[Reinforcement Learning] Model-Free Control
上篇总结了 Model-Free Predict 问题及方法,本文内容介绍 Model-Free Control 方法,即 "Optimise the value function of an unknown MDP"。
在这里说明下,Model-Free Predict/Control 不仅适用于 Model-Free 的情况,其同样适用于 MDP 已知的问题:
- MDP model is unknown, but experience can be sampled.
- MDP model is known, but is too big to use, except by samples.
在正式介绍 Model-Free Control 方法之前,我们先介绍下 On-policy Learning 及 Off-policy Learning。
On-policy Learning vs. Off-policy Learning
On-policy Learning:
- "Learn on the job"
- Learn about policy \(\pi\) from experience sampled from \(\pi\)(即采样的策略与学习的策略一致)
Off-policy Learning:
- "Look over someone's shoulder"
- Learn about policy \(\pi\) from experience sampled from \(\mu\)(即采样的策略与学习的策略不一致)
On-Policy Monte-Carlo Learning
Generalized Policy Iteration
具体的 Control 方法,在《动态规划》一文中我们提到了 Model-based 下的广义策略迭代 GPI 框架,那在 Model-Free 情况下是否同样适用呢?
如下图为 Model-based 下的广义策略迭代 GPI 框架,主要分两部分:策略评估及基于 Greedy 策略的策略提升。
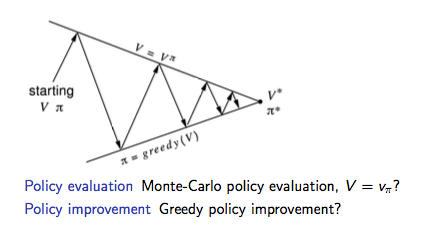
Model-Free 策略评估
在《Model-Free Predict》中我们分别介绍了两种 Model-Free 的策略评估方法:MC 和 TD。我们先讨论使用 MC 情况下的 Model-Free 策略评估。
如上图GPI框架所示:
- 基于 \(V(s)\) 的贪婪策略提升需要 MDP 已知:
\[\pi'(s) = \arg\max_{a\in A}\Bigl(R_{s}^{a}+P_{ss'}^{a}V(s')\Bigr)\] - 基于 \(Q(s, a)\) 的贪婪策略提升不需要 MDP 已知,即 Model-Free:
\[\pi'(s) = \arg\max_{a\in A}Q(s, a)\]
因此 Model-Free 下需要对 \(Q(s, a)\) 策略评估,整个GPI策略迭代也要基于 \(Q(s, a)\)。
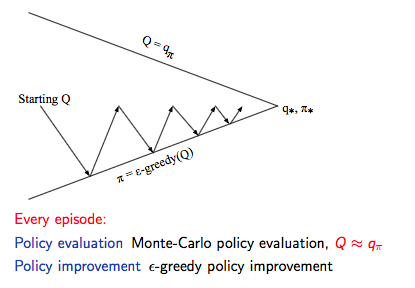
Model-Free 策略提升
确定了策略评估的对象,那接下来要考虑的就是如何基于策略评估的结果 \(Q(s, a)\) 进行策略提升。
由于 Model-Free 的策略评估基于对经验的 samples(即评估的 \(q(s, a)\) 存在 bias),因此我们在这里不采用纯粹的 greedy 策略,防止因为策略评估的偏差导致整个策略迭代进入局部最优,而是采用具有 explore 功能的 \(\epsilon\)-greedy 算法:
\[
\pi(a|s) =
\begin{cases}
&\frac{\epsilon}{m} + 1 - \epsilon, &\text{if } a^*=\arg\max_{a\in A}Q(s, a)\\
&\frac{\epsilon}{m}, &\text{otherwise}
\end{cases}
\]
因此,我们确定了 Model-Free 下的 Monto-Carlo Control:
GLIE
先直接贴下David的课件,GLIE 介绍如下:
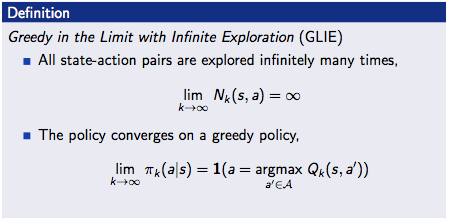
对于 \(\epsilon\)-greedy 算法而言,如果 \(\epsilon\) 随着迭代次数逐步减为0,那么 \(\epsilon\)-greedy 是 GLIE,即:
\[\epsilon_{k} = \frac{1}{k}\]
GLIE Monto-Carlo Control
GLIE Monto-Carlo Control:
- 对于 episode 中的每个状态 \(S_{t}\) 和动作 \(A_t\):
\[
N(S_t, A_t) ← N(S_t, A_t) + 1 \\
Q(S_t, A_t) ← Q(S_t, A_t) + \frac{1}{N(S_t, A_t)}(G_t - Q(S_t, A_t))
\] - 基于新的动作价值函数提升策略:
\[
\epsilon ← \frac{1}{k}\\
\pi ← \epsilon\text{-greedy}(Q)
\]
定理:GLIE Monto-Carlo Control 收敛到最优的动作价值函数,即:\(Q(s, a) → q_*(s, a)\)。
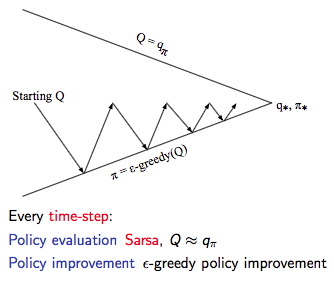
On-Policy Temporal-Difference Learning
Sarsa
我们之前总结过 TD 相对 MC 的优势:
- 低方差
- Online
- 非完整序列
那么一个很自然的想法就是在整个控制闭环中用 TD 代替 MC:
- 使用 TD 来计算 \(Q(S, A)\)
- 仍然使用 \(\epsilon\)-greedy 策略提升
- 每一个 step 进行更新
通过上述改变就使得 On-Policy 的蒙特卡洛方法变成了著名的 Sarsa。
- 更新动作价值函数
- Control
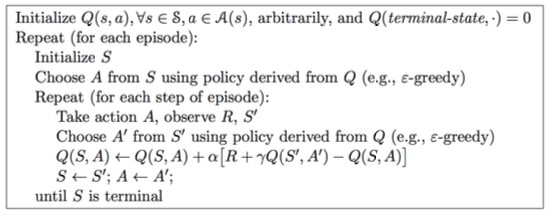
Sarsa算法的伪代码如下:
Sarsa(λ)
n-step Sarsa returns 可以表示如下:
\(n=1\) 时:\(q_{t}^{(1)} = R_{t+1} + \gamma Q(S_{t+1})\)
\(n=2\) 时:\(q_{t}^{(2)} = R_{t+1} + \gamma R_{t+2} + \gamma^2 Q(S_{t+2})\)
...
\(n=\infty\) 时:\(q_{t}^{\infty} = R_{t+1} + \gamma R_{t+2} + ... + \gamma^{T-1} R_T\)
因此,n-step return \(q_{t}^{(n)} = R_{t+1} + \gamma R_{t+2} + ... + \gamma^{n}Q(S_{t+n})\)
n-step Sarsa 更新公式:
\[Q(S_t, A_t) ← Q(S_t, A_t) + \alpha (q_t^{(n)} - Q(S_t, A_t))\]
具体的 Sarsa(λ) 算法伪代码如下:
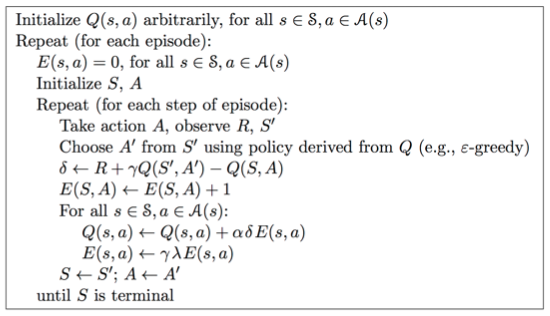
其中 \(E(s, a)\) 为资格迹。
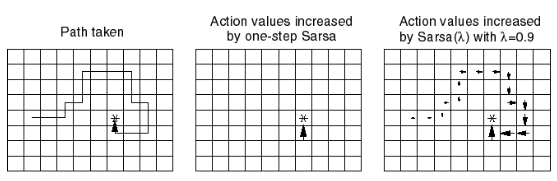
下图为 Sarsa(λ) 用于 Gridworld 例子的示意图:
Off-Policy Learning
Off-Policy Learning 的特点是评估目标策略 \(\pi(a|s)\) 来计算 \(v_{\pi}(s)\) 或者 \(q_{\pi}(s, a)\),但是跟随行为策略 \(\{S_1, A_1, R_2, ..., S_T\}\sim\mu(a|s)\)。
Off-Policy Learning 有什么意义?
- Learn from observing humans or other agents
- Re-use experience generated from old policies \(\pi_1, \pi_2, ..., \pi_{t-1}\)
- Learn about optimal policy while following exploratory policy
- Learn about multiple policies while following one policy
重要性采样
重要性采样的目的是:Estimate the expectation of a different distribution。
\[
\begin{align}
E_{X\sim P}[f(X)]
&= \sum P(X)f(X)\\
&= \sum Q(X)\frac{P(X)}{Q(X)}f(X)\\
&= E_{X\sim Q}[\frac{P(X)}{Q(X)}f(X)]
\end{align}
\]
Off-Policy MC 重要性采样
使用策略 \(\pi\) 产生的 return 来评估 \(\mu\):
\[G_t^{\pi/\mu} = \frac{\pi(A_t|S_t)}{\mu(A_t|S_t)} \frac{\pi(A_{t+1}|S_{t+1})}{\mu(A_{t+1}|S_{t+1})}...\frac{\pi(A_T|S_T)}{\mu(A_T|S_T)}G_t\]
朝着正确的 return 方向去更新价值:
\[V(S_t) ← V(S_t) + \alpha\Bigl(\color{Red}{G_t^{\pi/\mu}}-V(S_t)\Bigr)\]
需要注意两点:
- Cannot use if \(\mu\) is zero when \(\pi\) is non-zero
- 重要性采样会显著性地提升方差
Off-Policy TD 重要性采样
TD 是单步的,所以使用策略 \(\pi\) 产生的 TD targets 来评估 \(\mu\):
\[V(S_t) ← V(S_t) + \alpha\Bigl(\frac{\pi(A_t|S_t)}{\mu(A_t|S_t)}(R_{t+1}+\gamma V(S_{t+1}))-V(S_t)\Bigr)\]
- 方差比MC版本的重要性采样低很多
Q-Learning
前面分别介绍了对价值函数 \(V(s)\) 进行 off-policy 学习,现在我们讨论如何对动作价值函数 \(Q(s, a)\) 进行 off-policy 学习:
- 不需要重要性采样
- 使用行为策略选出下一步的动作:\(A_{t+1}\sim\mu(·|S_t)\)
- 但是仍需要考虑另一个后继动作:\(A'\sim\pi(·|S_t)\)
- 朝着另一个后继动作的价值更新 \(Q(S_t, A_t)\):
\[Q(S_t, A_t) ← Q(S_t, A_t) + \alpha\Bigl(R_{t+1}+\gamma Q(S_{t+1}, A')-Q(S_t, A_t)\Bigr)\]
讨论完对动作价值函数的学习,我们接着看如何通过 Q-Learning 进行 Control:
- 行为策略和目标策略均改进
- 目标策略 \(\pi\) 以greedy方式改进:
\[\pi(S_t) = \arg\max_{a'}Q(S_{t+1}, a')\] - 行为策略 \(\mu\) 以 \(\epsilon\)-greedy 方式改进
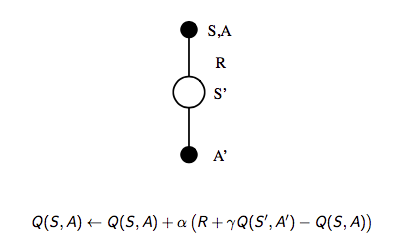
- Q-Learning target:
\[
\begin{align}
&R_{t+1}+\gamma Q(S_{t+1}, A')\\
=&R_{t+1}+\gamma Q\Bigl(S_{t+1}, \arg\max_{a'}Q(S_{t+1}, a')\Bigr)\\
=&R_{t+1}+\max_{a'}\gamma Q(S_{t+1}, a')
\end{align}
\]
Q-Learning 的 backup tree 如下所示:
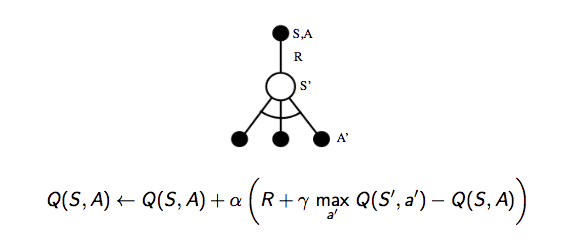
关于 Q-Learning 的结论:
Q-learning control converges to the optimal action-value function, \(Q(s, a)→q_*(s, a)\)
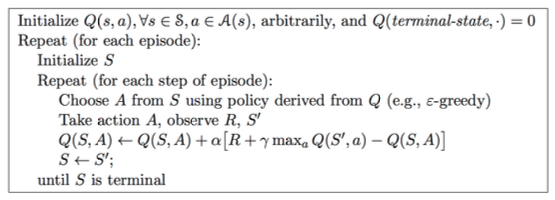
Q-Learning 算法具体的伪代码如下:
对比 Sarsa 与 Q-Learning 可以发现两个最重要的区别:
- TD target 公式不同
- Q-Learning 中下一步的动作从行为策略中选出,而不是目标策略
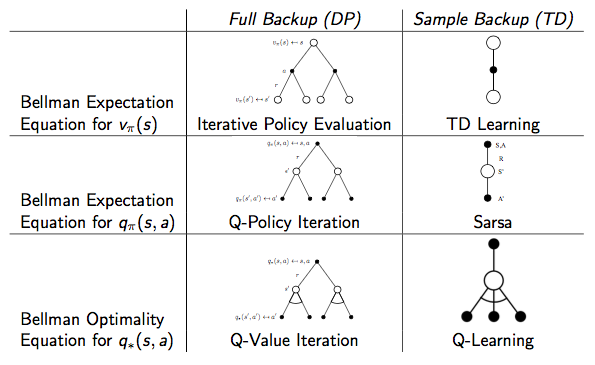
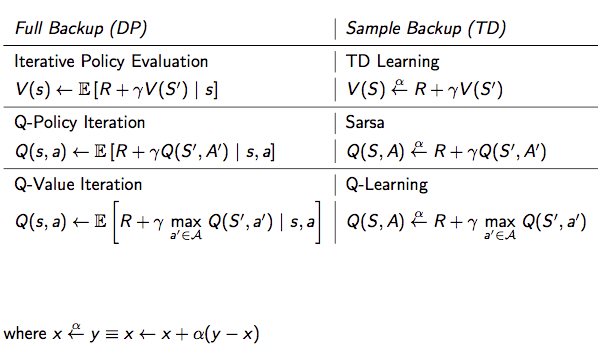
DP vs. TD
两者的区别见下表:
Reference
[1] Reinforcement Learning: An Introduction, Richard S. Sutton and Andrew G. Barto, 2018
[2] David Silver's Homepage
[Reinforcement Learning] Model-Free Control的更多相关文章
- DRL前沿之:Benchmarking Deep Reinforcement Learning for Continuous Control
1 前言 Deep Reinforcement Learning可以说是当前深度学习领域最前沿的研究方向,研究的目标即让机器人具备决策及运动控制能力.话说人类创造的机器灵活性还远远低于某些低等生物,比 ...
- A neural reinforcement learning model for tasks with unknown time delays
郑重声明:原文参见标题,如有侵权,请联系作者,将会撤销发布! Abstract 我们提出了一个基于生物学的神经模型,能够在复杂的任务中执行强化学习.该模型的独特之处在于,它能够在一个动作.状态转换和奖 ...
- (zhuan) Deep Reinforcement Learning Papers
Deep Reinforcement Learning Papers A list of recent papers regarding deep reinforcement learning. Th ...
- 论文笔记之:Human-level control through deep reinforcement learning
Human-level control through deep reinforcement learning Nature 2015 Google DeepMind Abstract RL 理论 在 ...
- 增强学习(Reinforcement Learning and Control)
增强学习(Reinforcement Learning and Control) [pdf版本]增强学习.pdf 在之前的讨论中,我们总是给定一个样本x,然后给或者不给label y.之后对样本进行 ...
- 深度学习国外课程资料(Deep Learning for Self-Driving Cars)+(Deep Reinforcement Learning and Control )
MIT(Deep Learning for Self-Driving Cars) CMU(Deep Reinforcement Learning and Control ) 参考网址: 1 Deep ...
- Reinforcement Learning for Self Organization and Power Control of Two-Tier Heterogeneous Networks
R. Amiri, M. A. Almasi, J. G. Andrews and H. Mehrpouyan, "Reinforcement Learning for Self Organ ...
- 深度强化学习介绍 【PPT】 Human-level control through deep reinforcement learning (DQN)
这个是平时在实验室讲reinforcement learning 的时候用到PPT, 交期末作业.汇报都是一直用的这个,觉得比较不错,保存一下,也为分享,最早该PPT源于师弟汇报所做.
- (转) Deep Reinforcement Learning: Playing a Racing Game
Byte Tank Posts Archive Deep Reinforcement Learning: Playing a Racing Game OCT 6TH, 2016 Agent playi ...
随机推荐
- Linux(二)—— Unix&Linux 的基本概念
Linux(二)-- Unix&Linux 的基本概念 计算机 = 主机(host)+ 终端(terminal) 主机 = 内核 + 实用工具 内核(kernel) 当计算机启动时,计算机要经 ...
- windows常用目录
启动目录位置 %USERPROFILE%\AppData\Roaming\Microsoft\Windows\Start Menu\Programs\Startup
- poium测试库介绍
poium测试库前身为selenium-page-objects测试库,我在以前的文章中也有介绍过:这可能是最简单的Page Object库,项目的核心是基于Page Objects实现元素定位的封装 ...
- BAT面试题:请使用递归构建N叉树
题目要求: 现在我们拥有全国的省.市.县.镇的行政信息,比如 浙江省 -> 杭州市 -> 西湖区 --> xx街道,请将这些信息构建成一棵树,根节点为全国,叶子节点为镇. 我的误解: ...
- 【网站公告】请大家不要发表任何涉及“得到App”的内容
大家好,今天我们收到来自杭州某某网络科技有限公司的维权骑士团队的邮件,说他们受某某(天津)文化传播有限公司委托,展开维权.园子里有些博主因为学习“得到App”的课程在博客中记了一些笔记,也被维权. 为 ...
- 分布式存储ceph——(6)ceph 讲解
一.Ceph简介: Ceph是一种为优秀的性能.可靠性和可扩展性而设计的统一的.分布式文件系统.ceph 的统一体现在可以提供文件系统.块存储和对象存储,分布式体现在可以动态扩展.在国内一些公司的云环 ...
- java易混淆知识小结
1.java的基本数据类型,及所占字节和范围 byte: 字节型,占1个字节,8位,范围是 -2^7 ~ 2^7-1 short:短整型,占2个字节,16位,范围是 -2^15 ~ 2^15 ...
- 【c的文件操作】文本文件和二进制文件(内存映像)的不同 文件结尾判断feof , EOF
查看 stdio.h 可以看到如下定义: #define EOF (-1) #define _IOEOF 0x0010 #define feof(_stream) ((_stream)- ...
- 手动安装Package Control
手动下载一个package control的包:https://github.com/wbond/package_control 然后Download ZIP后,解压,将解压后的文件夹重命名为 Pac ...
- 编译安装MySQL5.6失败的相关问题解决方案
Q0:需要安装git 解决方案: #CentOS yum install git #ubuntu apt-get install git Q1:CMAKE_CXX_COMPILER could be ...