Linux 驱动框架---input子系统框架
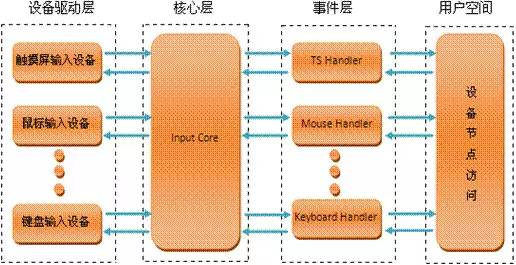
前面从具体(Linux 驱动框架---input子系统)的工作过程学习了Linux的input子系统相关的架构知识,但是前面的学习比较实际缺少总结,所以今天就来总结一下输入子系统的架构分层,站到远处来看输入子系统。总得来说输入子系统由设备驱动层(input_dev的注册),输入子系统核心层(input core),事件处理层(handler),和用户空间四部分。这一部分类别platform驱动框架的内容来学习。
设备驱动层(类似于platform_device)
就是前面描述的gpio_keys.c 中的probe接口中的处理过程主要负责不同硬件的底层相关的中断,IO等具体硬件相关的配置和对应接口的开发,并负责将不同硬件设备的数据转换为统一的事件,
通过子系统提供的API接口向输入核心汇报。
输入核心参(类似platform_bus)
承上启下的作用上到用户空间的lient,同时提供设备注册和事件层注册并负责设备和事件层的匹配,同时负责通知事件层处理事件,并在、proc等目录下产生相应的信息文件接口。
事件层(platform_drivers)
负责对设备上报的事件进行处理,中间还引入了input_client的概念,input设备的时间层负责上对接用户空间下对接输入核心层,一个输入设备每次被打开依次设备驱动驱动层就会创建一个client,
事件处理层就负责将设备上报的事件放到每个client然后由用户读写。
中间链接件
输入子系统的几个部分其中的input_dev(输入设备)和input_handler(事件处理层),当他们俩任何一个新注册进子系统时由子系统核心进行匹配,如果匹配成功将创建一个handle用来绑定dev和handler
这里要注意区分handler和handle 这两个太像了。
总体用一个图片来表示就是:
参考:https://www.sohu.com/a/128794317_610671
再来看一点输入子系统core的相关内容----事件和事件map等相关的宏的含义及设置方法。
事件省略了一些内容:
struct input_dev {
unsigned long propbit[BITS_TO_LONGS(INPUT_PROP_CNT)];
unsigned long evbit[BITS_TO_LONGS(EV_CNT)];
unsigned long keybit[BITS_TO_LONGS(KEY_CNT)];
unsigned long relbit[BITS_TO_LONGS(REL_CNT)];
unsigned long absbit[BITS_TO_LONGS(ABS_CNT)];
unsigned long mscbit[BITS_TO_LONGS(MSC_CNT)];
unsigned long ledbit[BITS_TO_LONGS(LED_CNT)];
unsigned long sndbit[BITS_TO_LONGS(SND_CNT)];
unsigned long ffbit[BITS_TO_LONGS(FF_CNT)];
unsigned long swbit[BITS_TO_LONGS(SW_CNT)];
。
。
。
};
具体是怎么描述的设备的的可以从如下接口“可见一斑”:
void input_set_capability(struct input_dev *dev, unsigned int type, unsigned int code)
{
switch (type) {
case EV_KEY:
__set_bit(code, dev->keybit);
break; case EV_REL:
__set_bit(code, dev->relbit);
break; case EV_ABS:
input_alloc_absinfo(dev);
if (!dev->absinfo)
return; __set_bit(code, dev->absbit);
break; case EV_MSC:
__set_bit(code, dev->mscbit);
break; case EV_SW:
__set_bit(code, dev->swbit);
break; case EV_LED:
__set_bit(code, dev->ledbit);
break; case EV_SND:
__set_bit(code, dev->sndbit);
break; case EV_FF:
__set_bit(code, dev->ffbit);
break; case EV_PWR:
/* do nothing */
break; default:
pr_err("input_set_capability: unknown type %u (code %u)\n",
type, code);
dump_stack();
return;
} __set_bit(type, dev->evbit);
}
可以从输入设备的结构体定义内容看到,输入系统共支持的输入类型有事件设备,按键设备,相对坐标,,,,声音控制,,开关等类型事件。也可以从头文件中的定义看到
#define EV_SYN 0x00 //同步事件
#define EV_KEY 0x01 //按键事件
#define EV_REL 0x02 //相对坐标
#define EV_ABS 0x03 //绝对坐标
#define EV_MSC 0x04 //杂项事件
#define EV_SW 0x05 //开关类型事件
#define EV_LED 0x11 //led展示事件(如键盘状态灯)
#define EV_SND 0x12 //声音事件
#define EV_REP 0x14 //重复事件
#define EV_FF 0x15 //力反馈事件
#define EV_PWR 0x16 //电源事件 好像从接口看暂时不支持
#define EV_FF_STATUS 0x17
#define EV_MAX 0x1f
#define EV_CNT (EV_MAX+1)
/*所以通过上面的接口我盟知道设备支持的时间类型是由evbit位图来标记的,对于具体设备的code则有具体的设备类型的位图来记录。比如前面的gpio_key调用传入的事件类型是按键,而code就是具体按键的键值这个有设备平台信息携带。接下来看一下常见类型的code首先是容易理解的按键当然code就是键值如下不完全列出也不详细解释具体含义。*/ #define KEY_ESC 1
#define KEY_1 2
#define KEY_2 3
#define KEY_3 4
#define KEY_4 5
#define KEY_5 6
。
。
。
//相对坐标
#define REL_X 0x00 //这个代表x轴位移
#define REL_Y 0x01 //这个代表y轴位移
#define REL_Z 0x02 //代表z轴位移
#define REL_RX 0x03 //也是一种轴吧
#define REL_RY 0x04
#define REL_RZ 0x05
#define REL_HWHEEL 0x06
#define REL_DIAL 0x07
#define REL_WHEEL 0x08
#define REL_MISC 0x09 //绝对坐标,具体含义基本可以通过名字看出来也不完全列出来
#define ABS_X 0x00
#define ABS_Y 0x01
#define ABS_Z 0x02
#define ABS_RX 0x03
#define ABS_RY 0x04
#define ABS_RZ 0x05
#define ABS_THROTTLE 0x06
#define ABS_RUDDER 0x07
#define ABS_WHEEL 0x08
#define ABS_GAS 0x09
#define ABS_BRAKE 0x0a
#define ABS_HAT0X 0x10
//其余的还有开关类的,杂项类,LED的等,同时设备的总线输入子系统也定义了就如下几种类型
#define BUS_PCI 0x01
#define BUS_ISAPNP 0x02
#define BUS_USB 0x03
#define BUS_HIL 0x04
#define BUS_BLUETOOTH 0x05
#define BUS_VIRTUAL 0x06 #define BUS_ISA 0x10
#define BUS_I8042 0x11
#define BUS_XTKBD 0x12
#define BUS_RS232 0x13
#define BUS_GAMEPORT 0x14
#define BUS_PARPORT 0x15
#define BUS_AMIGA 0x16
#define BUS_ADB 0x17
#define BUS_I2C 0x18
#define BUS_HOST 0x19
#define BUS_GSC 0x1A
#define BUS_ATARI 0x1B
#define BUS_SPI 0x1C
最后再来看一下输入子系统上报的事件的封装结构体,这结构体定义在\include\uapi\linux\input.h 说明用户也是可以使用上面这些内容和定义的如事件
struct input_event {
struct timeval time;
__u16 type;
__u16 code;
__s32 value;
};
其中type和code就是前面提及的时间类型和code最后的value就是事件的具体值,到这里输入子系统的相关内容就算基本结束了,很多细节没有去仔细的看还是我自己的习惯
学习时关注重点粗线条,使用中熟悉细节。
Linux 驱动框架---input子系统框架的更多相关文章
- 【Linux高级驱动】input子系统框架【转】
转自:http://www.cnblogs.com/lcw/p/3802617.html [1.input子系统框架(drivers\input)] 如何得出某个驱动所遵循的框架? 1) 通过网 ...
- 【Linux高级驱动】input子系统框架
[1.input子系统框架(drivers\input)] 如何得出某个驱动所遵循的框架? 1) 通过网络搜索 2) 自己想办法跟内核代码! 2.1 定位此驱动是属于哪种类 ...
- Linux 驱动框架---input子系统
input 子系统也是作为内核的一个字符设备模块存在的,所以他也是字符设备自然也会有字符设备的文件接口.input子系统的注册过程主要分为两步,先注册了一个input class然后再注册一个字符设备 ...
- 【驱动】input子系统全面分析
初识linux输入子系统 linux输入子系统(linux input subsystem)从上到下由三层实现,分别为:输入子系统事件处理层(EventHandler).输入子系统核心层(InputC ...
- input子系统框架
废话不多说,直接进入主题.在驱动insmod后,我们应用层对input设备如何操作?以下以全志a64为实例. 在/dev/input/eventX下(X的形成为后续会分析),是内核把接口暴露给应用层, ...
- 【驱动】input子系统整体流程全面分析(触摸屏驱动为例)【转】
转自:http://www.cnblogs.com/lcw/p/3294356.html input输入子系统整体流程 input子系统在内核中的实现,包括输入子系统(Input Core),事件处理 ...
- linux内核中有哪些子系统(框架)呢?
注意: 分析用的linux内核版本为5.1.3 1. RTC子系统 2. Remote Processor子系统 3. Remote Processor Message子系统 4. SCSI子系统 5 ...
- linux驱动模型<输入子系统>
在linux中提供一种输入子系统的驱动模型,其主要是实现在input.c中. 在输入子系统这套模型中,他把驱动分层分类.首先分为上下两层,上层为input.c .下层为驱动的实现,下层分为两部分,一部 ...
- Linux驱动之输入子系统简析
输入子系统由驱动层.输入子系统核心.事件处理层三部分组成.一个输入事件,如鼠标移动.键盘按下等通过Driver->Inputcore->Event handler->userspac ...
随机推荐
- Vue使用Ref跨层级获取组件实例
目录 Vue使用Ref跨层级获取组件实例 示例介绍 文档目录结构 安装vue-ref 根组件自定义方法[使用provide和inject] 分别说明各个页面 结果 Vue使用Ref跨层级获取组件实例 ...
- CMU数据库(15-445)-实验2-B+树索引实现(中)删除
3. Delete 实现 附上实验2的第一部分 https://www.cnblogs.com/JayL-zxl/p/14324297.html 3. 1 删除算法原理 如果叶子结点中没有相应的key ...
- JVM(五)手动解析.class文件
一:不同进制之间的转换 二进制:逢2进1,数字0-1. 八进制:逢8进1,数字0-7.三位二进制表示一位八进制.三位二进制最大为111,最大为7. 十进制:逢10进1,数字0-9.四位二进制表示一位十 ...
- Java并发组件二之CyclicBarriar
使用场景: 多个线程相互等待,直到都满足条件之后,才能执行后续的操作.CyclicBarrier描述的是各个线程之间相互等待的关系. 使用步骤: 正常实例化:CyclicBarrier sCyclic ...
- Xamarin.Forms: 无限滚动的ListView(懒加载方式)
说明 在本博客中,学习如何在Xamarin.Forms应用程序中设计一个可扩展的无限滚动的ListView.这个无限滚动函数在默认的Xamarin.Forms不存在,因此我们需要为此添加插件.在这里我 ...
- Kubernetes TensorFlow 默认 特定 集群管理器 虚拟化技术
Our goal is to foster an ecosystem of components and tools that relieve the burden of running applic ...
- 网页小实验——用canvas生成精灵动画图片
实验目标:借助canvas把一张国际象棋棋子图片转换为一组适用于WebGL渲染的精灵动画图片,不借助其他图片处理工具,不引用其他库只使用原生js实现. 初始图片如下: 一.图片分割 将初始图片分割为六 ...
- hasOwnProperty和 ... in ...的区别
hasOwnProperty() 方法会返回一个布尔值,指示对象自身属性中是否具有指定的属性(也就是,是否有指定的键).https://developer.mozilla.org/zh-CN/docs ...
- io流读写操作
/** * * DOC 将F盘下的test.jpg文件,读取后,再存到E盘下面. * * @param args * @throws Exception */ public static void m ...
- CPU中的程序是怎么运行起来的
总述 最近一位朋友问我,开发的代码是怎么在芯片运行起来的,我就开始给他介绍代码的预编译.汇编.编译.链接然后到一般的文件属性,再到代码运行.但是大佬问了我一句,CPU到底是怎么执行到每一个逻辑的,就讲 ...