SSD网络结构
SSD算法,其英文全名是Single Shot MultiBox Detector。
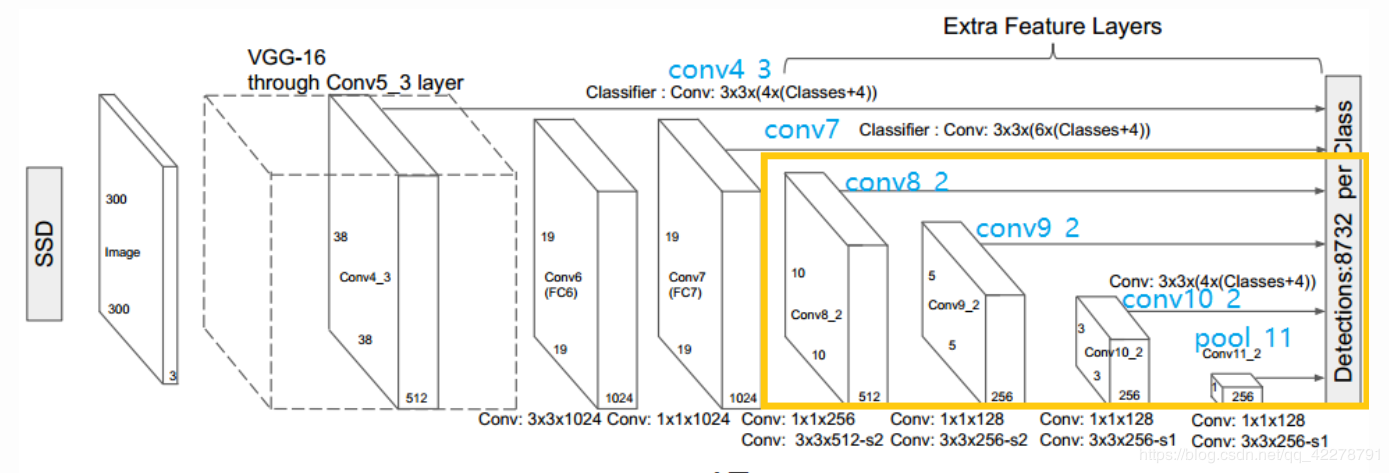
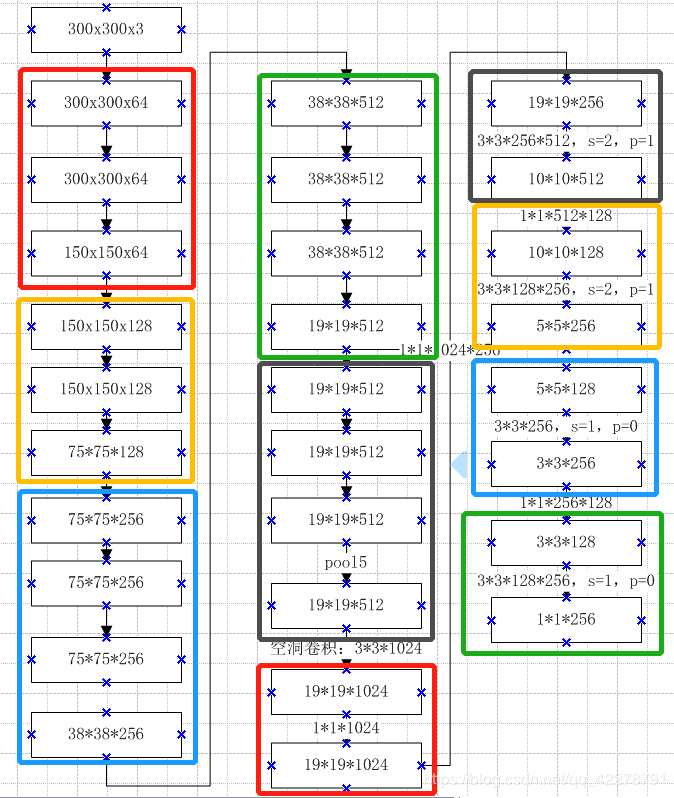
SSD的网络结构流程如下图所示:
SSD总共11个block,相比较于之前的VGG16,改变了第5个block的第4层,第6、7、8卷积层全部去掉,分别增加了红框、黑框、黄框、蓝框。
其tensorflow代码如下:
with tf.variable_scope(scope, 'ssd_300_vgg', [inputs], reuse=reuse):
# Original VGG-16 blocks.
net = slim.repeat(inputs, 2, slim.conv2d, 64, [3, 3], scope='conv1')
end_points['block1'] = net
net = slim.max_pool2d(net, [2, 2], scope='pool1')
# Block 2.
net = slim.repeat(net, 2, slim.conv2d, 128, [3, 3], scope='conv2')
end_points['block2'] = net
net = slim.max_pool2d(net, [2, 2], scope='pool2')
# Block 3.
net = slim.repeat(net, 3, slim.conv2d, 256, [3, 3], scope='conv3')
end_points['block3'] = net
net = slim.max_pool2d(net, [2, 2], scope='pool3')
# Block 4.
net = slim.repeat(net, 3, slim.conv2d, 512, [3, 3], scope='conv4')
end_points['block4'] = net
net = slim.max_pool2d(net, [2, 2], scope='pool4')
# Block 5.
net = slim.repeat(net, 3, slim.conv2d, 512, [3, 3], scope='conv5')
end_points['block5'] = net
#注意处
net = slim.max_pool2d(net, [3, 3], stride=1, scope='pool5') # Additional SSD blocks.
# Block 6: let's dilate the hell out of it!
#注意处
net = slim.conv2d(net, 1024, [3, 3], rate=6, scope='conv6')
end_points['block6'] = net
net = tf.layers.dropout(net, rate=dropout_keep_prob, training=is_training)
# Block 7: 1x1 conv. Because the fuck.
#注意处
net = slim.conv2d(net, 1024, [1, 1], scope='conv7')
end_points['block7'] = net
net = tf.layers.dropout(net, rate=dropout_keep_prob, training=is_training) # Block 8/9/10/11: 1x1 and 3x3 convolutions stride 2 (except lasts).
end_point = 'block8'
with tf.variable_scope(end_point):
net = slim.conv2d(net, 256, [1, 1], scope='conv1x1')
#注意点:实际上相当于下面的卷积操作进行padding了
net = custom_layers.pad2d(net, pad=(1, 1))
net = slim.conv2d(net, 512, [3, 3], stride=2, scope='conv3x3', padding='VALID')
end_points[end_point] = net
end_point = 'block9'
with tf.variable_scope(end_point):
net = slim.conv2d(net, 128, [1, 1], scope='conv1x1')
#注意点:实际上相当于下面的卷积操作进行padding了
net = custom_layers.pad2d(net, pad=(1, 1))
net = slim.conv2d(net, 256, [3, 3], stride=2, scope='conv3x3', padding='VALID')
end_points[end_point] = net
end_point = 'block10'
with tf.variable_scope(end_point):
net = slim.conv2d(net, 128, [1, 1], scope='conv1x1')
net = slim.conv2d(net, 256, [3, 3], scope='conv3x3', padding='VALID')
end_points[end_point] = net
end_point = 'block11'
with tf.variable_scope(end_point):
net = slim.conv2d(net, 128, [1, 1], scope='conv1x1')
net = slim.conv2d(net, 256, [3, 3], scope='conv3x3', padding='VALID')
end_points[end_point] = net
设计理念
参考博客:
SSD网络结构的更多相关文章
- SSD(single shot multibox detector)
SSD,全称Single Shot MultiBox Detector,是Wei Liu在ECCV 2016上提出的一种目标检测算法,截至目前是主要的检测框架之一,相比Faster RCNN有明显的速 ...
- AI佳作解读系列(二)——目标检测AI算法集杂谈:R-CNN,faster R-CNN,yolo,SSD,yoloV2,yoloV3
1 引言 深度学习目前已经应用到了各个领域,应用场景大体分为三类:物体识别,目标检测,自然语言处理.本文着重与分析目标检测领域的深度学习方法,对其中的经典模型框架进行深入分析. 目标检测可以理解为是物 ...
- 论文笔记 SSD: Single Shot MultiBox Detector
转载自:https://zhuanlan.zhihu.com/p/33544892 前言 目标检测近年来已经取得了很重要的进展,主流的算法主要分为两个类型(参考RefineDet):(1)two-st ...
- [目标检测]SSD原理
1 SSD基础原理 1.1 SSD网络结构 SSD使用VGG-16-Atrous作为基础网络,其中黄色部分为在VGG-16基础网络上填加的特征提取层.SSD与yolo不同之处是除了在最终特征图上做目标 ...
- 转:SSD详解
原文:http://blog.csdn.net/a8039974/article/details/77592395, http://blog.csdn.net/jesse_mx/article/det ...
- ssd原理及代码实现详解
通过https://github.com/amdegroot/ssd.pytorch,结合论文https://arxiv.org/abs/1512.02325来理解ssd. ssd由三部分组成: ba ...
- 【目标检测】SSD:
slides 讲得是相当清楚了: http://www.cs.unc.edu/~wliu/papers/ssd_eccv2016_slide.pdf 配合中文翻译来看: https://www.cnb ...
- 检测算法简介及其原理——fast R-CNN,faster R-CNN,YOLO,SSD,YOLOv2,YOLOv3
1 引言 深度学习目前已经应用到了各个领域,应用场景大体分为三类:物体识别,目标检测,自然语言处理.本文着重与分析目标检测领域的深度学习方法,对其中的经典模型框架进行深入分析. 目标检测可以理解为是物 ...
- 五、SSD原理(Single Shot MultiBox Detector)
主流的算法主要分为两个类型: (1)tow-stage R-CNN系列算法,其主要思路是先通过启发式方法(selective search)或者CNN网络(RPN)产生一些列稀疏的候选框,然后对这些候 ...
随机推荐
- 使用Surface View来显示图片
public class YUVImageView extends SurfaceView { private static final String TAG = "YUVImageView ...
- Sql 将A表数据插入到B表
A表和B表字段不同 --insert into B(Name,PersonalId,Education,IsDel) select Name, PersonId as PersonalId, ( ca ...
- 【记录】vue相关知识点
let let是es6新引入的命令,与var命令类似,但是let是声明的局部变量,只在所在代码块中有效. ES5 只有全局作用域和函数作用域,没有块级作用域,这带来很多不合理的场景. var s = ...
- linux 命令 - ls(列出目录内容)
ls - 列出目录内容 语法: ls (选项) (参数) 选项: -a:显示所有档案及目录(ls内定将档案名或目录名称为“.”的视为影藏,不会列出): -A:显示除影藏文件“.”和“..”以外的所有文 ...
- Codeforces 353E 贪心
题意:给你一张有向图,第i条边连接i号点和(i + 1) % n号点,问最多可以选择多少个点,使得这些点互相不可达. 思路:容易发现,如果某个边的集合点的数目大于等于2,那么就可以选出一个点,当然也可 ...
- hdu4857 拓扑排序
题目大意: 糟糕的事情发生啦,现在大家都忙着逃命.但是逃命的通道很窄,大家只能排成一行. 现在有n个人,从1标号到n.同时有一些奇怪的约束条件,每个都形如:a必须在b之前. 同时,社会是不平等的,这些 ...
- JavaSE---Annotation
1.概述 1.1 JDK1.5开始,java提供了对Annotation的支持: 1.2 Annotation其实就是 代码中的特殊标记,这些标记 可以在编译.类加载.运行时被读取,并执行相应的处理: ...
- PHP chroot() 函数
改变根目录: <?php// Change root directorychroot("/path/to/chroot/"); // Get current director ...
- OC学习篇之---对象的拷贝
在前一篇文章中我们说到了如何解决对象的循环引用问题:http://blog.csdn.net/jiangwei0910410003/article/details/41926369,这一篇文章我们就来 ...
- 集训队8月2日(BFS)
看书情况:109~124页 刷题数:6 今天把上两次比赛的该补的题都补了,补题有博客,还写了两道书上例题的博客. 书上例题 BFS思维https://www.cnblogs.com/246247839 ...