Genesis 多边形闭轮廓填充算法
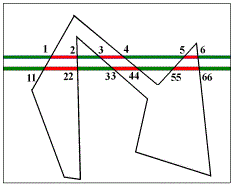
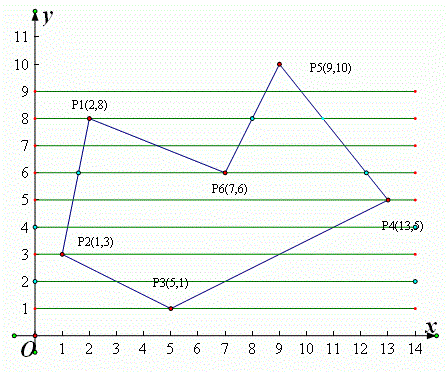
通过逐行扫描,计算得出直线与多边形相交点进行求解
原理图形如下所示:
相关函数:
/// <summary>
/// 求点P到线段L距离
/// </summary>
/// <param name="p"></param>
/// <param name="l"></param>
/// <param name="return_p"></param>
/// <param name="is_calc_width"></param>
/// <returns></returns>
public double p2l_di(gP p, gL l, gPoint return_p, bool is_calc_width = false)
{
double b, s, a_side, b_side, c_side;
a_side = p2p_di(p.p, l.ps);
if (a_side < eps) return ;
b_side = p2p_di(p.p, l.pe);
if (b_side < eps) return ;
c_side = p2p_di(l.ps, l.pe);
if (b_side < eps) return a_side; //' 钝角或直角三角形
if (a_side * a_side >= b_side * b_side + c_side * c_side)
{
return_p = l.pe;
if (is_calc_width)
return b_side - p.width * 0.0005 - l.width * 0.0005;
else
return b_side;
} if (b_side * b_side >= a_side * a_side + c_side * c_side)
{
return_p = l.ps;
if (is_calc_width)
return a_side - p.width * 0.0005 - l.width * 0.0005;
else
return a_side;
} // 锐角三角形
return_p = p2l_toP(p.p, l);
b = (a_side + b_side + c_side) * 0.5;
s = Math.Sqrt(b * (b - a_side) * (b - b_side) * (b - c_side));
if (is_calc_width)
return s * / c_side - p.width * 0.0005 - l.width * 0.0005;
else
return s * / c_side;
}
/// <summary>
/// 求点P到线L垂足P
/// </summary>
/// <param name="p"></param>
/// <param name="l"></param>
/// <returns></returns>
public gPoint p2l_toP(gPoint p, gL l)
{
gPoint tempP;
if (Math.Abs(l.ps.x - l.pe.x) < eps)//垂直
{
tempP.x = (l.ps.x + l.pe.x) * 0.5;
tempP.y = p.y;
}
else if (Math.Abs(l.ps.y - l.pe.y) < eps) //水平
{
tempP.x = p.x;
tempP.y = (l.ps.y + l.pe.y) * 0.5;
}
else
{
double k = (l.pe.y - l.ps.y) / (l.pe.x - l.ps.x);
tempP.x = (p.y - l.ps.y + k * l.ps.x + p.x * k) * (k + * k);
tempP.y = p.y - (tempP.x - p.x) / k;
}
return tempP;
}
/// <summary>
/// 求线段与线段交点
/// </summary>
/// <param name="l1ps"></param>
/// <param name="l1pe"></param>
/// <param name="l2ps"></param>
/// <param name="l2pe"></param>
/// <param name="isIntersect"></param>
/// <returns></returns>
public gPoint l2l_Intersect(gPoint l1ps, gPoint l1pe, gPoint l2ps, gPoint l2pe, ref bool isIntersect)
{
gL L1 = new gL(l1ps, l1pe, );
gL L2 = new gL(l2ps, l2pe, );
gPoint tempP = new gPoint();
double ABC, ABD, CDA, CDB, T;
//面积符号相同则两点在线段同侧,不相交 (对点在线段上的情况,本例当作不相交处理)
ABC = (L1.ps.x - L2.ps.x) * (L1.pe.y - L2.ps.y) - (L1.ps.y - L2.ps.y) * (L1.pe.x - L2.ps.x);
ABD = (L1.ps.x - L2.pe.x) * (L1.pe.y - L2.pe.y) - (L1.ps.y - L2.pe.y) * (L1.pe.x - L2.pe.x);
CDA = (L2.ps.x - L1.ps.x) * (L2.pe.y - L1.ps.y) - (L2.ps.y - L1.ps.y) * (L2.pe.x - L1.ps.x); // 三角形cda 面积的2倍 // 注意: 这里有一个小优化.不需要再用公式计算面积,而是通过已知的三个面积加减得出.
CDB = CDA + ABC - ABD; // 三角形cdb 面积的2倍
isIntersect = (CDA * CDB <= ) && (ABC * ABD <= );
//计算交点
T = CDA / (ABD - ABC);
tempP.x = L1.ps.x + T * (L1.pe.x - L1.ps.x);
tempP.y = L1.ps.y + T * (L1.pe.y - L1.ps.y);
return tempP;
}
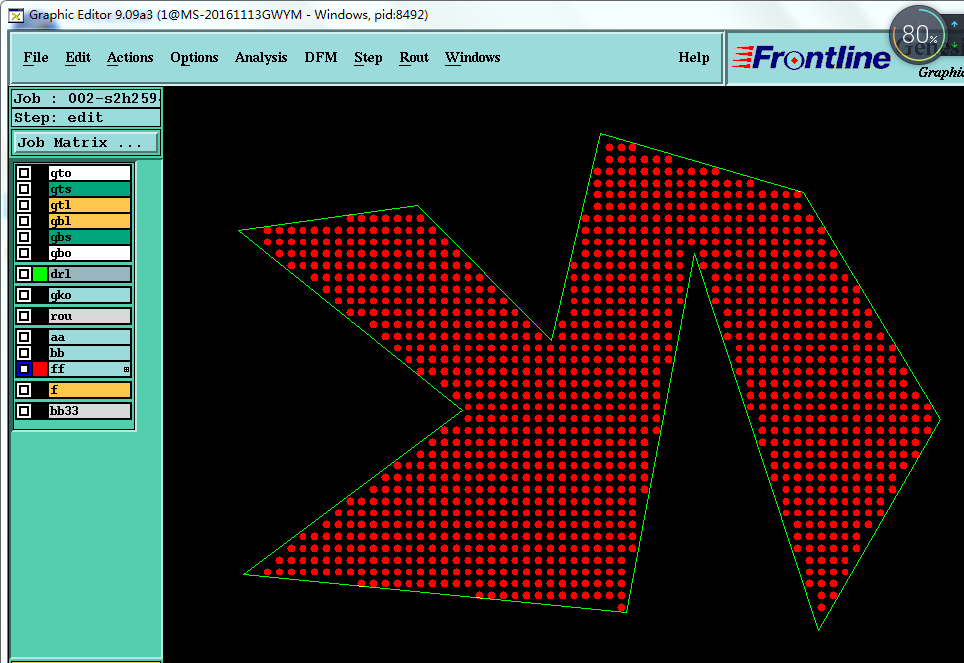
Genesis实现后图示:
相关链接:http://www.cnblogs.com/zjutlitao/p/4117223.html
Genesis 多边形闭轮廓填充算法的更多相关文章
- OpenCV探索之路(十一):轮廓查找和多边形包围轮廓
Canny一类的边缘检测算法可以根据像素之间的差异,检测出轮廓边界的像素,但它没有将轮廓作为一个整体.所以要将轮廓提起出来,就必须将这些边缘像素组装成轮廓. OpenCV中有一个很强大的函数,它可以从 ...
- OpenCV计算机视觉学习(8)——图像轮廓处理(轮廓绘制,轮廓检索,轮廓填充,轮廓近似)
如果需要处理的原图及代码,请移步小编的GitHub地址 传送门:请点击我 如果点击有误:https://github.com/LeBron-Jian/ComputerVisionPractice 1, ...
- OpenCV空洞填充算法
讨论帖: http://bbs.csdn.net/topics/391542633 在Matlab下,使用imfill可以很容易的完成孔洞填充操作,感觉这是一个极为常用的方法,然而不知道为什么Op ...
- CGA填充算法之种子填充算法
CGA填充算法之种子填充算法 平面区域填充算法是计算机图形学领域的一个很重要的算法,区域填充即给出一个区域的边界 (也可以是没有边界,只是给出指定颜色),要求将边界范围内的所有象素单元都修改成指定的颜 ...
- JAVA实现种子填充算法
种子填充算法原理在网上很多地方都能找到,这篇是继上篇扫描线算法后另一种填充算法,直接上实现代码啦0.0 我的实现只是实现了种子填充算法,但是运行效率不快,如果大佬有改进方法,欢迎和我交流,谢谢! 最后 ...
- 种子填充算法描述及C++代码实现
项目需要看了种子填充算法,改进了算法主要去除面积小的部分.种子填充算法分为两种,简单的和基于扫描线的方法,简单的算法如下描述(笔者针对的是二值图像): (1)从上到下,从左到有,依次扫描每个像素: ( ...
- 图像处理之泛洪填充算法(Flood Fill Algorithm)
泛洪填充算法(Flood Fill Algorithm) 泛洪填充算法又称洪水填充算法是在很多图形绘制软件中常用的填充算法,最熟悉不过就是 windows paint的油漆桶功能.算法的原理很简单,就 ...
- 漫水填充算法 - cvFloodFill() 实现
前言 漫水填充算法是用来标记一片区域的:设置一个种子点,然后种子点附近的相似点都被填充同一种颜色. 该算法应用性很广,比如目标识别,photoshop 的魔术棒功能等等,是填充类算法中应用最为广泛的一 ...
- Open gl 的不规则图形的4联通种子递归填充和扫描线种子递归填充算法实现
实验题目:不规则区域的填充算法 实验目的:验证不规则区域的填充算法 实验内容:利用VC与OpenGL,实现不规则区域的填充算法. 1.必做:实现简单递归的不规则区域填充算法. 2.选做:针对简单递归算 ...
随机推荐
- 批量注释LOG
sed -i "s/LOG/\/\/ LOG/g" `grep LOG\(TRACE\) -rl .`
- Lazarus Reading XML- with TXMLDocument and TXPathVariable
也就是使用XPath的方式,具体语法规则查看http://www.w3school.com.cn/xpath/xpath_syntax.asp,说明得相当详细.这里列举例子是说明在Lazarus/FP ...
- javascript 大数据处理方法
随着前端的飞速发展,在浏览器端完成复杂的计算,支配并处理大量数据已经屡见不鲜.那么,如何在最小化内存消耗的前提下,高效优雅地完成复杂场景的处理,越来越考验开发者功力,也直接决定了程序的性能. 本文展现 ...
- Luogu P1041 [2003NOIP提高组]传染病控制
P1041 传染病控制 题目背景 近来,一种新的传染病肆虐全球.蓬莱国也发现了零星感染者,为防止该病在蓬莱国大范围流行,该国政府决定不惜一切代价控制传染病的蔓延.不幸的是,由于人们尚未完全认识这种传染 ...
- poj3176-Cow Bowling【dp】
The cows don't use actual bowling balls when they go bowling. They each take a number (in the range ...
- Python time & random模块
time模块 三种时间表示 在Python中,通常有这几种方式来表示时间: 时间戳(timestamp) : 通常来说,时间戳表示的是从1970年1月1日00:00:00开始按秒计算的 ...
- hdu2015 偶数求和【C++】
偶数求和 Time Limit: 2000/1000 MS (Java/Others) Memory Limit: 65536/32768 K (Java/Others)Total Submis ...
- 【Codeforces 4D】Mysterious Present
[链接] 我是链接,点我呀:) [题意] 要求长度和宽度都严格递增(选择一个序列) 然后你一开始有一个长度和宽度 要求这个一开始所给的长度和宽度能接在你选择的一段连续的长度宽度的开头 (且保持原来的性 ...
- Codeforces Round #400 (Div. 1 + Div. 2, combined)——ABCDE
题目戳这里 A.A Serial Killer 题目描述似乎很恶心,结合样例和样例解释猜测的题意 使用C++11的auto可以来一手骚操作 #include <bits/stdc++.h> ...
- [bzoj2783][JLOI2012]树_树的遍历
树 bzoj2783 JLOI2012 题目大意:给定一棵n个点的树.求满足条件的路径条数.说一个路径是满足条件的,当且仅当这条路径上每个节点深度依次递增且点权和为S. 注释:$1\le n\le 1 ...