Jacobian矩阵、Hessian矩阵和Newton's method
在寻找极大极小值的过程中,有一个经典的算法叫做Newton's method,在学习Newton's method的过程中,会引入两个矩阵,使得理解的难度增大,下面就对这个问题进行描述。
1, Jacobian矩阵矩阵
对于一个向量函数F:$R_{n}$ -> $R{m}$是一个从欧式n维到欧式m维空间的函数(好像有点难理解,请看下面),这个函数由m个实函数组成,每一个函数的输入自变量是n维的向量,即$(y_{1}(x_{1},\cdots,x_{n}), \cdots,y_{m}(x_{1},\cdots,x_{n}))^\mathrm{T}$,这些函数的偏导数(如果存在)将组成一个 m × n 的矩阵,称这个矩阵为 Jacobian矩阵
$J_{F}(x_{1},\cdots,x_{n}) = \left[ \begin{matrix}
\frac{∂y_{1}}{∂x_{1}}&\cdots&\frac{∂y_{1}}{∂x_{n}}\\
\vdots&\cdots&\vdots\\
\frac{∂y_{m}}{∂x_{1}}&\cdots&\frac{∂y_{m}}{∂x_{n}}
\end{matrix}\right]$
Jacobian矩阵的形式比较好理解;
首先我们已经有了 m × 1 的函数向量
$\left[ \begin{matrix}
y_{1}\\
\vdots\\
y_{m}
\end{matrix}\right]$
具体到每一个函数而言, 函数值y是标量, 对函数的每一个自变量 $x_{1},\cdots,x_{n}$求偏导,并将求偏导的结果横向放成一排,因为有 m 个函数,一共有 m 排:
$\left[ \begin{matrix}
\frac{∂y_{1}}{∂x_{1}}&\cdots&\frac{∂y_{1}}{∂x_{n}}\\
\vdots&\cdots&\vdots\\
\frac{∂y_{m}}{∂x_{1}}&\cdots&\frac{∂y_{m}}{∂x_{n}}
\end{matrix}\right]$
下面来讨论一下这个矩阵的几何意义: 首先看Jacobian的每一行:
每一行的节点值是函数在对应参数下的偏导,以向量的角度可以理解为梯度,梯度指向方向导数最大的方向,该最大值即为梯度向量的模
设 $\vec{u}$ 是梯度向量, $\vec{v} = x - p$,$\vec{t}$是 $\vec{v} $上的单位向量
现在已知梯度u,已知方向v,还定义了方向上的单位向量,根据方向导数的性质:
$\frac{∂f}{∂l} = \left\Vert u \right\Vert\left\Vert t \right\Vert cosθ$
再将单位向量延拓成v:
则$ <u, v> = \left\Vert u\right\Vert\left\Vert v\right\Vert cosθ = \frac{∂f}{∂l} \left\Vert v\right\Vert $
其中 $\frac{∂f}{∂l}$ 是方向导数,对应的几何意义就是切线的斜率k, $\left\Vert v \right\Vert$ 是梯度方向上的递增向量,对应 $\Delta x$,最后乘积的结果就是 $\Delta y$
通常,在点p的一个很小的范围内,我们认为函数y是线性的,可以用一个线性函数 y‘ 近似替代函数 y,而这个 y’ 的解析表达式就是:
$y' ≈ y_{p} + k\Delta x = y_{p} + <u, v>$
然后把 m 个函数都放在一起考虑, 用矩阵乘法代替 <u, v>可以得到:
$F(x) ≈ F(p) + J_{F}(p) (x - x_{p})$
2, Hessian矩阵
定义:Hessian矩阵是一个自变量为向量的实值函数的二阶偏导数组成的方块矩阵,此函数如下:
$f(x_{1}, x{2}, \cdots, x_{n})$
则Hessian矩阵为:
$H(f) = \left[\begin{matrix}
\frac{∂f^{2}}{∂x_{1}∂x_{1}}&\cdots&\frac{∂f^{2}}{∂x_{1}∂x_{n}}\\
\vdots&\cdots&\vdots\\
\frac{∂f^{2}}{∂x_{n}∂x_{1}}&\cdots&\frac{∂f^{2}}{∂x_{n}∂x_{n}}\\
\end{matrix}\right]$
那么Hessian矩阵是怎么来的呢?从定义出发:
首先 f 是一个自变量为向量的函数,函数值是一个标量(这个跟Jacobian矩阵的出发点就不一样)
对于标量函数 f, 对其求一阶偏导数,并将求导的结果按列排列
$\left[\begin{matrix}
\frac{∂f}{∂x_{1}}\\
\frac{∂f}{∂x_{2}}\\
\vdots\\
\frac{∂f}{∂x_{n}}\\
\end{matrix}\right]$
在一阶导数的基础上,对每个节点求二阶导数,并将求导的结果以列进行排列:
$\left[\begin{matrix}
\frac{∂f^{2}}{∂x_{1}∂x_{1}}&\cdots&\frac{∂f^{2}}{∂x_{1}∂x_{n}}\\
\vdots&\cdots&\vdots\\
\frac{∂f^{2}}{∂x_{n}∂x_{1}}&\cdots&\frac{∂f^{2}}{∂x_{n}∂x_{n}}\\
\end{matrix}\right]$
3, 泰勒级数
在讲解牛顿法之前,我们先来讲一下泰勒级数,考虑如下物理模型:
有一个物体,它以某种方式运动(现在还不知道到底是什么方式),现在能够观测到的是它在一段时间内的运动轨迹 s(t),并且有一把神器的尺子,可以测量指定点的任意阶导数(如果存在的话):
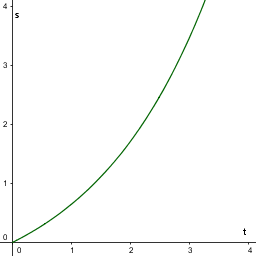
现在我们假设物体是匀速运动,v = const
并且 速度 v = 初始时刻的速度 = s'(t) (位移的导数是速度)
按照我们的假设,物体的运动轨迹应该就是这样:

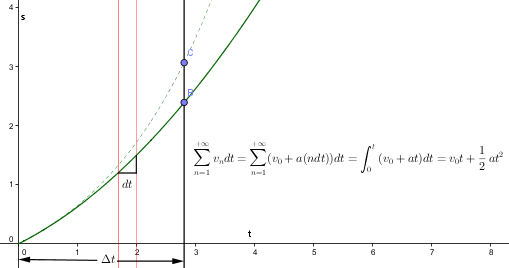
虚线是物体实际的运动轨迹,实现是拟合出来的轨迹。可以看到,在 $t = t_{0}$附近,实际轨迹与拟合轨迹比较接近,一点时间$\Delta t$后,差距就出来了:物体实际运动到了位置C,我们拟合的位置还在B
问题在哪里?因为我们假定物体是匀速运动,并且假定0点之后的速度一直等于0点的速度,但是很明显,物体实际是加速运动。
现在我们来修改我们的假设模型,物体是加速运动,并假定加速度 a = const
并且 加速度 a = 初始时刻的加速度 = s‘’(t) (位移的二阶导数是加速度)
采用加速运动模型更能反映物体的实际运动状态,但还是达不到我们的要求
很显然,物体比我们拟合的运动还是要快一些,以我们目前的加速度还跟不上物体的速度
让我们再来修改一下假设模型,物体是加速运动,并且加速度不是恒定的,加速度的加速度 w 才是恒定的
并且 加速度的加速度 w = 初始时刻加速度的加速度 s'''(有点绕口令的感觉)

离我们的目标更进了一步,理论上,只要 n 阶导数存在,我们可以按照这种思想,不断加速加速,最终让B -> C
为了描述方便,我故意将初始状态设为 t = 0, s = 0, 其实我们也不一定非得局限于此,初始状态设为 $t = t_{0}, s = s_{0}$也是可以的
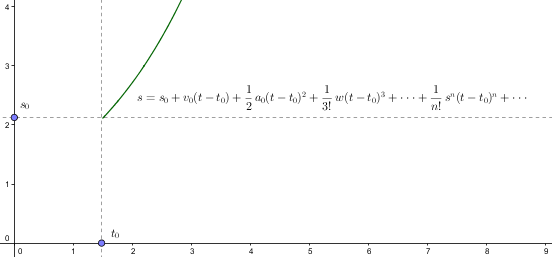
最后,我们来做一下变量替换,就成我们的泰勒级数了
$f(x) = f(x_{0}) + f'(x_{0})(x - x_{0}) + \frac{1}{2}f''(x_{0})(x - x_{0})^{2} + \frac{1}{3!}f'''(x_{0})(x-x_{0})^{3} + \cdots + \frac{1}{n!}f^{(n)}(x-x_{0})^{n} + \cdots $
泰勒级数向我们展示了一种思想:函数上的任一点的值,都可以用函数上某点的值$f(x_{0})$与第n(n >= 1)阶导数 = 常数 这个模型去逼近
4, Newton‘s method
但对于非线性优化问题,牛顿法提供了一种求解的办法. 假设任务是优化一个目标函数 f , 求函数 f 的极大极小问题。直接求解 f 的极小值比较困难,常将这种问题转换为求 f’ = 0的问题。
首先我们来看一下牛顿法怎么来找 f(x) = 0的点
为了求解 f(x) = 0,常将f(x)在 $x = x_{n}$处用泰勒级数展开:
$f(x) = f(x_{n}) + f'(x_{n})(x - x_{n}) + o(x - x_{n})^{2}$
这个公式的意思是:我知道函数上某一点 $f(x_{n})$的值是不为0的,我现在就用 $y = f(x_{n})$ + $f'(x)(x - x_{n}) $这个模型来逼近函数 f(x)(当然也可以用高阶导数,但是高阶导数徒增计算的困难外没有任何好处)

很明显,我用线性方程拟合出来的函数衰减比较快,线性函数与实际函数都是从P出发, 线性函数会提前到达 y = 0的位置,这个时候它会回过头取查看实际函数的位置,发现它还在点 S, 于是他又退回到S, 并用S处的导数重新拟合出新的线性函数,然后.....
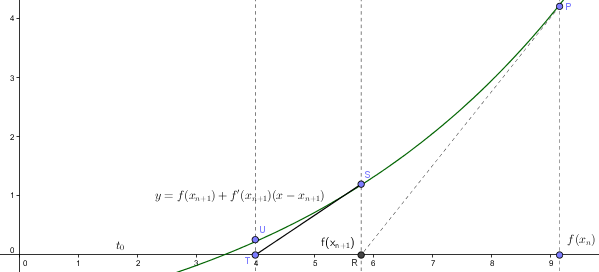
从图形的变化趋势可以看出,算法收敛到 f(x) = 0 的点
整个过程就好比:A、B从同一起点以同样的速度向0点赛跑,A的速度是恒定的,B的耐力不好,速度越跑越慢,于是A先到达了终点,A到达之后,觉得没意思,回过头去找B(穿越过去),并且参考B当前的速度,再次在同一起跑线采用相同的速度一起向终点进发,来回折腾了几次之后,A和B终于一起手牵手走向了终点(0点)。
归纳后的算法思想为:
$x_{n+1} := x_{n} - \frac{f(x_{n})}{f'(x_{n})}$
从几何上很容易理解,不需要过多的说明。
牛顿法求 f(x) = 0 一般是有效的,不过我们现在的问题是求 f(x)的极大值或极小值,即 f'(x) = 0 的位置,所以牛顿法正确的使用方式是:
$x_{n+1} := x_{n} - \frac{f'(x_{n})}{f''(x_{n})}$
上面我们讨论的都是单变量问题,如果输入参数 x 是一个向量,牛顿法就演变成:
$X_{n+1} := X_{n} - \frac{J_{f}(X_{n})}{H(X_{n})} = X_{n} - H^{-1}(X_{n})J_{f}(X_{n})$
$J_{f}(X_{n})$是我们前面介绍过的 Jacobian 矩阵,对应标量方程组的一阶导数
$H(X_{n})$ 是Hessian矩阵,对应标量方程的二阶导数
Jacobian矩阵、Hessian矩阵和Newton's method的更多相关文章
- 三维重建面试4:Jacobian矩阵和Hessian矩阵
在使用BA平差之前,对每一个观测方程,得到一个代价函数.对多个路标,会产生一个多个代价函数的和的形式,对这个和进行最小二乘法进行求解,使用优化方法.相当于同时对相机位姿和路标进行调整,这就是所谓的BA ...
- Jacobian矩阵和Hessian矩阵
1.Jacobian矩阵 在矩阵论中,Jacobian矩阵是一阶偏导矩阵,其行列式称为Jacobian行列式.假设 函数 $f:R^n \to R^m$, 输入是向量 $x \in R^n$ ,输出为 ...
- 梯度vs Jacobian矩阵vs Hessian矩阵
梯度向量 定义: 目标函数f为单变量,是关于自变量向量x=(x1,x2,-,xn)T的函数, 单变量函数f对向量x求梯度,结果为一个与向量x同维度的向量,称之为梯度向量: 1. Jacobian 在向 ...
- Hessian矩阵与牛顿法
Hessian矩阵与牛顿法 牛顿法 主要有两方面的应用: 1. 求方程的根: 2. 求解最优化方法: 一. 为什么要用牛顿法求方程的根? 问题很多,牛顿法 是什么?目前还没有讲清楚,没关系,先直观理解 ...
- Hessian矩阵
http://baike.baidu.com/link?url=o1ts6Eirjn5mHQCZUHGykiI8tDIdtHHOe6IDXagtcvF9ncOfdDOzT8tmFj41_DEsiUCr ...
- Hessian矩阵【转】
http://blog.sina.com.cn/s/blog_7e1ecaf30100wgfw.html 在数学中,海塞矩阵是一个自变量为向量的实值函数的二阶偏导数组成的方块矩阵,一元函数就是二阶导, ...
- Hessian矩阵与多元函数极值
Hessian矩阵与多元函数极值 海塞矩阵(Hessian Matrix),又译作海森矩阵,是一个多元函数的二阶偏导数构成的方阵.虽然它是一个具有悠久历史的数学成果.可是在机器学习和图像处理(比如SI ...
- 【机器学习】梯度、Hessian矩阵、平面方程的法线以及函数导数的含义
想必单独论及" 梯度.Hessian矩阵.平面方程的法线以及函数导数"等四个基本概念的时候,绝大部分人都能够很容易地谈个一二三,基本没有问题. 其实在应用的时候,这几个概念经常被混 ...
- 梯度、Hessian矩阵、平面方程的法线以及函数导数的含义
本文转载自: Xianling Mao的专栏 =========================================================================== 想 ...
随机推荐
- Django学习笔记之视图高级-错误处理
错误处理 在一些网站开发中.经常会需要捕获一些错误,然后将这些错误返回比较优美的界面,或者是将这个错误的请求做一些日志保存.那么我们本节就来讲讲如何实现. 常见的错误码 404:服务器没有指定的url ...
- jquery怎么选择嵌套的第一层的li
$(".ra").click(function(){ var id=$(this).children("ul").attr("id"); i ...
- Android嵌套滑动不流畅记录随笔
---恢复内容开始--- 今天第一次用到ScrollView嵌套RecyclerView来做页面. 刚开始效果开心得很,非常Very漂亮噢! 纳尼!!!沃特Fuck!出事儿,出事儿! 滑动为何如此不流 ...
- CentOS 7中允许远程连接mariadb数据库
# /etc/init.d/mysql restart 或者 service mysqld start 启动服务 # /etc/init.d/mysql stop 或者 service mysqld ...
- 【CentOS】自定义服务添加
1.创建服务需要执行的脚本 cd /sb/scripts vi td-agent-testlog #!/bin/bash # # /etc/rc.d/init.d/td-agent-DC01 # # ...
- python判断平台
网上找到的判断平台的方法,特此记录 # -*- coding: utf-8 -*- import platform osName = platform.system() if(osName == 'W ...
- EDI error
WE20里面partenr也维护,还是报这个错误,有两个原因: 1: partner status不是ACTIVE的状态. 2. message control里面没有维护新增的output type ...
- C++日常应用-定时器
定时器的使用:分为有句柄 无句柄两类 有句柄情况下的使用:头文件: 1.添加映射 BEGIN_MSG_MAP(类名) MESSAGE_HANDLER(WM_TIMER, OnTimer) END_MS ...
- WRF安装过程
WRF安装过程 1. 在虚拟机VMware上安装Fedora 12 x64操作系统. 2. 安装PGI9.01 a) 电驴上可下载[[顶级编译器].PGI.Workstation.C ...
- 彻底解决windows10+matlab2018a调用libsvm时出现找不到编译器问题
本文转载自:Shane Zhao博客(CSDN) https://blog.csdn.net/silence2015/article/details/53106156 个人申明,只是因为解决这个问题花 ...