ROS安装与卸载
1 版本选择
ROS 虽说也叫操作系统,但它是寄生在 LINUX 操作系统之下的,所以要求大兄弟你的电脑里至少要先有一个 LINUX 操作系统。
而对 ROS 兼容性最好的当属 Ubuntu 操作系统了,所以大兄弟,嘿嘿嘿,你自己看着办!
首先有一点需要说明,ROS是用来干“大事业”的,所以不推荐也不认同更不接受大家使用虚拟机。之前博主抱着玩一玩ROS的态度,在虚拟机里装了Ubuntu, 然后装ROS,结果,结果,结果被ROS给玩了...
1.1 Ubuntu 和 ROS 版本对应
即便是大兄弟用了Ubuntu,也是不能随便找一个版本的ROS装滴...
为啥呢,因为 Ubuntu 和 ROS 都是存在不同的版本滴,而且ROS各个版本之间还很接地气的(谁说的,打死他)互不兼容,所以每一个 ROS 版本都对应着一个或两个对应的 Ubuntu 版本。
具体咋对应的?请看:
| ROS发布日期 | ROS版本 | 对应Ubutnu版本 |
| 2016.3 |
ROS Kinetic Kame |
Ubuntu 16.04 (Xenial) / Ubuntu 15.10 (Wily) |
| 2015.3 |
ROS Jade Turtle |
Ubuntu 15.04 (Wily) / Ubuntu LTS 14.04 (Trusty) |
| 2014.7 |
ROS Indigo Igloo |
Ubuntu 14.04 (Trusty) |
| 2013.9 |
ROS Hydro Medusa |
Ubuntu 12.04 LTS (Precise) |
| 2012.12 |
ROS Groovy Galapagos |
Ubuntu 12.04 (Precise) |
| ... | ... | ... |
所以大兄弟,看到了吧,如果系统版本和ROS版本不对应,那是万万装不上滴。。。博主此处已嫩牛满面。。。
1.2 博主的配置
据博主的不完全统计(压根就没统计)的数据显示,现在学ROS的兄弟们普遍安装的是 Indigo 和 Hydro 版本, 但是现在已经时2016年啦,新的一年就要有新气象,所以,博主就能别人所不能(呵呵),安装了Kinetic。
具体配置如下:
华硕笔记本 + Windows 10 + Ubuntu 16.04 双系统
- Ubuntu 硬盘大小: 100G
- 内存: 8G
- 显卡: 也不是用来打dota, 所以随便啦啦啦~\(≧▽≦)/~啦啦啦
Ros版本:ROS Kinetic Kame
博主分别用过 Indigo 和 Kinetic,其实在使用过程中差距并不大,除了极少数第三方库,只支持 Indigo版本,毕竟 Kinetic 刚刚发布,存在一些第三方库还没有及时跟进啦。。。
2 开始安装
既然选定好版本,我们就开始安装啦!
前提还是大兄弟已经自己安装好了 Ubuntu 16.04 哦!如果是 Ubuntu 14.04,只需要把下面所有出现 *-kinetic-* 的地方换成 *-indigo-* 就好了。
2.1 软件中心配置
首先打开软件和更新对话框,具体可以在 Ubuntu 最左上角的搜索按钮中搜索。
打开后按照下图进行配置(确保你的"restricted", "universe," 和 "multiverse."前是打上勾的):
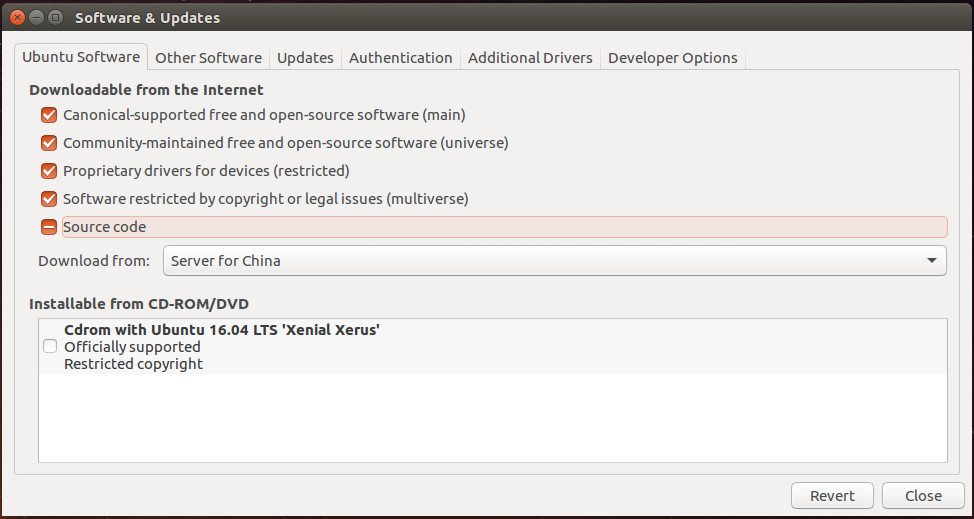
配置完成后就可以关闭该窗口了。
2.2 添加源
打开一个控制台(Ctrl + Alt + T), 输入如下指令:
$ sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
设置秘钥:
$ sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 0xB01FA116
2.3 安装 ROS
首先确保系统软件处于最新版
$ sudo apt-get update
然后我们就可以安装 ROS 啦,但是问题又出现了,ROS kinetic 也有很多版本,比如工业版,基础版,高级版,豪华版,至尊豪华...
既然我们想要学习ROS,那就安装至尊豪华全功能版吧,指令如下:
$ sudo apt-get install ros-indigo-desktop-full
好,打完指令,就可以整瓶啤酒,撸个烤串,看看电视消遣消遣,坐等ROS安装完成。
如果大兄弟家的网够快的话,没准分分钟就完事儿了。。。
...3...
...2...
...1...
倒数三个数,好,现在就当大兄弟安装完了,而且一切顺利,没有小虫子(BUG)粗现...
安装完成后,可以用下面的命令来查看可使用的包:
$ apt-cache search ros-indigo
到现在,虽然是安装完了,但是还不能用ROS哦,大兄弟别着急,心急吃不到豆腐...哦,是吃不到热豆腐...
2.4 初始化ROS
首先呢,需要先初始化 rosdep,嗯?这是啥?这不就是那个啥嘛,对吧,哈哈哈。。。⊙﹏⊙b汗
具体如下:
$ sudo rosdep init
$ rosdep update
然后初始化环境变量:
$ echo "source /opt/ros/indigo/setup.bash" >> ~/.bashrc
$ source ~/.bashrc
上面两句非常非常非常重要,很多小伙伴在日常的开发过程中,有的找不到 Package, 找不到node, 很多情况下都是没有添加source, 这里展开说就有点跑偏了,如果小伙伴们遇到问题,可以在留言中提出来...
最后呢,对,这是最后的最后了,安装一个非常常用的插件:
$ sudo apt-get install python-rosinstall
好,到这里,所有安装就都完事啦。。哈哈哈。。为了保险,重启一下,测试测试我们的ROS吧....
对了,这里要提醒一下,ros中很多的第三方插件的安装格式是:
$ sudo apt-get install ros-indigo-...
例如:
$ sudo apt-get install ros-indigo-turtlebot*
3 创建工作空间
mkdir -p ~/catkin_ws/src
cd ..
catkin_make
cd
echo "source /opt/ros/indigo/setup.bash" >> ~/.bashrc
echo "source /home/<your dir>/catkin_ws/devel/setup.bash" >> ~/.bashrc
4 测试ROS
安装完了好歹要测试一下吧,不然怎么对的起那瓶啤酒啊...大兄弟,你还清醒吗...
首先,启动ROS环境
$ roscore
看看显示 started core service [/rosout] 了没有?如果没问题,恭喜大兄弟,你成功了。
什么?出问题了?那好吧,估计是啤酒喝多了,再从头来一遍吧,这次就别喝了。。。
这里链接一下我总结的ROS指令字典,大兄弟今后想查什么指令,直接看这个就好了
http://www.cnblogs.com/liu-fa/p/5761448.html
5 ROS卸载
sudo apt-get remove ros-*
ROS安装与卸载的更多相关文章
- ROS的安装和卸载
Robot Operating System (ROS) 是一个得到广泛应用机器人系统的软件框架,它包含了一系列的软件库和工具用于构建机器人应用.从驱动到最先进的算法,以及强大的开发者工具,ROS 包 ...
- ROS系统的安装以及卸载
ROS系统的安装 ROS系统的安装方式有两种,通过软件源和源码编译安装.软件源安装只需要通过简单的命令,因此,我们使用软件源来安装ROS 配置系统软件源 打开Ubuntu软件中心的软件源配置界面,勾选 ...
- ROS入门笔记(二):ROS安装与环境配置及卸载(重点)
ROS入门笔记(二):ROS安装与环境配置及卸载(重点) [TOC] 1 ROS安装步骤 1.1 ROS版本 ROS目前只支持在Linux系统上安装部署, 它的首选开发平台是Ubuntu. 发布时间 ...
- ROS学习笔记一:ROS安装与测试
1 Ubuntu和ROS版本的对应关系 Ubuntu 和 ROS 都存在不同的版本,其对应关系如下: 注:如果Ubuntu版本和ROS版本不对应的话,安装就不会成功了- 笔者安装的是Ubuntu14. ...
- C#创建、安装、卸载、调试Windows Service(Windows 服务)的简单教程
前言:Microsoft Windows 服务能够创建在它们自己的 Windows 会话中可长时间运行的可执行应用程序.这些服务可以在计算机启动时自动启动,可以暂停和重新启动而且不显示任何用户界面.这 ...
- 教你一招:解决win10/win8.1系统在安装、卸载软件时出现2502、2503错误代码的问题
经常遇到win10/win8.1系统在安装.卸载软件时出现2502.2503错误代码的问题. 解决办法: 1.打开任务管理器后,切换到“详细信息”选项卡,找到explore.exe这个进程,然后结束进 ...
- Android随笔之——静默安装、卸载
随笔之所以叫随笔,就是太随意了,说起来,之前的闹钟系列随笔还没写完,争取在十月结束之前找时间把它给写了吧.今天要讲的Android APK的静默安装.卸载.网上关于静默卸载的教程有很多,更有说要调用隐 ...
- Windows服务安装与卸载
Windows服务安装与卸载,使用到了InstallUtil.exe 安装: c: cd "C:\Windows\Microsoft.NET\Framework\v4.0.30319&quo ...
- Windows服务一:新建Windows服务、安装、卸载服务
Windows 服务(即,以前的 NT 服务)使您能够创建在它们自己的 Windows 会话中可长时间运行的可执行应用程序.这些服务可以在计算机启动时自动启动,可以暂停和重新启动而且不显示任何用户界面 ...
随机推荐
- php语言基础语法与编程工具推荐
php脚本语言,需要在服务器端执行,用浏览器返回HTML结果.在PHP中所有的语法都是如此,用户端是无法修改的,只有浏览权限. 一.php基础语法之输出方法 1.PHP中所有的脚本,可以放在文件中的任 ...
- Android 安装 卸载 更新 程序
安装程序的方法: .通过Intent机制,调出系统安装应用,重新安装应用的话,会保留原应用的数据. 1. String fileName =Environment.getExternalStorage ...
- bash执行命令分别输出正常日志和错误日志
0. 说明 执行bash命令的定时任务时候,希望能把正常的日志输出到一个文件里面,同时如果执行的过程发生异常则把异常日志输出到另一个不同的文件中.方便今后异常排查,极大有利于快速定位出错位置. 需要了 ...
- pacman安装软件包出现损坏
状况 File .pkg.tar.xz is corrupted (invalid or corrupted package (PGP signature)).Do you want to delet ...
- 【洛谷P4113】采花 HH的项链+
题目大意:静态统计序列区间中出现次数大于等于 2 的颜色数. 题解:类似于HH的项链,只需将 i 和 pre[i] 的关系对应到 pre[i] 和 pre[pre[i]] 的关系即可. 代码如下 #i ...
- 淘宝助理导出的csv文件使用的是什么编码,您猜?
今天下午用Java读取从淘宝助理 V4.3 Beta1导出的csv文件,出现中文乱码情况. 一看就是文件编码引起的,不清楚淘宝助理导出的csv文件使用了什么编码,到百度搜索了一下,看到一些相关文章,但 ...
- hashlib模块(二十八)
# 1.什么叫hash:hash是一种算法(3.x里代替了md5模块和sha模块,主要提供 SHA1, SHA224, SHA256, SHA384, SHA512 ,MD5 算法),该算法接受传入的 ...
- java常用的运算符
Java 语言中常用的运算符可分为如下几种: Ø 算术运算符 Ø 赋值运算符 Ø 比较运算符 Ø 逻辑运算符 Ø 条件运算符
- pymysql 在数据库中插入空值
1. 先搞清 ''(空字符串)和 NULL的区别 (1)本质区别: 空字符串是个值 NULL 和Python中的NULL一样,是空值的意思 (2)查询语句的区别: SELECT * FROM test ...
- 超级牛皮的oracle的分析函数over(Partition by...) 及开窗函数
over(Partition by...) 一个超级牛皮的ORACLE特有函数. 天天都用ORACLE,用了快2年了.最近才接触到这个功能强大而灵活的函数.真实惭愧啊! oracle的分析函数over ...