第二章节 BJROBOT IMU 自动校正 【ROS全开源阿克曼转向智能网联无人驾驶车】
1、把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch 。
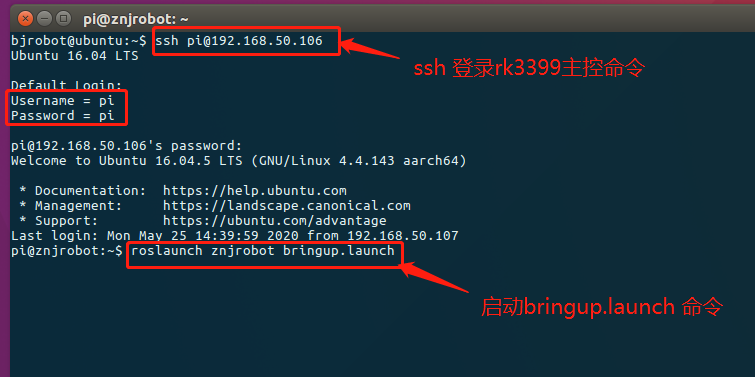
2、再打开一个终端,ssh 过去主控端,在
~/catkin_ws/src/znjrobot_project/znjrobot/param/imu 路径下启动 imu 校正命令。rosrun imu_calib do_calib

3、按提示输入回车即可完成校正。
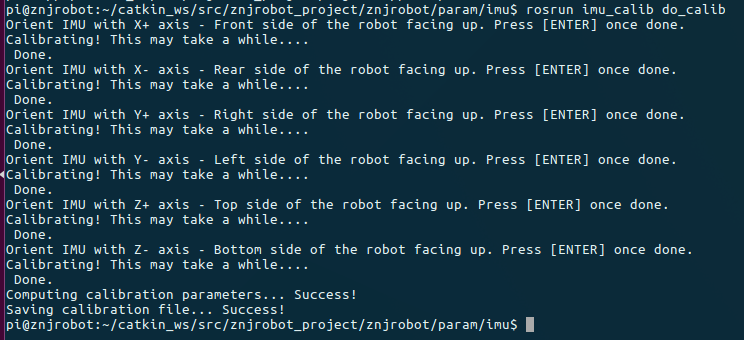
切记:运行imu自动校正,一定要先跳转到~/catkin_ws/src/znjrobot_project/znjrobot/param/imu目录下运行命令;
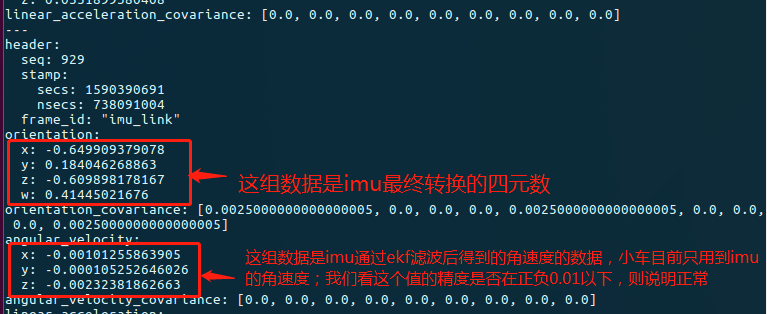
4、校准完成后,测试验证IMU参数是否准确:
需要重新启动bringup文件,让系统重新加载校准后的参数,也就是要关闭以前执行的roslaunch znjrobot bringup.launch命令(tips:Ctrl+C可以关掉当前终端的应用);
再重新开一个终端,执行查看imu话题的命令,执行rostoipc echo /imu/data命令就会出现校准后的IMU数值的界面,由于我们目前只用到IMU的角速度,因此我们看 角速度的的各项指标是不是正常就行:
第二章节 BJROBOT IMU 自动校正 【ROS全开源阿克曼转向智能网联无人驾驶车】的更多相关文章
- 第九章节 BJROBOT 多点导航【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch. 2.再打开一个终端,ssh 过去主控端启动 rosl ...
- 第13章节 BJROBOT 雷达跟随【ROS全开源阿克曼转向智能网联无人驾驶车】
雷达跟随说明:注意深度摄像头的 USB 延长线,可能会对雷达扫描造成影响, 所以在雷达跟随前,把深度摄像头的 USB 延长线取下.另外雷达跟随范围大概是前方 50cm 和 120°内扫描到的物体都可以 ...
- 第十一章节 BJROBOT PS3 手柄控制【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车架空平放在地板上. 2.用 USB 线将 PS3 蓝牙手柄连接至小车主控端,初次连接手柄上的 4 个红色指示灯会同时闪烁; 3.按下手柄中间的圆形配对键,然后等待红灯闪烁至停止. 4.此 ...
- 第一章节 BJROBOT ROS 网络配置及移动控制【ROS全开源阿克曼转向智能网联无人驾驶车】
版权声明:该教程版权归北京智能佳科技有限公司所有,未经公司授权禁止引用.发布.转载等,否则将追究其法律责任. 使用前说明:本使用文档说明略微简明,请结合指导视频进行操作会更容易理解!! 第一章节 BJ ...
- 第三章节 BJROBOT 角速度校正 【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch . 2.再打开一个终端 ssh 过去主控端,启动校 ...
- 第四章节 BJROBOT 线速度校正 【ROS全开源阿克曼转向智能网联无人驾驶车】
BJROBOT 线速度校正 1.把小车平放在地板上,用卷尺作为测量刻度,选取车头或者车尾处作为小车的起点, 打开资料里的虚拟机,打开一个终端 ssh 过去主控端启动 roslaunch znjro ...
- 第十五章节 BJROBOT cartographer 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第14章节 BJROBOT karto 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第十九章节 BJROBOT 安卓手机 APP 导航【ROS全开源阿克曼转向智能网联无人驾驶车】
导航前说明:一定要确保你小车在构建好地图的基础上进行! 1.把小车平放在你想要构建地图区域的地板上,打开资料里的虚拟机,打开一个终端, ssh 过去主控端启动roslaunch znjrobot br ...
随机推荐
- Python中迭代循环使用比较多的range函数的作用
range函数用于生成一个不可变的数字序列可迭代对象,类型为range,该数字序列通常用于在 for 循环中循环指定的次数. 具体可参考:<Python中与迭代相关的函数>的详细介绍 老猿 ...
- tcp socket学习
更新一波学的socket编程,socket还是比较重要的,探测端口,连接服务底层都是socket编程.tcp有server 和 client.client和udp发送差不多. server端是建立了两 ...
- js- 判断属性是否 属于该对象 hasOwnProperty()
var obj ={ name:'suan', sex :'male', age:150, height:185, characeter:true, _proto_:{ lastName:'susan ...
- csv文件的写操作
import csv sumbmit_csv_path = "submit_have_valid_SGD.csv" with open(sumbmit_csv_path, &quo ...
- Scrum 冲刺第三天
一.每日站立式会议 1.会议内容 1)进行每日工作汇报 张博愉: 昨天已完成的工作:博客编写.spring boot学习 今日工作计划:将项目代码更新到最新版本 工作中遇到的困难:各成员的环境不一样, ...
- CentOS 用户请关注,你期待的 CentOS Linux 9 再也不会来了
2020年12月晚上红帽官网发布了一条公告,宣布了几件事情: 将不会发行 CentOS Linux 9 CentOS Linux 8 的更新支持持续到2021年12月31日 CentOS Linux ...
- 【CSP-S 2019】树的重心(重心的性质)
Description 给定一颗 \(n\) 个顶点的树 \(\text T\),共 \(n-1\) 次断边操作,每次将树分为两部分 \(\text T_1, \text T_2\),求: \[\su ...
- c++笔试题3
一.[阿里C++面试题]1.如何初始化一个指针数组.答案: 错题解析:首先明确一个概念,就是指向数组的指针,和存放指针的数组. 指向数组的指针:char (*array)[5];含义是一个指向存放5个 ...
- js v-if 判断多个属性 in
js v-if 判断 <div v-if="suborder.approve_user==user_id || suborder.approve_userrole_id in rol ...
- base64 基本使用 和os模块使用
1 base64 的基本使用 import base64 with open('../static/upload/63bc620d1594779d6a98c53a3a8db1e5.png','rb' ...