python-opencv 图像二值化,自适应阈值处理
定义:图像的二值化,就是将图像上的像素点的灰度值设置为0或255,也就是将整个图像呈现出明显的只有黑和白的视觉效果。
一幅图像包括目标物体、背景还有噪声,要想从多值的数字图像中直接提取出目标物体,常用的方法就是设定一个阈值T,用T将图像的数据分成两部分:大于T的像素群和小于T的像素群。这是研究灰度变换的最特殊的方法,称为图像的二值化(Binarization)。
简单的阈值-(全局阈值):
Python-OpenCV中提供了阈值(threshold)函数:
cv2.threshold()
函数:第一个参数 src 指原图像,原图像应该是灰度图。
第二个参数 x 指用来对像素值进行分类的阈值。
第三个参数 y 指当像素值高于(有时是小于)阈值时应该被赋予的新的像素值
第四个参数 Methods 指,不同的不同的阈值方法,这些方法包括:
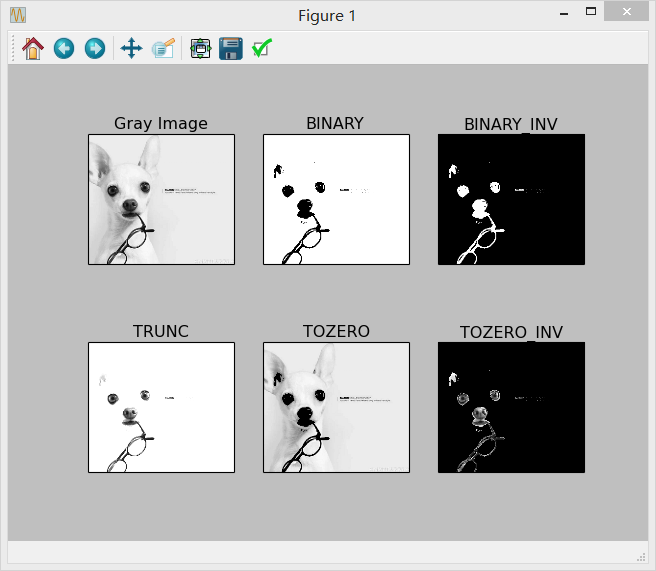
•cv2.THRESH_BINARY 图(1)
•cv2.THRESH_BINARY_INV 图(2)
•cv2.THRESH_TRUNC 图(3)
•cv2.THRESH_TOZERO 图(4)
•cv2.THRESH_TOZERO_INV 图(5)
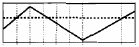
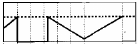
破折线为将被阈值化的值;虚线为阈值
图(1)
大于阈值的像素点的灰度值设定为最大值(如8位灰度值最大为255),灰度值小于阈值的像素点的灰度值设定为0。
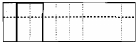
图(2)
大于阈值的像素点的灰度值设定为0,而小于该阈值的设定为255。
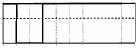
图(3)
像素点的灰度值小于阈值不改变,大于阈值的灰度值的像素点就设定为该阈值。
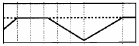
图(4)
像素点的灰度值小于该阈值的不进行任何改变,而大于该阈值的部分,其灰度值全部变为0。

图(5)
像素点的灰度值大于该阈值的不进行任何改变,像素点的灰度值小于该阈值的,其灰度值全部变为0。
Python+opencv代码:
import cv2
import numpy as np
from matplotlib import pyplot as plt
img = cv2.imread('1.bmp')
GrayImage=cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
# 中值滤波
GrayImage= cv2.medianBlur(GrayImage,)
ret,th1 = cv2.threshold(GrayImage,,,cv2.THRESH_BINARY)
# 为Block size, 5为param1值
th2 = cv2.adaptiveThreshold(GrayImage,,cv2.ADAPTIVE_THRESH_MEAN_C,\
cv2.THRESH_BINARY,,)
th3 = cv2.adaptiveThreshold(GrayImage,,cv2.ADAPTIVE_THRESH_GAUSSIAN_C,\
cv2.THRESH_BINARY,,)
titles = ['Gray Image', 'Global Thresholding (v = 127)',
'Adaptive Mean Thresholding', 'Adaptive Gaussian Thresholding']
images = [GrayImage, th1, th2, th3]
for i in xrange():
plt.subplot(,,i+),plt.imshow(images[i],'gray')
plt.title(titles[i])
plt.xticks([]),plt.yticks([])
plt.show()
效果图:
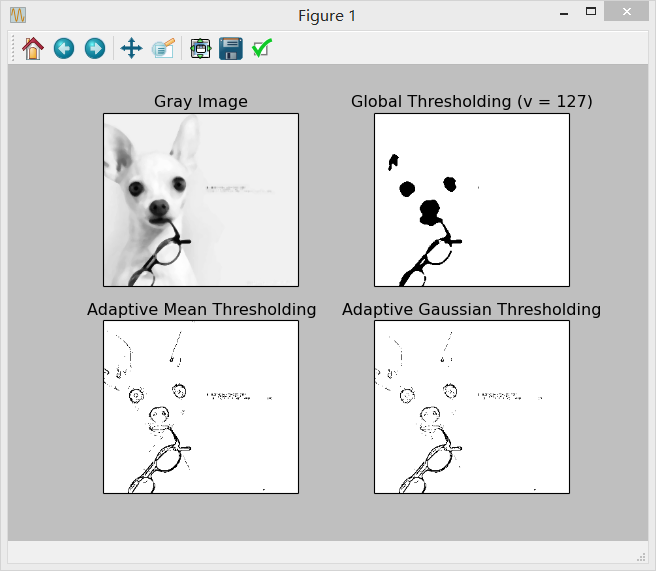
自适应阈值:
当同一幅图像上的不同部分的具有不同亮度时。这种情况下我们需要采用自适应阈值。此时的阈值是根据图像上的每一个小区域计算与其对应的阈值。因此在同一幅图像上的不同区域采用的是不同的阈值,从而使我们能在亮度不同的情况下得到更好的结果。
cv2.adaptiveThreshold()
函数:第一个参数 src 指原图像,原图像应该是灰度图。
第二个参数 x 指当像素值高于(有时是小于)阈值时应该被赋予的新的像素值
第三个参数 adaptive_method 指: CV_ADAPTIVE_THRESH_MEAN_C 或 CV_ADAPTIVE_THRESH_GAUSSIAN_C
第四个参数 threshold_type 指取阈值类型:必须是下者之一 • CV_THRESH_BINARY,
• CV_THRESH_BINARY_INV
第五个参数 block_size 指用来计算阈值的象素邻域大小: 3, 5, 7, ...
第六个参数 param1 指与方法有关的参数。对方法CV_ADAPTIVE_THRESH_MEAN_C 和 CV_ADAPTIVE_THRESH_GAUSSIAN_C, 它是一个从均值或加权均值提取的常数, 尽管它可以是负数。
自适应阈值: 对方法CV_ADAPTIVE_THRESH_MEAN_C,先求出块中的均值,再减掉param1。
对方法 CV_ADAPTIVE_THRESH_GAUSSIAN_C ,先求出块中的加权和(gaussian), 再减掉param1。
例如:
采用方法 CV_ADAPTIVE_THRESH_MEAN_C,阈值类型:CV_THRESH_BINARY, 阈值的象素邻域大小 block_size 选取3,参数param1 取3和5时:



部分原图像像素值 当参数param1为5时

部分原图像像素值 当参数param1为7时
选取对应领域(3*3)求其均值,然后减去参数param1的值为自适应阈值。测试时求得均值为小数时,貌似进行四舍五入之后再减去参数param1。(可能是我没测试准确,无聊时测试一下,共同学习)
Python+opencv代码:
import cv2
import numpy as np
from matplotlib import pyplot as plt
img = cv2.imread('1.bmp')
GrayImage=cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
# 中值滤波
GrayImage= cv2.medianBlur(GrayImage,)
ret,th1 = cv2.threshold(GrayImage,,,cv2.THRESH_BINARY)
# 为Block size, 5为param1值
th2 = cv2.adaptiveThreshold(GrayImage,,cv2.ADAPTIVE_THRESH_MEAN_C,\
cv2.THRESH_BINARY,,)
th3 = cv2.adaptiveThreshold(GrayImage,,cv2.ADAPTIVE_THRESH_GAUSSIAN_C,\
cv2.THRESH_BINARY,,)
titles = ['Gray Image', 'Global Thresholding (v = 127)',
'Adaptive Mean Thresholding', 'Adaptive Gaussian Thresholding']
images = [GrayImage, th1, th2, th3]
for i in xrange():
plt.subplot(,,i+),plt.imshow(images[i],'gray')
plt.title(titles[i])
plt.xticks([]),plt.yticks([])
plt.show()
效果图:
python-opencv 图像二值化,自适应阈值处理的更多相关文章
- python实现图像二值化
1.什么是图像二值化 彩色图像: 有blue,green,red三个通道,取值范围均为0-255 灰度图:只有一个通道0-255,所以一共有256种颜色 二值图像:只有两种颜色,黑色和白色,二值化就是 ...
- opencv python 图像二值化/简单阈值化/大津阈值法
pip install matplotlib 1简单的阈值化 cv2.threshold第一个参数是源图像,它应该是灰度图像. 第二个参数是用于对像素值进行分类的阈值, 第三个参数是maxVal,它表 ...
- opencv python:图像二值化
import cv2 as cv import numpy as np import matplotlib.pyplot as plt # 二值图像就是将灰度图转化成黑白图,没有灰,在一个值之前为黑, ...
- opencv图像二值化的函数cvThreshold()。 cvAdaptiveThreshol
OpenCV中对图像进行二值化的关键函数——cvThreshold(). 函数功能:采用Canny方法对图像进行边缘检测 函数原型: void cvThreshold( const CvArr* sr ...
- Python+OpenCV图像处理(十)—— 图像二值化
简介:图像二值化就是将图像上的像素点的灰度值设置为0或255,也就是将整个图像呈现出明显的黑白效果的过程. 一.普通图像二值化 代码如下: import cv2 as cv import numpy ...
- OpenCV_基于局部自适应阈值的图像二值化
在图像处理应用中二值化操作是一个很常用的处理方式,例如零器件图片的处理.文本图片和验证码图片中字符的提取.车牌识别中的字符分割,以及视频图像中的运动目标检测中的前景分割,等等. 较为常用的图像二值化方 ...
- [python-opencv]图像二值化【图像阈值】
图像二值化[图像阈值]简介: 如果灰度图像的像素值大于阈值,则为其分配一个值(可以是白色255),否则为其分配另一个值(可以是黑色0) 图像二值化就是将灰度图像上的像素值设置为0或255,也就是将整个 ...
- openCV_java 图像二值化
较为常用的图像二值化方法有:1)全局固定阈值:2)局部自适应阈值:3)OTSU等. 局部自适应阈值则是根据像素的邻域块的像素值分布来确定该像素位置上的二值化阈值.这样做的好处在于每个像素位置处的二值化 ...
- Win8 Metro(C#)数字图像处理--2.59 P分位法图像二值化
原文:Win8 Metro(C#)数字图像处理--2.59 P分位法图像二值化 [函数名称] P分位法图像二值化 [算法说明] 所谓P分位法图像分割,就是在知道图像中目标所占的比率Rat ...
- Win8 Metro(C#)数字图像处理--2.55OSTU法图像二值化
原文:Win8 Metro(C#)数字图像处理--2.55OSTU法图像二值化 [函数名称] Ostu法图像二值化 WriteableBitmap OstuThSegment(Writ ...
随机推荐
- MFC添加自定义窗口消息
原文链接: http://www.cnblogs.com/smartvessel/archive/2011/07/18/2109472.html 1. 在头文件stdafx.h中增加一个自定义消息宏 ...
- matlab中的Traing、Validation、Testing
<matlab神经网络30个案例分析> ROC曲线是反映敏感性和特异性连续变量的综合指标,roc曲线真阳性率为纵坐标,假阳性率为横坐标,在坐标上由无数个临界值求出的无数对真阳性率和假阳性率 ...
- JavaWeb下载文件response
以下代码在 chrome.firefox,安卓自带手机浏览器上测试通过,但未经过完全测试,先记录下 public static void downLoadFile(HttpServletRequest ...
- 简单示例:Spring4 整合 单个Redis服务
1. 引入spring-data-redis.jar API:https://docs.spring.io/spring-data/redis/docs/current/api/org/springf ...
- python2 与 python3的区别总结
python2 与 python3的区别总结 几乎所有的Python 2程序都需要一些修改才能正常地运行在Python 3的环境下.为了简化这个转换过程,Python 3自带了一个叫做2to3的 ...
- HTML框架标签的使用-<frameset>
<html> <head> <title> frameset框架的使用-使用frameset框架进行布局 </title> <!-- 标签名称:f ...
- C++头文件<bits/stdc++.h>
在刷题时,总发现有的只写一行头文件 #include <bits/stdc++.h> . 查阅资料后,才知道原来:#include<bits/stdc++.h>包含了目前c++ ...
- Eclipse中如何安装和使用GrepCode插件 (转)
GrepCode(GC)Eclipse插件允许Eclipse用户在Eclipse IDE中搜索由GrepCode提供的工厂类.本教程介绍如何安装和使用插件.使用Eclipse3.5(Galileo)的 ...
- java https 请求
http://li3huo.com/index.php/2009/09/https-certificates-are-ignoring-the-right-java-http-client/
- javascript原生代码取单选框的值
网上搜索到的,项目中正好用到,先记下来,以后直接从自己的博客上复制粘贴!!! //取单选框选择中的值,传入单选框的name function getRadioBoxValue(radioName) { ...