特征点方法 - Harris和SURF的手工实现
整理去年做的小项目,纪念我的图像处理入门。
因为要在DSP上实现,所以完全手工C代码垒起来的,还要保证和PC端跑的结果一样,觉得可能特殊场景会有用,上传github,没有依赖任何库;
格式注释什么的暂时没有整理,没有优化,能用,但是可能不够快,也没有考虑内存开销的优化,直接就在DDR2/SRAM上跑的。
Harris c代码实现 因为要匹配,最后对检测到的角点做了SAD(效率高)
matlab代码网上down的,自己添加下采样和匹配改了个面目全非。
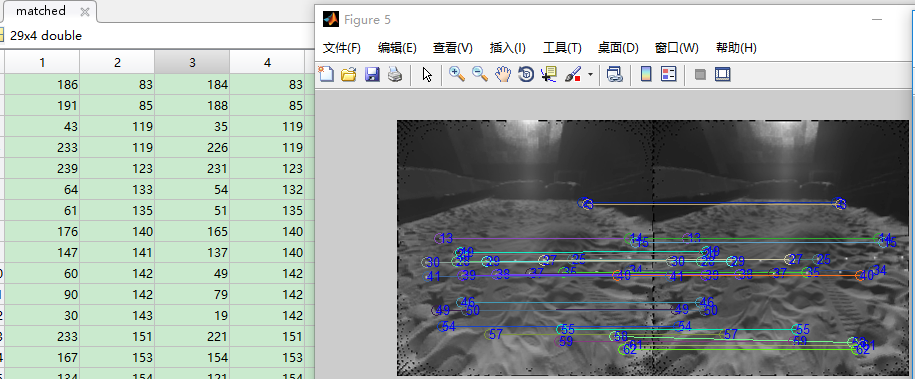
DSP输出:
Harris start: Sample = 1 , Region = 8 max R = 32487164.72,(247, 3)
1 Harris: 178, 64
2 Harris: 186, 83
3 Harris: 191, 85
4 Harris: 195, 86
5 Harris: 67, 88
6 Harris: 217, 90
7 Harris: 58, 91
8 Harris: 52, 95
9 Harris: 241, 98
10 Harris: 17,112
11 Harris: 9,114
12 Harris: 217,115
13 Harris: 43,119
14 Harris: 233,119
15 Harris: 239,123
16 Harris: 228,126
17 Harris: 11,128
18 Harris: 234,130
19 Harris: 64,133
20 Harris: 240,133
21 Harris: 61,135
22 Harris: 225,135
23 Harris: 233,138
24 Harris: 204,139
25 Harris: 176,140
26 Harris: 119,141
27 Harris: 147,141
28 Harris: 60,142
29 Harris: 90,142
30 Harris: 30,143
31 Harris: 241,144
32 Harris: 238,145
33 Harris: 225,150
34 Harris: 233,151
35 Harris: 167,153
36 Harris: 201,153
37 Harris: 134,154
38 Harris: 100,155
39 Harris: 66,156
40 Harris: 221,156
41 Harris: 31,157
42 Harris: 239,163
43 Harris: 24,168
44 Harris: 237,174
45 Harris: 34,179
46 Harris: 65,183
47 Harris: 241,185
48 Harris: 11,188
49 Harris: 40,191
50 Harris: 70,191
51 Harris: 12,200
52 Harris: 30,200
53 Harris: 26,202
54 Harris: 46,207
55 Harris: 165,210
56 Harris: 222,213
57 Harris: 93,215
58 Harris: 218,217
59 Harris: 163,222
60 Harris: 11,224
61 Harris: 233,226
62 Harris: 227,230
63 Harris: 15,232
64 Harris: 18,234
65 Harris: 239,240
66 Harris: 16,243
67 Harris: 31,244
68 Harris: 23,245
69 Harris: 194,245
70 Harris: 210,246
71 Harris: 233,246
max R = 8346880.08,(1, 113)
1 Harris: 137, 9
2 Harris: 154, 10
3 Harris: 140, 24
4 Harris: 171, 64
5 Harris: 175, 65
6 Harris: 148, 67
7 Harris: 49, 75
8 Harris: 88, 80
9 Harris: 174, 82
10 Harris: 117, 83
11 Harris: 178, 83
12 Harris: 184, 83
13 Harris: 80, 84
14 Harris: 188, 85
15 Harris: 104, 86
16 Harris: 193, 86
17 Harris: 69, 87
18 Harris: 63, 88
19 Harris: 205, 89
20 Harris: 104, 90
21 Harris: 212, 90
22 Harris: 55, 91
23 Harris: 67, 93
24 Harris: 48, 94
25 Harris: 42, 95
26 Harris: 175, 96
27 Harris: 38, 97
28 Harris: 122, 97
29 Harris: 236, 98
30 Harris: 32, 99
31 Harris: 205,104
32 Harris: 13,105
33 Harris: 44,105
34 Harris: 197,105
35 Harris: 212,105
36 Harris: 44,107
37 Harris: 34,110
38 Harris: 225,110
39 Harris: 199,111
40 Harris: 10,112
41 Harris: 65,112
42 Harris: 204,112
43 Harris: 83,114
44 Harris: 210,115
45 Harris: 217,117
46 Harris: 35,119
47 Harris: 226,119
48 Harris: 245,120
49 Harris: 192,123
50 Harris: 231,123
51 Harris: 219,125
52 Harris: 228,127
53 Harris: 185,129
54 Harris: 225,131
55 Harris: 54,132
56 Harris: 230,132
57 Harris: 208,134
58 Harris: 46,135
59 Harris: 51,135
60 Harris: 215,135
61 Harris: 201,136
62 Harris: 194,139
63 Harris: 222,139
64 Harris: 137,140
65 Harris: 165,140
66 Harris: 183,140
67 Harris: 108,141
68 Harris: 19,142
69 Harris: 34,142
70 Harris: 49,142
71 Harris: 79,142
72 Harris: 118,142
73 Harris: 203,142
74 Harris: 214,143
75 Harris: 230,144
76 Harris: 178,145
77 Harris: 227,145
78 Harris: 238,145
79 Harris: 163,146
80 Harris: 155,147
81 Harris: 180,149
82 Harris: 213,150
83 Harris: 221,151
84 Harris: 61,152
85 Harris: 154,153
86 Harris: 188,153
87 Harris: 121,154
88 Harris: 232,154
89 Harris: 87,155
90 Harris: 53,156
91 Harris: 208,156
92 Harris: 18,157
93 Harris: 74,157
94 Harris: 189,159
95 Harris: 161,162
96 Harris: 127,163
97 Harris: 166,163
98 Harris: 225,163
99 Harris: 184,164
100 Harris: 33,166
101 Harris: 52,166
102 Harris: 58,168
103 Harris: 9,169
104 Harris: 41,169
105 Harris: 218,170
106 Harris: 27,171
107 Harris: 56,172
108 Harris: 17,173
109 Harris: 135,173
110 Harris: 25,174
111 Harris: 66,174
112 Harris: 50,175
113 Harris: 222,175
114 Harris: 98,176
115 Harris: 56,177
116 Harris: 234,177
117 Harris: 17,178
118 Harris: 29,178
119 Harris: 116,179
120 Harris: 44,180
121 Harris: 131,180
122 Harris: 244,180
123 Harris: 234,181
124 Harris: 32,182
125 Harris: 14,183
126 Harris: 48,183
127 Harris: 167,183
128 Harris: 131,184
129 Harris: 140,184
130 Harris: 241,184
131 Harris: 215,186
132 Harris: 19,187
133 Harris: 223,187
134 Harris: 148,188
135 Harris: 27,189
136 Harris: 23,190
137 Harris: 31,191
138 Harris: 52,191
139 Harris: 120,192
140 Harris: 147,194
141 Harris: 167,195
142 Harris: 187,195
143 Harris: 34,197
144 Harris: 220,197
145 Harris: 193,198
146 Harris: 29,199
147 Harris: 225,199
148 Harris: 180,200
149 Harris: 189,200
150 Harris: 144,201
151 Harris: 16,203
152 Harris: 110,203
153 Harris: 147,203
154 Harris: 230,203
155 Harris: 9,204
156 Harris: 88,205
157 Harris: 182,205
158 Harris: 191,205
159 Harris: 206,206
160 Harris: 26,207
161 Harris: 144,210
162 Harris: 244,210
163 Harris: 194,211
164 Harris: 56,212
165 Harris: 202,212
166 Harris: 95,213
167 Harris: 12,215
168 Harris: 31,215
169 Harris: 72,215
170 Harris: 182,216
171 Harris: 196,216
172 Harris: 104,217
173 Harris: 112,217
174 Harris: 99,219
175 Harris: 141,222
176 Harris: 233,222
177 Harris: 200,223
178 Harris: 9,224
179 Harris: 210,226
180 Harris: 15,229
181 Harris: 147,229
182 Harris: 204,230
183 Harris: 47,234
184 Harris: 126,234
185 Harris: 139,234
186 Harris: 9,235
187 Harris: 53,236
188 Harris: 212,238
189 Harris: 129,239
190 Harris: 206,239
191 Harris: 27,240
192 Harris: 12,244
193 Harris: 190,244
194 Harris: 244,244
195 Harris: 235,245
196 Harris: 29,247
197 Harris: 210,247
Matched points: 29
0: matchedCorner[174] (163,222,141,222) d: 0.03975
1: matchedCorner[160] (165,210,144,210) d: 0.05183
2: matchedCorner[168] ( 93,215, 72,215) d: 0.05275
3: matchedCorner[84] (167,153,154,153) d: 0.05445
4: matchedCorner[89] ( 66,156, 53,156) d: 0.05949
5: matchedCorner[137] ( 70,191, 52,191) d: 0.05978
6: matchedCorner[125] ( 65,183, 48,183) d: 0.06032
7: matchedCorner[69] ( 60,142, 49,142) d: 0.06281
8: matchedCorner[91] ( 31,157, 18,157) d: 0.06552
9: matchedCorner[159] ( 46,207, 26,207) d: 0.06596
10: matchedCorner[13] (191, 85,188, 85) d: 0.06981
11: matchedCorner[178] (233,226,210,226) d: 0.07079
12: matchedCorner[70] ( 90,142, 79,142) d: 0.07585
13: matchedCorner[135] ( 40,191, 23,190) d: 0.07670
14: matchedCorner[46] (233,119,226,119) d: 0.07697
15: matchedCorner[67] ( 30,143, 19,142) d: 0.07735
16: matchedCorner[64] (176,140,165,140) d: 0.07751
17: matchedCorner[181] (227,230,204,230) d: 0.07766
18: matchedCorner[58] ( 61,135, 51,135) d: 0.07878
19: matchedCorner[11] (186, 83,184, 83) d: 0.08188
20: matchedCorner[45] ( 43,119, 35,119) d: 0.08230
21: matchedCorner[54] ( 64,133, 54,132) d: 0.08530
22: matchedCorner[86] (134,154,121,154) d: 0.08576
23: matchedCorner[49] (239,123,231,123) d: 0.08604
24: matchedCorner[88] (100,155, 87,155) d: 0.09002
25: matchedCorner[63] (147,141,137,140) d: 0.09699
26: matchedCorner[82] (233,151,221,151) d: 0.09712
27: matchedCorner[90] (221,156,208,156) d: 0.09803
28: matchedCorner[176] (218,217,200,223) d: 0.09966
29: matchedCorner[43] (217,115,210,115) d: 0.10124
30: matchedCorner[97] (239,163,225,163) d: 0.10264
31: matchedCorner[15] (195, 86,193, 86) d: 0.10453
32: matchedCorner[81] (225,150,213,150) d: 0.10457
33: matchedCorner[39] ( 17,112, 10,112) d: 0.10529
34: matchedCorner[61] (204,139,194,139) d: 0.10692
35: matchedCorner[85] (201,153,188,153) d: 0.10697
36: matchedCorner[20] (217, 90,212, 90) d: 0.10785
37: matchedCorner[66] (119,141,108,141) d: 0.10903
38: matchedCorner[96] ( 24,168,166,163) d: 0.11074
39: matchedCorner[116] ( 34,179, 17,178) d: 0.11335
40: matchedCorner[17] ( 67, 88, 63, 88) d: 0.11478
41: matchedCorner[37] (194,245,225,110) d: 0.11824
42: matchedCorner[74] (241,144,230,144) d: 0.11879
43: matchedCorner[59] (225,135,215,135) d: 0.12120
44: matchedCorner[21] ( 58, 91, 55, 91) d: 0.12153
45: matchedCorner[76] (238,145,227,145) d: 0.12230
46: matchedCorner[ 3] (178, 64,171, 64) d: 0.12550
47: matchedCorner[28] (241, 98,236, 98) d: 0.12557
48: matchedCorner[27] ( 11,188,122, 97) d: 0.13124
49: matchedCorner[23] ( 52, 95, 48, 94) d: 0.14120
50: matchedCorner[164] (222,213,202,212) d: 0.14147
51: matchedCorner[37] ( 30,200,225,110) d: 0.14359
52: matchedCorner[71] ( 11,128,118,142) d: 0.14817
53: matchedCorner[165] ( 18,234, 95,213) d: 0.14993
54: matchedCorner[55] (240,133,230,132) d: 0.15049
55: matchedCorner[188] (241,185,129,239) d: 0.15167
56: matchedCorner[112] (237,174,222,175) d: 0.15237
57: matchedCorner[53] (234,130,225,131) d: 0.15975
58: matchedCorner[94] ( 12,200,161,162) d: 0.16515
59: matchedCorner[130] (210,246,215,186) d: 0.16592
60: matchedCorner[171] ( 15,232,104,217) d: 0.17298
61: matchedCorner[62] (233,138,222,139) d: 0.17425
62: matchedCorner[77] ( 26,202,238,145) d: 0.17961
63: matchedCorner[187] (239,240,212,238) d: 0.18350
64: matchedCorner[157] ( 9,114,191,205) d: 0.18354
65: matchedCorner[19] ( 31,244,104, 90) d: 0.18516
66: matchedCorner[196] (233,246,210,247) d: 0.19022
67: matchedCorner[50] (228,126,219,125) d: 0.19145
68: matchedCorner[174] ( 11,224,141,222) d: 0.19151
69: matchedCorner[167] ( 16,243, 31,215) d: 0.22552
70: matchedCorner[163] ( 23,245, 56,212) d: 0.23696
Harris end!
SURF c代码实现 为了利用积分图最后求特征向量的时候没有旋转图像,基本是参考OpenCV和网上down到的一份matlab以及C#拼起来的
matlab代码可能来自这里,记不清楚了,总之是网上不知名大神共享的,当时连OpenCV都没用过的小白我如获至宝...
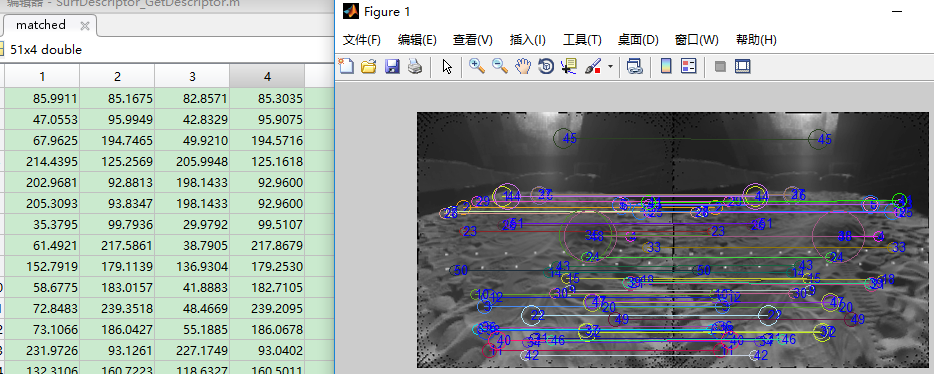
DSP输出:
OpenSURF test:
Cycle to get ipt1 is 0
Number of key points in pic1:103
Cycle to describe ipt1 is 0
Number of key points in pic2:128
Cycle to get and describe ipt2 is 0
Time to matched: 0 ms
0: matchedIpt[95] ( 85.99, 85.17, 82.86, 85.30) d: 0.00260
1: matchedIpt[70] ( 47.06, 95.99, 42.83, 95.91) d: 0.00359
2: matchedIpt[82] ( 67.96,194.75, 49.92,194.57) d: 0.00455
3: matchedIpt[13] (214.44,125.26,205.99,125.16) d: 0.00532
4: matchedIpt[69] (202.97, 92.88,198.14, 92.96) d: 0.00570
5: matchedIpt[69] (205.31, 93.83,198.14, 92.96) d: 0.00662
6: matchedIpt[ 5] ( 35.38, 99.79, 29.98, 99.51) d: 0.00670
7: matchedIpt[54] ( 61.49,217.59, 38.79,217.87) d: 0.00806
8: matchedIpt[35] (152.79,179.11,136.93,179.25) d: 0.00806
9: matchedIpt[38] ( 58.68,183.02, 41.89,182.71) d: 0.00832
10: matchedIpt[92] ( 72.85,239.35, 48.47,239.21) d: 0.00904
11: matchedIpt[80] ( 73.11,186.04, 55.19,186.07) d: 0.00931
12: matchedIpt[ 3] (231.97, 93.13,227.17, 93.04) d: 0.00975
13: matchedIpt[25] (132.31,160.72,118.63,160.50) d: 0.01006
14: matchedIpt[30] (149.93,167.20,134.69,166.84) d: 0.01027
15: matchedIpt[ 8] ( 94.27,111.85, 87.44,111.56) d: 0.01030
16: matchedIpt[94] (122.94, 83.84,119.90, 83.62) d: 0.01062
17: matchedIpt[105] (176.30,191.17,157.86,191.50) d: 0.01115
18: matchedIpt[31] (223.54,168.70,208.99,168.44) d: 0.01183
19: matchedIpt[12] ( 46.80,120.28, 38.81,119.73) d: 0.01211
20: matchedIpt[71] (224.16,100.35,219.76,100.07) d: 0.01308
21: matchedIpt[44] (186.16,195.73,166.90,195.93) d: 0.01309
22: matchedIpt[77] (213.58,172.32,198.76,172.91) d: 0.01331
23: matchedIpt[107] (115.48,203.99, 95.71,203.96) d: 0.01420
24: matchedIpt[20] (169.80,146.23,158.25,146.20) d: 0.01550
25: matchedIpt[ 7] (232.83,101.16,227.14,100.89) d: 0.01680
26: matchedIpt[ 9] ( 86.30,113.77, 79.05,113.92) d: 0.01721
27: matchedIpt[66] (122.35, 83.45,119.29, 83.40) d: 0.01780
28: matchedIpt[ 6] ( 27.53,101.58, 22.73,101.44) d: 0.01916
29: matchedIpt[ 1] ( 60.16, 90.06, 56.41, 89.71) d: 0.01963
30: matchedIpt[37] (137.53,181.55,120.93,181.54) d: 0.01971
31: matchedIpt[58] (118.01,226.98, 94.54,227.09) d: 0.02034
32: matchedIpt[112] (171.38,220.73,149.69,221.25) d: 0.02042
33: matchedIpt[17] (230.51,135.97,219.99,135.96) d: 0.02077
34: matchedIpt[61] (110.96,230.61, 87.16,230.17) d: 0.02178
35: matchedIpt[125] (169.41,123.85,166.05,124.65) d: 0.02278
36: matchedIpt[52] ( 65.81,216.05, 46.05,215.23) d: 0.02281
37: matchedIpt[87] (168.93,219.45,148.37,220.08) d: 0.02330
38: matchedIpt[110] ( 70.02,219.18, 48.17,218.89) d: 0.02513
39: matchedIpt[32] (211.27,171.33,197.11,171.64) d: 0.02650
40: matchedIpt[115] ( 81.10,228.88, 57.83,229.34) d: 0.02689
41: matchedIpt[96] (231.62, 91.24,226.57, 88.88) d: 0.02925
42: matchedIpt[64] (108.60,243.74, 82.07,243.78) d: 0.03126
43: matchedIpt[22] (140.21,154.63,127.19,154.34) d: 0.03203
44: matchedIpt[95] ( 91.32, 84.99, 82.86, 85.30) d: 0.03230
45: matchedIpt[93] (146.93, 27.16,146.03, 27.53) d: 0.03469
46: matchedIpt[60] (134.77,229.37,110.14,228.31) d: 0.03591
47: matchedIpt[105] (175.91,189.85,157.86,191.50) d: 0.04027
48: matchedIpt[125] (174.17,124.58,166.05,124.65) d: 0.04138
49: matchedIpt[85] (199.25,207.93,178.58,207.88) d: 0.04370
50: matchedIpt[24] ( 37.63,159.41, 24.60,158.93) d: 0.04504
51: matchedIpt[97] (220.12,128.17,211.02,128.12) d: 0.05070
52: matchedIpt[25] (229.83,128.56,118.63,160.50) d: 0.05942
53: matchedIpt[78] (238.84,169.78,238.67,173.68) d: 0.07877
54: matchedIpt[108] (172.92,208.34,151.75,208.93) d: 0.07884
55: matchedIpt[39] (156.11,186.26,147.67,185.59) d: 0.08015
56: matchedIpt[55] (165.94,219.38,144.14,219.32) d: 0.08813
57: matchedIpt[27] (234.62,162.62,220.43,162.56) d: 0.09373
58: matchedIpt[14] (155.06,171.10,228.58,124.93) d: 0.09682
59: matchedIpt[17] ( 38.87,167.80,219.99,135.96) d: 0.09913
60: matchedIpt[10] (218.30,114.22,211.73,114.14) d: 0.10389
61: matchedIpt[121] (227.64,178.41,205.99,178.25) d: 0.10590
62: matchedIpt[38] ( 58.80,196.00, 41.89,182.71) d: 0.10633
63: matchedIpt[34] ( 36.21,174.12, 20.49,173.70) d: 0.10729
64: matchedIpt[121] (229.02,176.50,205.99,178.25) d: 0.11332
65: matchedIpt[14] (236.82,124.87,228.58,124.93) d: 0.11353
66: matchedIpt[120] (207.85,159.31,194.75,159.18) d: 0.11531
67: matchedIpt[114] ( 51.57,229.20, 33.27,226.18) d: 0.11878
68: matchedIpt[71] (224.11,101.66,219.76,100.07) d: 0.11981
69: matchedIpt[99] ( 43.98,156.20, 31.10,155.11) d: 0.12281
70: matchedIpt[99] (241.88,195.45, 31.10,155.11) d: 0.12402
71: matchedIpt[25] (235.89,145.88,118.63,160.50) d: 0.12459
72: matchedIpt[66] (110.62,216.96,119.29, 83.40) d: 0.12702
OpenSURF end!
其实写那些代码的时候根本不懂SURF的原理,依样画葫芦竟然还画的有模有样,当然理论水平还是要跟上去。
斑点检测 尺度空间 特征点方法综述 觉得这个博客特别好,很形象的解释。
大部分参考了《图像局部不变性特征与描述》。
特征点方法 - Harris和SURF的手工实现的更多相关文章
- 特征点检测学习_2(surf算法)
依旧转载自作者:tornadomeet 出处:http://www.cnblogs.com/tornadomeet 特征点检测学习_2(surf算法) 在上篇博客特征点检测学习_1(sift算法) 中 ...
- 人脸识别经典算法一:特征脸方法(Eigenface)
这篇文章是撸主要介绍人脸识别经典方法的第一篇,后续会有其他方法更新.特征脸方法基本是将人脸识别推向真正可用的第一种方法,了解一下还是很有必要的.特征脸用到的理论基础PCA在另一篇博客里:特征脸(Eig ...
- 利用GBDT模型构造新特征具体方法
利用GBDT模型构造新特征具体方法 数据挖掘入门与实战 公众号: datadw 实际问题中,可直接用于机器学**模型的特征往往并不多.能否从"混乱"的原始log中挖掘到有用的 ...
- 调用init方法 两种方式 一个是浏览器方法 一个是 xml中手工配置(load-on-startup)
调用init方法 两种方式 一个是浏览器方法 一个是 xml中手工配置(load-on-startup)
- 经典文本特征表示方法: TF-IDF
引言 在信息检索, 文本挖掘和自然语言处理领域, IF-IDF 这个名字, 从它在 20 世纪 70 年代初被发明, 已名震江湖近半个世纪而不曾衰歇. 它表示的简单性, 应用的有效性, 使得它成为不同 ...
- OpenCV探索之路(二十三):特征检测和特征匹配方法汇总
一幅图像中总存在着其独特的像素点,这些点我们可以认为就是这幅图像的特征,成为特征点.计算机视觉领域中的很重要的图像特征匹配就是一特征点为基础而进行的,所以,如何定义和找出一幅图像中的特征点就非常重要. ...
- 图像处理检测方法 — SIFT和SURF
0.特征与匹配方法总结汇总对比 参考网址:http://simtalk.cn/2017/08/18/%E7%89%B9%E5%BE%81%E4%B8%8E%E5%8C%B9%E9%85%8D/#ORB ...
- struts_19_对Action中所有方法、某一个方法进行输入校验(手工编写代码实现输入校验)
对所有方法进行校验1.通过手工编写代码的形式实现 需求:用户名:不能为空手机号:不能为空,并且要符合手机号的格式1,3/5/8,后面是9个数字 第01步:导包 第02步:配置web.xml <? ...
- 特征选取方法PCA与LDA
一.主成分分析(PCA)介绍 什么是主成分分析? 主成分分析是一种用于连续属性降维的方法,把多指标转化为少数几个综合指标. 它构造了原始属性的一个正交变换,将一组可能相关的变量转化为一组不相关的变 ...
随机推荐
- 洛谷P3121 审查(黄金)Censoring(Gold) [USACO15FEB] AC自动机
正解:AC自动机 解题报告: 传送门! 啊我好呆啊其实就挺模板题的,,,只是要一个栈搞一下,,,然后我就不会了,,,是看了题解才get的,,,QAQ 然后写下解法趴QwQ 首先看到多串匹配不难想到AC ...
- 内核poll机制
内核版本:linux2.6.22.6 硬件平台:JZ2440 驱动源码 poll_key_int_drv.c : #include <linux/module.h> #include &l ...
- 43.1-CAN通讯
43-CAN通讯 1.CAN 协议简介 CAN是控制器局域网络(Controller Area Network)的简称,它是由研发和生产汽车电子 产品著称的德国 BOSCH 公司开发的,并最终成为国际 ...
- LVS:三种负载均衡方式比较
[转自http://soft.chinabyte.com/25/13169025.shtml] 1.什么是LVS? 首先简单介绍一下LVS (Linux Virtual Server)到底是什么东西, ...
- docker+jenkins的构建历史记录(Build History)时间不正确
1.分别查看宿主机时间和容器时间 宿主机时间 root@fcaad17f146a:/# date Fri Jan :: CST 容器时间 [root@ ~]# docker exec -ti 8798 ...
- mysql实时增量备份
采用binlog日志的好处 掌控所有更改操作,必要时可用于恢复数据 数据库主从复制的必要条件 [root@localhost~]# vim /etc/my.cnf [mysqld] .. .. log ...
- MySQL最优配置模板( 5.6&5.7转)
[client] user = root --用户 password = 1111aaA_ -- 密码 [mysql] prompt = [\\u@\\p][\\d]>\\_ -- cmd控制台 ...
- JAVA基础——时间Date类型转换
在java中有六大时间类,分别是: 1.java.util包下的Date类, 2.java.sql包下的Date类, 3.java.text包下的DateFormat类,(抽象类) 4.java.te ...
- awk命令分析日志的简单笔记
awk是一个文本分析工具,可以用来进行流量日志分析 之前无意中看到了这个命令,简单记一下笔记 ,在打线下的时候可能会有用 awk有3个不同版本: awk.nawk和gawk,未作特别说明,一般指gaw ...
- Lua获取当前时间
更多好的文章就在 blog.haoitsoft.com,请大家多多支持! local getTime = os.date(“%c”); 其中的%c可以是以下的一种:(注意大小写) %a abbrevi ...