Java.CloudFoundry.Linux.Ruby等专栏,都会设立目录,希望读者朋友们能更加方便的阅读! 在阅读的过程中有任何问题, ...