【Ray Tracing in One Weekend 超详解】 光线追踪1-8 自定义相机设计
今天,我们来学习如何设计自定义位置的相机
ready
我们只需要了解我们之前的坐标体系,或者说是相机位置

先看效果
Chapter10:Positionable camera
这一章我们直接用概念贯穿整章
1.fov: field of view
它是一个角度
它分为两种:垂直方向岔开的角度(vfov)和水平方向岔开的角度(hfov)
vfov即相机在垂直方向上从屏幕顶端扫描到底部所岔开的视角角度
hfov即相机在水平方向上从屏幕左端扫描到右端所岔开的视角角度
2.aspect:屏幕宽高比
我们之前是通过直接定义屏幕的坐标位置来确定屏幕,现在,我们可以通过相机参数来确定屏幕
目前,我们暂时还用ready中的坐标,相机在原点,屏幕中心在(0,0,-1)
我们习惯采用vfov,这里我们假设一直vfov和aspect
眼睛离屏幕中心的距离为dis(也就是1)
根据 tan(vfov/2) = (屏幕高/2)/dis
得到 屏幕高 = 2 * dis * tan(vfov/2)
则,屏幕上边界为 y_up = dis * tan(vfov/2)
屏幕下边界为 y_bottom = - y_up
屏幕宽 = 屏幕高 * aspect
则,屏幕左边界为 x_left = - 屏幕宽/2
屏幕右边界为 x_right = - x_left
所以,我们目前的相机类如下:
/// camera.h // -----------------------------------------------------
// [author] lv
// [begin ] 2019.1
// [brief ] the camera-class for the ray-tracing project
// from the 《ray tracing in one week》
// ----------------------------------------------------- #ifndef CAMERA_H
#define CAMERA_H #include "ray.h" namespace rt
{ class camera
{
public:
camera(rtvar vfov, rtvar aspect)
:_eye(rtvec(.,.,.))
{
rtvar theta = vfov * π / ;
rtvar half_height = tan(theta / );
rtvar half_width = aspect * half_height;
_start = rtvec(-half_width, -half_height, -1.0);
_horizontal = rtvec( * half_width, ., .);
_vertical = rtvec(., * half_height, .);
} inline const ray get_ray(const rtvar u,const rtvar v)const
{ return ray{ _eye, _start + u*_horizontal + v*_vertical }; } inline const ray get_ray(const lvgm::vec2<rtvar>& para)const
{ return ray{_eye, _start + para.u()*_horizontal + para.v()*_vertical}; } inline const rtvec& eye()const { return _eye; } inline const rtvec& start()const { return _start; } inline const rtvec& horizontal()const { return _horizontal; } inline const rtvec& vertical()const { return _vertical; } private:
rtvec _eye; rtvec _start; //left-bottom rtvec _horizontal; rtvec _vertical; }; } #endif
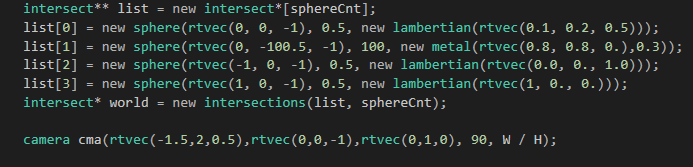
同时,我们如下设置main的相关数据,先来测试一下
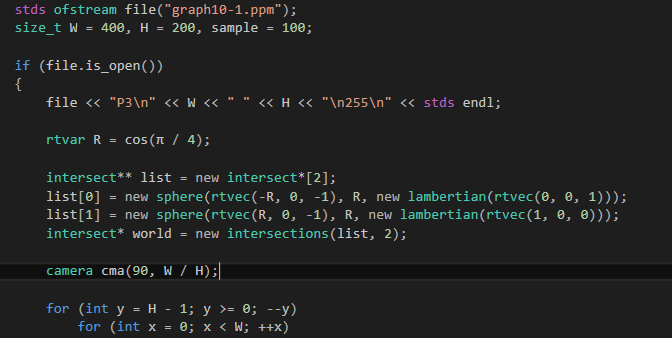
Lambertian(rtvec(0,0,1))过滤red和green,完全保留blue
得到如下图: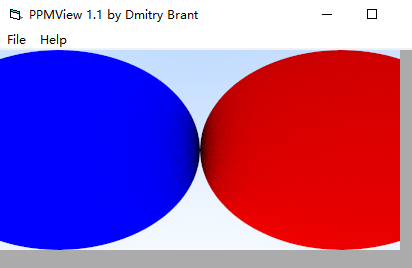
没问题吧,屏幕宽为4,高为2,两边少的部分是被视锥体切掉了
从原点往左右边界连线,左三角面和右三角面内的部分才可见

3.lookfrom:相机所在位置
4.lookat:相机视线指向的位置点
相机在lookfrom位置看向lookat点
5.相机平面
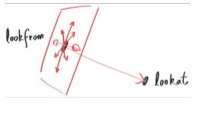
相机平面是过lookfrom垂直于视线(from->at)的一个平面
类似于坐标系,确定平面当然也需要正交基向量,而相机三维正交基一般采用uvw坐标系
一个个描述
在阐述uvw之前先确定一个正向上的向量,因为相机坐标系算是一个局部性质的,当我们把它放在世界坐标系中,就需要用一个始终指向世界坐标系正上方的基向量vup(view up)
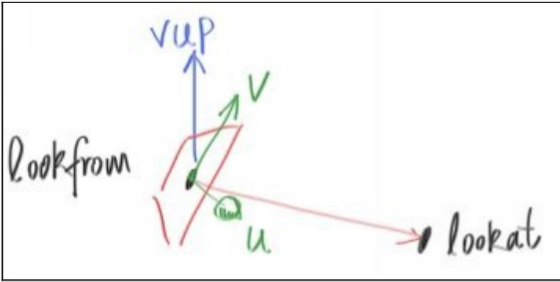
我们现在来确定三维正交相机坐标系
我们先来确定w,w是一个正交于相机平面的基向量
它的定义为 w = lookfrom - lookat
即:与视线反向的一个基向量
有了w,我们便可以定义u了,u向量代表相机平面的水平向量
u一定平行于世界坐标系的x轴
vup平行于世界坐标系的y轴
所以u⊥vup
而w⊥相机平面,所以w⊥u
所以 u = vup × w 该体系为右手系
最后定义v,v就是相机平面的垂直方向
即, v = w × u
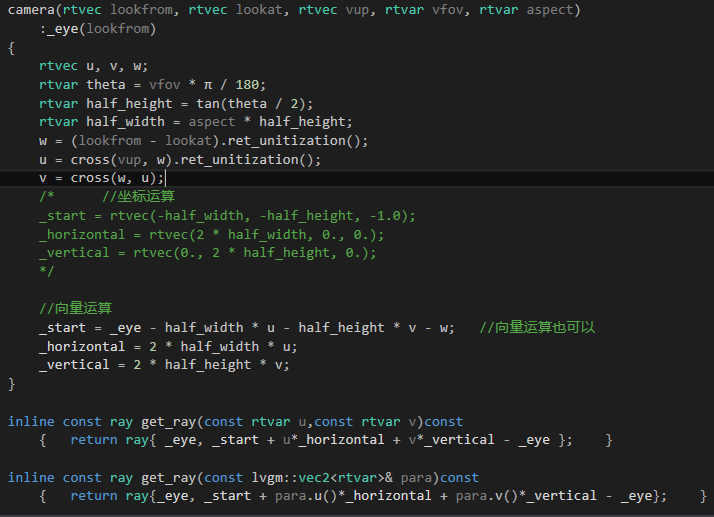
所以,我们可以定义一个完整的camera类啦
构造函数改动如下:
我们试着,站在(-2,2,1)位置,往屏幕中心(0,0,-1)看
它应该是一张俯瞰图
主函数:
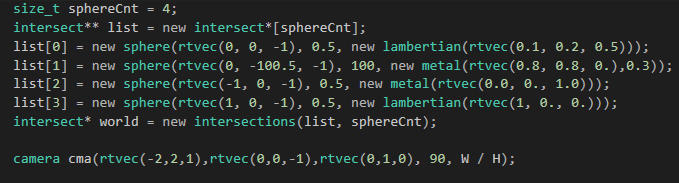
如图:
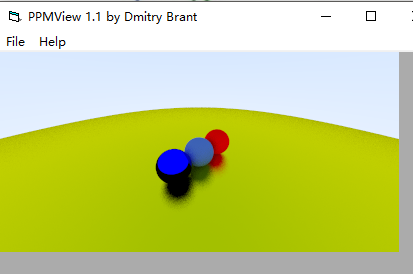
左边的金属球只反射光蓝色分量,右边的漫反射球只反射光的红色分量
至于蓝色的金属球下部是黑色的,只能解释为下部的反射光中蓝色成分比较少
所以,过了这一节,我们的镜头就可以远近上下左右调整了,屏幕也随时跟着相机动,为相机影像做投影
是不是非常激动
前面那张效果图是如下设置的,球的性质改了一下,且把相机拉近了些(感觉书上的距离太远了)
感谢您的阅读,生活愉快~
【Ray Tracing in One Weekend 超详解】 光线追踪1-8 自定义相机设计的更多相关文章
- 【Ray Tracing The Next Week 超详解】 光线追踪2-9
我们来整理一下项目的代码 目录 ----include --hit --texture --material ----RTdef.hpp ----ray.hpp ----camera.hpp ---- ...
- 【Ray Tracing The Next Week 超详解】 光线追踪2-6 Cornell box
Chapter 6:Rectangles and Lights 今天,我们来学习长方形区域光照 先看效果 light 首先我们需要设计一个发光的材质 /// light.hpp // ------- ...
- 【Ray Tracing in One Weekend 超详解】 光线追踪1-4
我们上一篇写了Chapter5 的第一个部分表面法线,那么我们来学剩下的部分,以及Chapter6. Chapter5:Surface normals and multiple objects. 我们 ...
- 【Ray Tracing The Next Week 超详解】 光线追踪2-7 任意长方体 && 场景案例
上一篇比较简单,很久才发是因为做了一些好玩的场景,后来发现这一章是专门写场景例子的,所以就安排到了这一篇 Preface 这一篇要介绍的内容有: 1. 自己做的光照例子 2. Cornell box画 ...
- 【Ray Tracing The Next Week 超详解】 光线追踪2-8 Volume
Preface 今天有两个东东,一个是体积烟雾,一个是封面图 下一篇我们总结项目代码 Chapter 8:Volumes 我们需要为我们的光线追踪器添加新的物体——烟.雾,也称为participat ...
- 【Ray Tracing The Next Week 超详解】 光线追踪2-5
Chapter 5:Image Texture Mapping 先看效果: 我们之前的纹理是利用的是撞击点p处的位置信息,比如大理石纹理 而我们今天的图片映射纹理采用2D(u,v)纹理坐标来进行. 在 ...
- 【Ray Tracing The Next Week 超详解】 光线追踪2-4 Perlin noise
Preface 为了得到更好的纹理,很多人采用各种形式的柏林噪声(该命名来自于发明人 Ken Perlin) 柏林噪声是一种比较模糊的白噪声的东西:(引用书中一张图) 柏林噪声是用来生成一些看似杂乱 ...
- 【Ray Tracing The Next Week 超详解】 光线追踪2-3
Preface 终于到了激动人心的纹理章节了 然鹅,看了下,并不激动 因为我们之前就接触过 当初有一个 attenuation 吗? 对了,这就是我们的rgb分量过滤器,我们画出的红色.蓝色.绿色等 ...
- 【Ray Tracing The Next Week 超详解】 光线追踪2-2
Chapter 2:Bounding Volume Hierarchies 今天我们来讲层次包围盒,乍一看比较难,篇幅也多,但是咱们一步一步来,相信大家应该都能听懂 BVH 和 Perlin text ...
随机推荐
- Activiti学习——Activiti与Spring集成
转: Activiti学习——Activiti与Spring集成 与Spring集成 基础准备 目录结构 相关jar包 Activiti的相关jar包 Activiti依赖的相关jar包 Spring ...
- UML类图学习笔记
http://note.youdao.com/noteshare?id=d5af220db7081dda73511fcb7b4da390
- python爬虫 scrapy1-安装及创建第一个项目
sklearn实战-乳腺癌细胞数据挖掘(博主亲自录制视频) https://study.163.com/course/introduction.htm?courseId=1005269003& ...
- Python常用模块-时间模块(time&datetime)
Python常用模块-时间模块(time & datetime) 作者:尹正杰 版权声明:原创作品,谢绝转载!否则将追究法律责任. 一.初始time模块 #!/usr/bin/env pyth ...
- bzoj千题计划222:bzoj2329: [HNOI2011]括号修复(fhq treap)
http://www.lydsy.com/JudgeOnline/problem.php?id=2329 需要改变的括号序列一定长这样 :)))((( 最少改变次数= 多余的‘)’/2 [上取整] + ...
- 从零开始写一个武侠冒险游戏-0-开发框架Codea简介
从零开始写一个武侠冒险游戏-0-开发框架Codea简介 作者:FreeBlues 修订记录 2016.06.21 初稿完成. 2016.08.03 增加对 XCode 项目文件的说明. 概述 本游戏全 ...
- 2018年10月14日ICPC南京站参赛总结
这次比赛消耗掉了我们全部的信心和精力 在热身赛上,总体来说还是比较愉快的,这个时候心态就不对 正赛的时候我们遇到了A题签到题 我一开始是读错了题意了,认为这个题是一个裸的SG函数,而且那么多人秒过 W ...
- BFS简单题套路_Codevs 1215 迷宫
BFS 简单题套路 1. 遇到迷宫之类的简单题,有什么行走方向的,先写下面的 声明 ; struct Status { int r, c; Status(, ) : r(r), c(c) {} // ...
- ngx_lua_API 指令详解(四)ngx.exec指令
https://github.com/openresty/lua-nginx-module#ngxexec 参照:http://blog.csdn.net/weiyuefei/article/deta ...
- git 学习小记之记住https方式推送密码
昨天刚刚学了点git基础操作,但是不幸的是Git@OSC给出公告说尽量使用 https 进行操作.可是在用 https 进行 push 时,都需要输入帐号和密码. 各种百度谷歌之后在Git@OSC官网 ...