day-15 用opencv怎么扫描图像,利用查找表和计时
一、本节知识预览
1、 怎样遍历图像的每一个像素点?
2、 opencv图像矩阵怎么被存储的?
3、 怎样衡量我们算法的性能?
4、 什么是查表,为什么要使用它们?
二、什么是查表,为什么要使用它们?
假设一张三通道RGB图像,每个像素通道有256种不同颜色取值,那么一个像素点可能有256*256*256(1600多万)种可能颜色取值,这对于实际计算来说,开销是相当大的。而实际计算中,只需要少量的颜色值就能达到相同的效果。常用的一种方法是进行颜色空间缩减。用如下方法,我们可以将颜色空间取值减少10倍:

然而如果对每个像素点,都应用一次公式减少颜色空间取值,开销仍然很大,因此我们引入一个新方法:查表。
//定义查表
uchar table[256];
int divideWidth = 10;
for (int i = 0;i < 256; ++i)
{
table[i] = (uchar)(divideWidth*(i/divideWidth));
}
divideWith可以简单理解为取值减少的倍数,例如取值为10,颜色取值由256种可能变成25种。单个像素也只有25*25*25(15625)种可能,较之前1600多万种,计算量极大减少。然后将某个像素点某个通道的值,作为查表的数组索引,可以直接获取到最后的颜色值,避免了数学运算的工作量。
三、怎样衡量我们算法的性能?
opencv中,我们需要经常衡量一个接口/算法的时间,通过使用Opencv两个自带的函数cv::getTickCount()和cv::getTickFrequency()可以实现,前者记录从系统启动开始CPU计数次数,后者记录CPU计数频率,可用如下代码实现时间衡量:
double t = (double)getTickCount(); // do something ... t = ((double)getTickCount() - t)/getTickFrequency(); cout << "Times passed in seconds: " << t << endl;
四、opencv图像矩阵怎么被存储的?
再来回顾下之前的问题,图像是怎么在内存中被存储的。假设我们的图像是一张n*m的灰度图像,在内存中的存储方式将会是这样的:
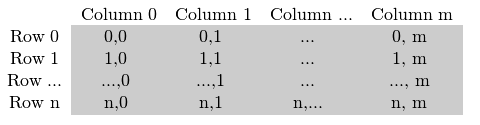
如果图像是一张RGB多通道图像,实际在内存中存储是这样的:

可以注意到,通道顺序是BGR而不是原有的RGB。另外由于我们的内存足够大,我们的矩阵可以一行接一行连续被存储,这样可以加快图像扫描的速度,通过cv::Mat::isContinuous()函数确认图像是否被连续存储。
五、怎样遍历图像的每一个像素点?
一谈到性能,没有什么能比C 风格的[]数组访问操作更高效了,因此可以用如下高效的方式实现查表法减少颜色空间取值:
Mat& ScanImageAndReduceC(Mat& I,const uchar* const table)
{
//accept only char type matrices
CV_Assert(I.depth() == CV_8U);
int channels = I.channels();
int nRows = I.rows;
int nCols = I.cols*channels;
if(I.isContinuous())
{
nCols *= nRows;
nRows = 1;
} int i,j;
uchar *p;
for ( i = 0; i < nRows; ++i)
{
p = I.ptr<uchar>(i);
for(j = 0;j < nCols;++j)
{
p[j] = table[p[j]];
}
}
return I;
}
此外,我们还可以通过opencv提供的递归方法实现图像的遍历:
Mat& ScanImageAndReduceIterator(Mat& I,const uchar* const table)
{
CV_Assert(I.depth() == CV_8U);
const int channels = I.channels();
switch(channels)
{
case 1:
{
MatIterator_<uchar> it,end;
for( it = I.begin<uchar>(),end = I.end<uchar>();it != end;++it)
{
*it = table[*it];
}
break;
}
case 3:
{
MatIterator_<Vec3b> it,end;
for(it = I.begin<Vec3b>(),end = I.end<Vec3b>();it != end;++it)
{
(*it)[0] = table[(*it)[0]];
(*it)[1] = table[(*it)[1]];
(*it)[2] = table[(*it)[2]];
}
break;
}
}
return I;
}
同时,还可以使用at方法实时计算图像坐标实现图像的遍历,新定义Mat_<Vec3b> _I是为了编码偷懒的方式,可以直接使用()运算符而不是at函数:
Mat& ScanImageAndReduceRandomAccess(Mat& I,const uchar * const table)
{
CV_Assert(I.depth() == CV_8U);
const int channels = I.channels();
switch(channels)
{
case 1:
{
for (int i = 0;i < I.rows;++i)
for (int j = 0; j < I.cols; ++j)
{
I.at<uchar>(i,j) = table[I.at<uchar>(i,j)];
}
break;
}
case 3:
{
Mat_<Vec3b> _I = I;
for (int i = 0;i < I.rows; ++i)
for (int j = 0;j < I.cols; ++j)
{
//_I.at<Vec3b>(i,j)[0] = table[_I.at<Vec3b>(i,j)[0]];
//_I.at<Vec3b>(i,j)[1] = table[_I.at<Vec3b>(i,j)[1]];
//_I.at<Vec3b>(i,j)[2] = table[_I.at<Vec3b>(i,j)[2]];
_I(i,j)[0] = table[_I(i,j)[0]];
_I(i,j)[1] = table[_I(i,j)[1]];
_I(i,j)[2] = table[_I(i,j)[2]];
}
I = _I;
break;
}
}
return I;
}
OpenCV库也为我们提供一个快速查表的库函数:
Mat lookUpTable(1, 256, CV_8U);
uchar* p = lookUpTable.ptr();
for( int i = 0; i < 256; ++i)
p[i] = table[i];
LUT(I, lookUpTable, J);
最后,我们附上整个程序源码,通过调用摄像头,获取图像,然后对前100帧图像利用查表法进行颜色空间缩减:
#include<opencv2/opencv.hpp>
#include<cv.h> using namespace cv;
using namespace std; Mat& ScanImageAndReduceC(Mat& I,const uchar* const table)
{
//accept only char type matrices
CV_Assert(I.depth() == CV_8U);
int channels = I.channels();
int nRows = I.rows;
int nCols = I.cols*channels;
if(I.isContinuous())
{
nCols *= nRows;
nRows = 1;
} int i,j;
uchar *p;
for ( i = 0; i < nRows; ++i)
{
p = I.ptr<uchar>(i);
for(j = 0;j < nCols;++j)
{
p[j] = table[p[j]];
}
}
return I;
} Mat& ScanImageAndReduceIterator(Mat& I,const uchar* const table)
{
CV_Assert(I.depth() == CV_8U);
const int channels = I.channels();
switch(channels)
{
case 1:
{
MatIterator_<uchar> it,end;
for( it = I.begin<uchar>(),end = I.end<uchar>();it != end;++it)
{
*it = table[*it];
}
break;
}
case 3:
{
MatIterator_<Vec3b> it,end;
for(it = I.begin<Vec3b>(),end = I.end<Vec3b>();it != end;++it)
{
(*it)[0] = table[(*it)[0]];
(*it)[1] = table[(*it)[1]];
(*it)[2] = table[(*it)[2]];
}
break;
}
}
return I;
} Mat& ScanImageAndReduceRandomAccess(Mat& I,const uchar * const table)
{
CV_Assert(I.depth() == CV_8U);
const int channels = I.channels();
switch(channels)
{
case 1:
{
for (int i = 0;i < I.rows;++i)
for (int j = 0; j < I.cols; ++j)
{
I.at<uchar>(i,j) = table[I.at<uchar>(i,j)];
}
break;
}
case 3:
{
Mat_<Vec3b> _I = I;
for (int i = 0;i < I.rows; ++i)
for (int j = 0;j < I.cols; ++j)
{
//_I.at<Vec3b>(i,j)[0] = table[_I.at<Vec3b>(i,j)[0]];
//_I.at<Vec3b>(i,j)[1] = table[_I.at<Vec3b>(i,j)[1]];
//_I.at<Vec3b>(i,j)[2] = table[_I.at<Vec3b>(i,j)[2]];
_I(i,j)[0] = table[_I(i,j)[0]];
_I(i,j)[1] = table[_I(i,j)[1]];
_I(i,j)[2] = table[_I(i,j)[2]];
}
I = _I;
break;
}
}
return I;
} Mat& ScanImageAndReduceLut(Mat& I,Mat& J,const uchar * const table)
{
Mat lookUpTable(1,256,CV_8U);
uchar* p = lookUpTable.ptr();
for ( int i = 0;i < 256; ++i)
p[i] = table[i];
LUT(I,lookUpTable,J);
return J;
} int main( )
{
Mat frame_input,frame_src,frame_reduce_c,frame_reduce_iterator,frame_reduce_random_access,frame_reduce_lut;
VideoCapture capture(0);
if(capture.isOpened())
{
printf("打开摄像头成功\n");
capture >> frame_input;
printf("图像分辨率为:%d * %d,通道数为%d\n",frame_input.rows,frame_input.cols,frame_input.channels());
} //定义查表
uchar table[256];
int divideWidth = 30;
for (int i = 0;i < 256; ++i)
{
table[i] = (uchar)(divideWidth*(i/divideWidth));
} float time_cnts_c = 0,time_cnts_iterator = 0,time_cnts_random_access = 0,time_cnts_lut = 0;
double tick = 0,number = 0; while(number < 100){ ++number;
printf("读取第%f帧图像\n",number); capture >> frame_input;
if(frame_input.empty()){
printf("--(!) No captured frame -- Break!");
}
else{ frame_src = frame_input.clone();
frame_reduce_c = frame_input.clone();
frame_reduce_iterator = frame_input.clone();
frame_reduce_random_access = frame_input.clone(); tick = getTickCount();
ScanImageAndReduceC(frame_reduce_c,table);
time_cnts_c += ((double)getTickCount()- tick)*1000 / getTickFrequency(); tick = getTickCount();
ScanImageAndReduceIterator(frame_reduce_iterator,table);
time_cnts_iterator += ((double)getTickCount()- tick)*1000 / getTickFrequency(); tick = getTickCount();
ScanImageAndReduceRandomAccess(frame_reduce_random_access,table);
time_cnts_random_access += ((double)getTickCount()- tick)*1000 / getTickFrequency(); tick = getTickCount();
ScanImageAndReduceLut(frame_src,frame_reduce_lut,table);
time_cnts_lut += ((double)getTickCount()- tick)*1000 / getTickFrequency(); imshow("原始图像", frame_src);
imshow("ScanImageAndReduceC",frame_reduce_c);
imshow("ScanImageAndReduceIterator",frame_reduce_iterator);
imshow("ScanImageAndReduceRandomAccess",frame_reduce_random_access);
imshow("ScanImageAndReduceLut",frame_reduce_lut); }
waitKey(10);
} printf("time_cnts_c:%f\n",time_cnts_c/100);
printf("time_cnts_iterator:%f\n",time_cnts_iterator/100);
printf("time_cnts_random_access:%f\n",time_cnts_random_access/100);
printf("time_cnts_lut:%f\n",time_cnts_lut/100); waitKey(1000000);
return 0;
}
六、实验结果
opencv教程给出的时间参考如下:
https://docs.opencv.org/master/db/da5/tutorial_how_to_scan_images.html
|
Method |
Time |
|
Efficient Way |
79.4717 milliseconds |
|
Iterator |
83.7201 milliseconds |
|
On-The-Fly RA |
93.7878 milliseconds |
|
LUT function |
32.5759 milliseconds |
实际在我们环境上(480*640,3通道)测试的结果如下:
|
Method |
Time |
|
Efficient Way |
4.605026 milliseconds |
|
Iterator |
92.846123 milliseconds |
|
On-The-Fly RA |
240.321487 milliseconds |
|
LUT function |
3.741437 milliseconds |
实验结果表明,使用opencv自带的LUT函数,效率最高。这是因为OpenCV内建的多线程原因。其次是c语言高效的[]数组访问方式。
day-15 用opencv怎么扫描图像,利用查找表和计时的更多相关文章
- OpenCV学习笔记:如何扫描图像、利用查找表和计时
目的 我们将探索以下问题的答案: 如何遍历图像中的每一个像素? OpenCV的矩阵值是如何存储的? 如何测试我们所实现算法的性能? 查找表是什么?为什么要用它? 测试用例 这里我们测试的,是一种简单的 ...
- 1.2OpenCV如何扫描图像,利用查找表和计时
查找表 颜色缩减法:如果矩阵元素存储的是单通道像素,使用C或C++的无符号字符类型,那么像素可有256个不同值. 但若是三通道图像,这种存储格式的颜色数就太多了(确切地说,有一千六百多万种).用如此之 ...
- OpenCV从入门到放弃系列之——如何扫描图像、利用查找表和计时
目的 如何遍历图像中的每一个像素? OpenCV的矩阵值是如何存储的? 如何测试我们所实现算法的性能? 查找表是什么?为什么要用它? 测试用例 颜色空间缩减.具体做法就是:将现有颜色空间值除以某个输入 ...
- 第三节,使用OpenCV 3处理图像(模糊滤波、边缘检测)
一 不同色彩空间的转换 OpenCV中有数百种关于在不同色彩空间之间转换的方法.当前,在计算机中有三种常用的色彩空间:灰度,BGR以及HSV(Hue,Saturation,Value). 灰度色彩空间 ...
- 从 TWAIN 设备中扫描图像
转自(http://yonsm.net/scan-images-from-a-twain-device/) 一.简介 TWAIN 数据源管理程序 (DSM) 工业标准的软件库,用于从静态图像设备提取图 ...
- [OpenCV实战]46 在OpenCV下应用图像强度变换实现图像对比度均衡
本文主要介绍基于图像强度变换算法来实现图像对比度均衡.通过图像对比度均衡能够抑制图像中的无效信息,使图像转换为更符合计算机或人处理分析的形式,以提高图像的视觉价值和使用价值.本文主要通过OpenCV ...
- opencv提取截获图像(总结摘来)
opencv提取截获图像(总结摘来) http://blog.csdn.net/wuxiaoyao12/article/details/7305865 版权声明:本文为博主原创文章,未经博主允许不得转 ...
- metasploit常用服务扫描和利用模块
metasploit常用服务扫描和利用模块 SMB扫描 smb枚举auxiliary/scanner/smb/smb_enumusers 扫描命名管道auxiliary/scanner/smb/pip ...
- 14.使用Crunch创建字典----Armitage扫描和利用----设置虚拟渗透测试实验室----proxychains最大匿名
使用Crunch创建字典 kali自带的字典 usr/share/wordlists cd Desktop mkdir wordlists cd wordlists/ crunch --help cr ...
随机推荐
- unittest单元测试框架之unittest 框架的总结2(八)
unittest 下的属性 1.Unittest.TestCase:所有测试用例类继承的基本类 2.Unittest.main():将一个单元测试模块变为可直接运行的测试脚本 If __name__ ...
- DML-修改
一, 修改单表的记录 语法: update 表名 set 字段=值[where 筛选条件] 二,修改多表 update 表名 别名 inner/left/rigth join 表二 on 连接条件 s ...
- js检测是否可以访问公网服务器
wifi认证开发过程所用到的,源码如下: 注:检测AC是否放行成功,是否可以访问公网阿里云服务器 功能调用: checkNet().then(function(res) { if(res) { //连 ...
- 字符串和日期的相互转换,在oracle和mysql的用法
1. 字符串转日期格式 Oracle to_date(字符串 , 日期格式) 日期格式如下: D 一周中的星期几 DAY 天的名字,使用空格填充到9个字符 DD 月中的第几天 DDD 年中的第几天 D ...
- Vue项目用webpack打包后,预览时资源路径出错(文末有vue项目链接分享)
最近用vue写了一些项目,项目写完之后需要打包之后才能放到网上展示,所以在这里记录一下项目打包的过程以及遇到的一些问题. --------------------------------------- ...
- Java分布式锁之数据库方式实现
之前的文章<Java分布式锁实现>中列举了分布式锁的3种实现方式,分别是基于数据库实现,基于缓存实现和基于zookeeper实现.三种实现方式各有可取之处,本篇文章就详细讲解一下Java分 ...
- h5图片上传简易版(FileReader+FormData+ajax)
一.选择图片(input的file类型) <input type="file" id="inputImg"> 1. input的file类型会渲染为 ...
- eclipse创建maven项目及Javaweb项目
1.开启eclipse,右键new——>other,如下图找到maven project 2.选择maven project,显示创建maven项目的窗口 3.在搜索框中搜索“web”,选择,n ...
- git小技巧之分支、关联远程仓库、回滚、解决.gitignore不生效等
1.分支管理 新建并切换分支:git checkout -b <name>新建本地分支并关联到远程分支git checkout -b myRelease origin/Release合并某 ...
- java入门---基本数据类型之内置数据类型
变量就是申请内存来存储值.也就是说,当创建变量的时候,需要在内存中申请空间.内存管理系统根据变量的类型为变量分配存储空间,分配的空间只能用来储存该类型数据. 因此,通过定义不同类型的变 ...