Matlab2015 双目相机自动标定
标定步骤
调出标定工具箱
在命令行输入stereoCameraCalibrator,出现如下界面:
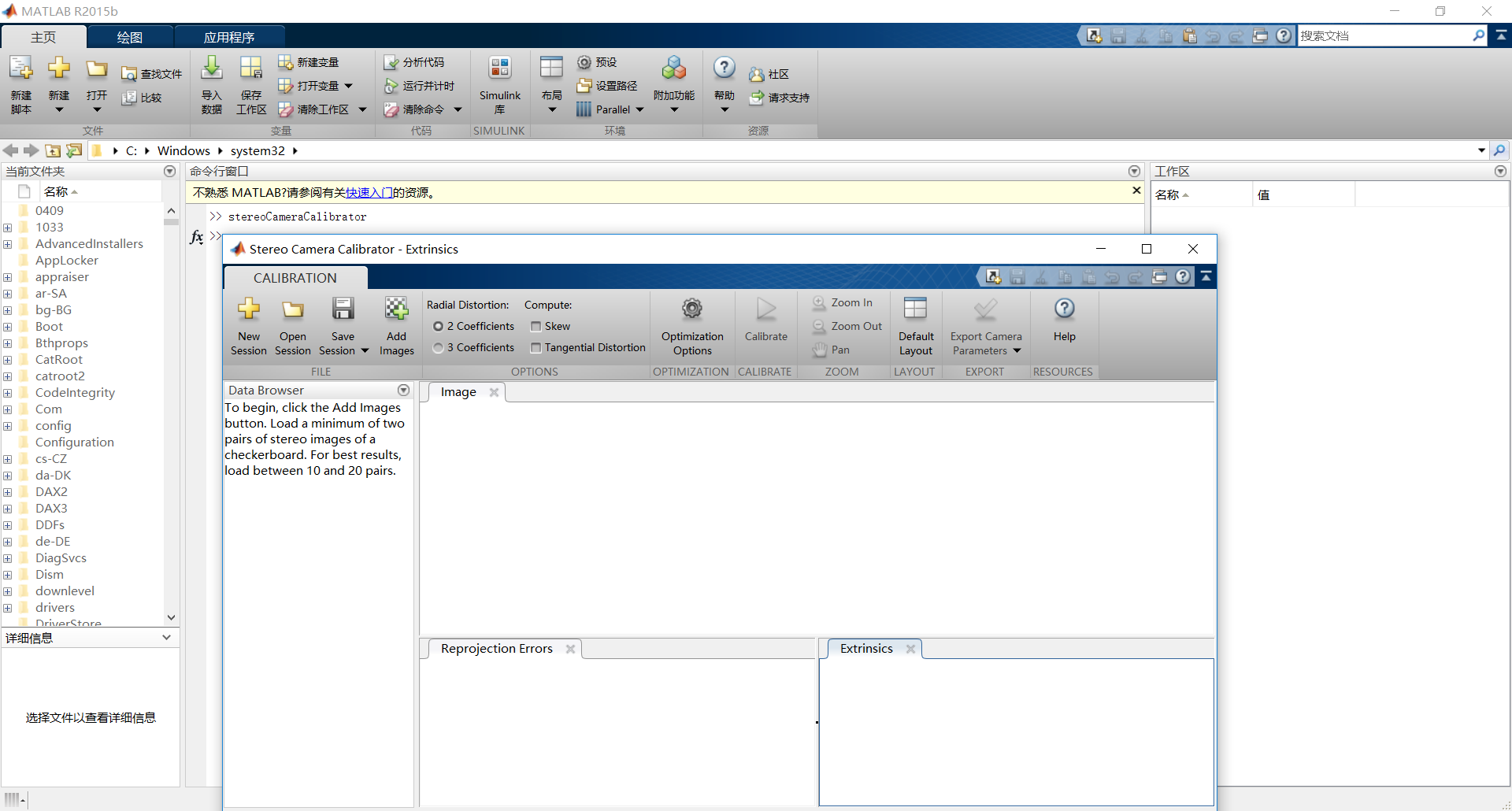
勾选相应的选项
然后将上面的“Skew”、“Tangential Distortion”以及“3 Coefficients”等选项选上,将“2 Coefficients”选项去掉,如下:

载入图像
然后点击添加图像,出现如下界面:

Camera1代表左摄像头,Camera2代表右摄像头,分别选择存放着左右图像的文件夹,需要特别注意的是棋盘格的边长应该根据打印的实际大小填写,单位可以选择
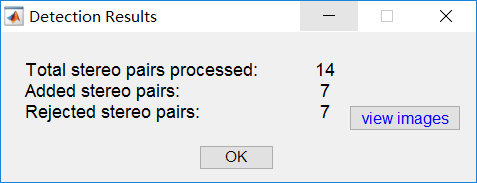
然后点击OK,程序会自动检测采集的图像到底有多少可以使用,可以说MATLAB2015的这个工具十分挑剔,如果角度不好的话,将使用不了,因此在采集图像时,最好多的采集一些。(此处只是为了说明标定步骤,所以使用的图像较少)。
标定
点击 按钮,开始标定:
按钮,开始标定:

校准
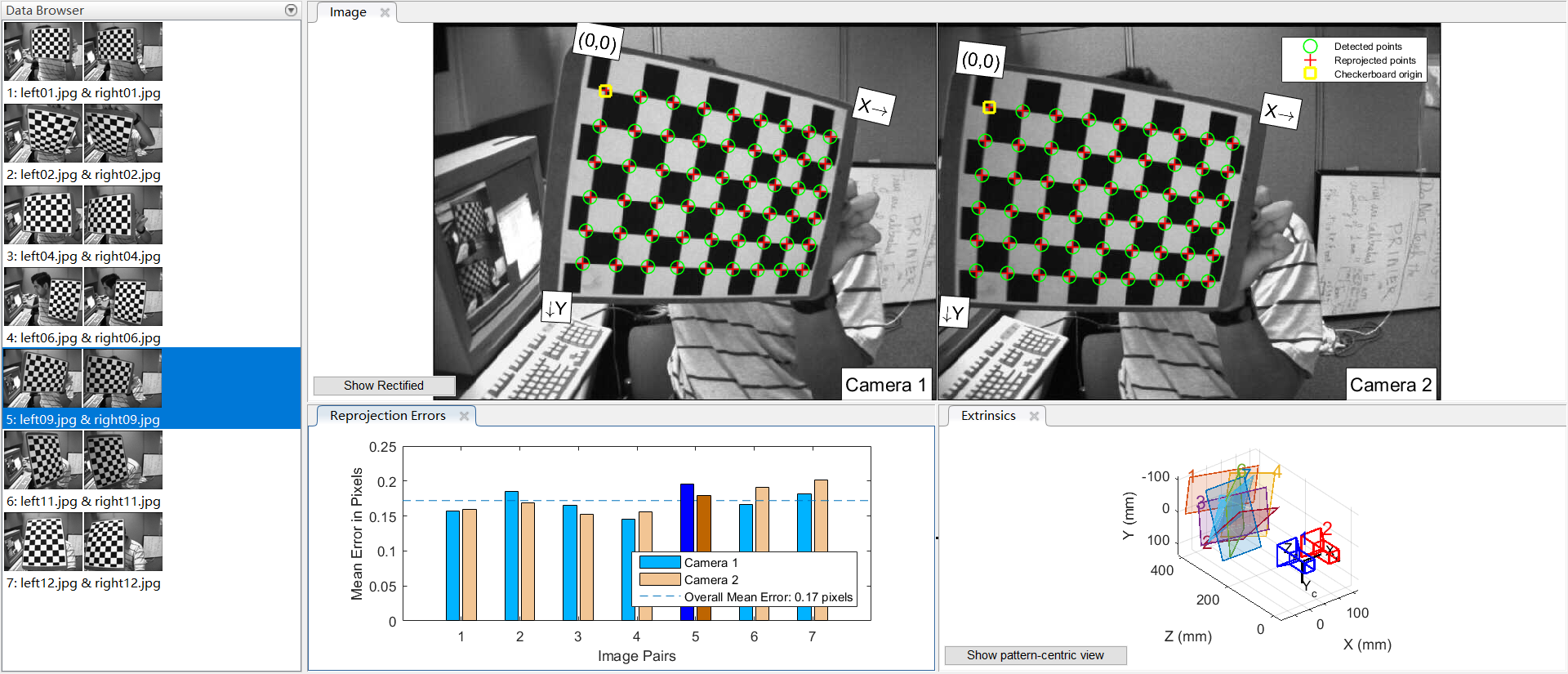
从下图可以看到,平均的标定误差以及标定过程中误差较大的的图像对。
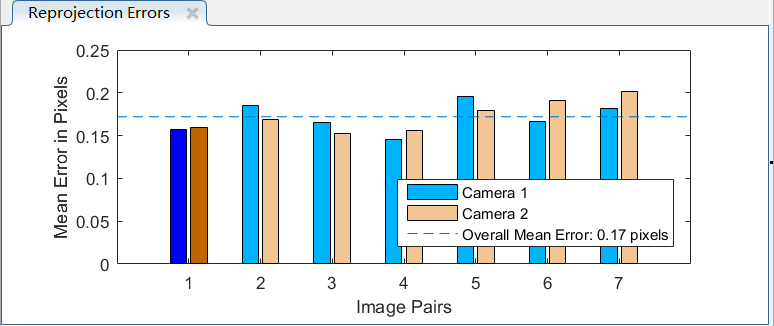
点击选择不想接受的误差直方图,可以直接在左边的图像对中找到对应的图像,右键选择“Remove and Recalibrate”:
可以重复上述步骤,直到认为误差满足标定需求为止。
导出参数
点击 选择Export camera parameters, 并点击“OK”。
选择Export camera parameters, 并点击“OK”。
参数读取
标定结束后,会得到如下标定参数:

CameraParameters1与CameraParameters2为左右摄像头的单独标定参数。
两个摄像头的平移和旋转参数
stereoParams.TranslationOfCamera2:相机2相对于相机1的偏移矩阵,可以直接使用。
stereoParams.RotationOfCamera2:相机2相对于相机1的旋转矩阵,需要转置之后才能使用。
摄像机内参矩阵
CameraParameters1与CameraParameters2中包含如下文件:
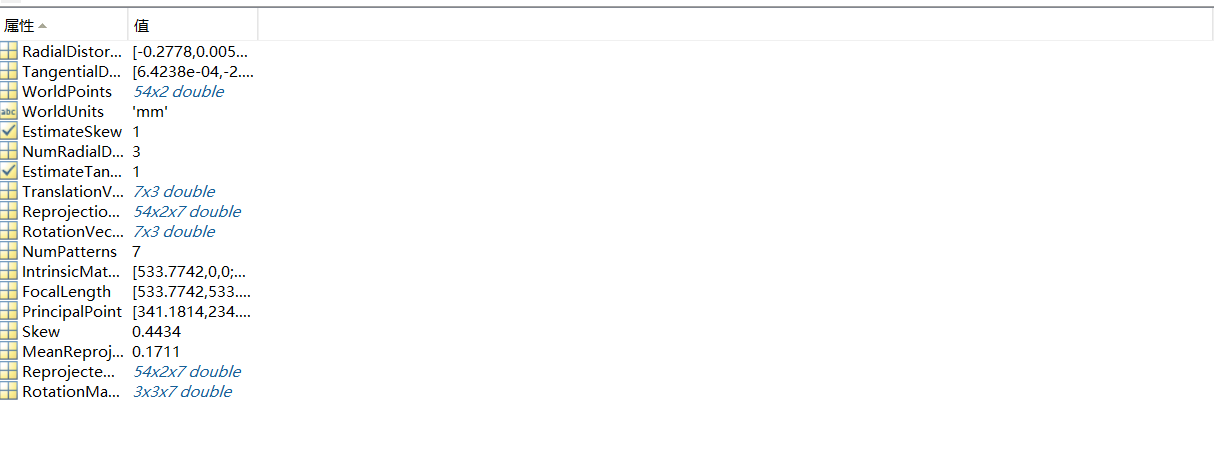
IntrinsicMatrix存放的是摄像头的内参,只与摄像机的内部结构有关,需要先转置再使用。
畸变参数
RadialDistortion:径向畸变,摄像头由于光学透镜的特性使得成像存在着径向畸变,可由K1,K2,K3确定。
TangentialDistortion:切向畸变,由于装配方面的误差,传感器与光学镜头之间并非完全平行,因此成像存在切向畸变,可由两个参数P1,P2确定。
使用时,需要注意参数的排放顺序,即K1,K2,P1,P2,K3。切记不可弄错,否则后续的立体匹配会出现很大的偏差。
Matlab2015 双目相机自动标定的更多相关文章
- Autoware 进行 Robosense-16 线雷达与 ZED 双目相机联合标定!
项目要标定雷达和相机,这里记录下我标定过程,用的速腾 Robosense - 16 线雷达和 ZED 双目相机. 一.编译安装 Autoware-1.10.0 我没有安装最新版本的 Autoware, ...
- 双目相机标定以及立体测距原理及OpenCV实现
单目相机标定的目标是获取相机的内参和外参,内参(1/dx,1/dy,Cx,Cy,f)表征了相机的内部结构参数,外参是相机的旋转矩阵R和平移向量t.内参中dx和dy是相机单个感光单元芯片的长度和宽度,是 ...
- 干货 | LIDAR、ToF相机、双目相机如何科学选择?
点击"计算机视觉life"关注,置顶更快接收消息! 本文阅读时间约5分钟 本文翻译自卡内基梅隆大学 Chris asteroid 三维视觉技术的选择 传感器参数及定义 LIDAR ...
- 基于USB3.0的双目相机测试小结之CC1605配合CS5642 双目 500w摄像头
基于USB3.0的双目相机测试小结之CC1605配合CS5642 双目 500w摄像头 CC1605双目相机评估板可以配合使用柴草电子绝大多数摄像头应用 如:OV5640.OV5642.MT9P03 ...
- CC1605&CC1604 usb3.0+FPGA 高速视频采集 双目相机测评
CC1605&CC1604 usb3.0+FPGA 高速视频采集 双目相机测评 摄像头配置:ov5640.OV5642.mt9p031.mt9m001c12stm OV5640 xclk:24 ...
- Halocn双目相机标定
[Halcon]Halcon双目标定 相机标定(4)---基于halcon的双目立体视觉标定 双目立体视觉:四(双目标定matlab,图像校正,图像匹配,计算视差,disparity详解,) 双目测距 ...
- 关于udo3d双目相机的嵌入式板子系统重装
遇到的问题: 1.下载压缩文件(.rar):在linux下下载一会就会停止 原因:linux下不支持.rar文件的下载,在windows下载即可 2.在windows下解压文件,结果为镜像文件(.im ...
- USB3.0之高速视频传输测试 双目相机(mt9p031、mt9m001)带宽高达300M测试 配合isensor测试 500万像素15fps
最近完善了下USB3.0的视频开发测试,主要优化了FPGA程序和固件,及其同步方式.对带宽和图像效果进行了仔细的测试 开发板架构(2CMOS+FPGA+2DDR2+USB3.0) 评估板底板配合2个M ...
- 相机标定问题-Matlab & Py-Opencv
一.相机标定基本理论 1.相机成像系统介绍 图中总共有4个坐标系: 图像坐标系:Op 坐标表示方法(u,v) Unit:Dots(个) 成像坐标系:Oi ...
随机推荐
- Django的admin使用
现在假设我们自己定义了一个用户模型和成员模型,我们需要在Django后台对它进行管理,使用admin可以对模型进行相关的展示设置和管理. from django.contrib import admi ...
- Android访问中央气象台的天气预报API得到天气数据
最新说明:该接口已失效! 2014-03-04 可申请它公布的API,需申请:http://smart.weather.com.cn/wzfw/smart/weatherapi.shtml 在用A ...
- Animation组件
[Animation组件] Animation是Unity3D中老的动画组件,从4.x起已全面被MecAnim中的Animator组建所替代.但是4.x仍保留了Animation组件,所以了解此组件还 ...
- ThinkPHP3.2 插入数据库数据,缓存问题
每个字段都是有数据的,可是就是is_new插不进去, 最后的原因就是TP有数据库字段缓存,FUCK 把RunTIme下面的Data文件夹删除掉,在开发模式中就把自动缓存改成Fasle
- c++ 桥接模式(bridge)
桥接模式的目的是分离抽象实现部分,把数据和实现分开,降低耦合.桥接模式和适配器模式不同之处是,桥接模式一般会在软件设计初考虑使用,适配器模式在软件设计之后为了实现接口兼容时使用. 下面是系统和电脑之间 ...
- jQuery div鼠标移动效果
<head runat="server"> <meta http-equiv="Content-Type" content="tex ...
- Rails 和 Django 的深度技术对比
我想以一个免责声明来开始下面的内容.我使用 Django开发网站已经有三年了,众所周知,我喜欢Django.我已经写了一个开源的应用程序( app),并且我已经将补丁发送到了Django.然而,我以尽 ...
- Ubuntu 查看软件版本
Boost dpkg -S /usr/include/boost/version.hpp OpenCV pkg-config --modversion opencv
- Apr编程
一.简介 http://www.xuebuyuan.com/2195578.html 二.教程 http://dev.ariel-networks.com/apr/
- CLR 显示实现事件 EventSet内部管理一个字典
using System; using System.Collections; using System.Collections.Generic; using System.Linq; using S ...