自动驾驶技术之——无人驾驶中的CAN总线
CAN总线在整个无人驾驶系统中有着十分重要的作用。除了在VCU信号需要通过CAN总线进行传输外,无人车上的某些传感器(如雷达、Mobileye)的信号传递也是通过CAN实现的。
前言
本文主要内容是——无人驾驶中的CAN(Controller Area Network )总线。
CAN总线在整个无人驾驶系统中有着十分重要的作用。除了在VCU信号需要通过CAN总线进行传输外,无人车上的某些传感器(如雷达、Mobileye)的信号传递也是通过CAN实现的。
我在无人驾驶,个人如何研究?中提到过
实现一个无人驾驶系统,会有几个层级: 感知层 → 融合层 → 规划层 → 控制层 更具体一点为: 传感器层 → 驱动层 → 信息融合层 → 决策规划层 → 底层控制层
“传感器层”在之前的分享中已经介绍过了,这次主要介绍的是“驱动层”相关的内容。
正文
CAN通信是一套高性能、高可靠性的通信机制,目前已广泛应用在汽车电子领域。有关CAN的总线的原理及特性并不是本次分享的重点。本文的重点在无人驾驶系统获取到CAN消息后,如何根据CAN协议,解析出想要的数据。从CAN总线中解析出传感器的信息,可以说是每个自动驾驶工程师,甚至每一个汽车电子工程师必备的技能。
认识CAN消息
以百度推出的Apollo开源的代码为例做CAN消息的讲解,我们先看到每一帧的CAN消息是如何被定义的。
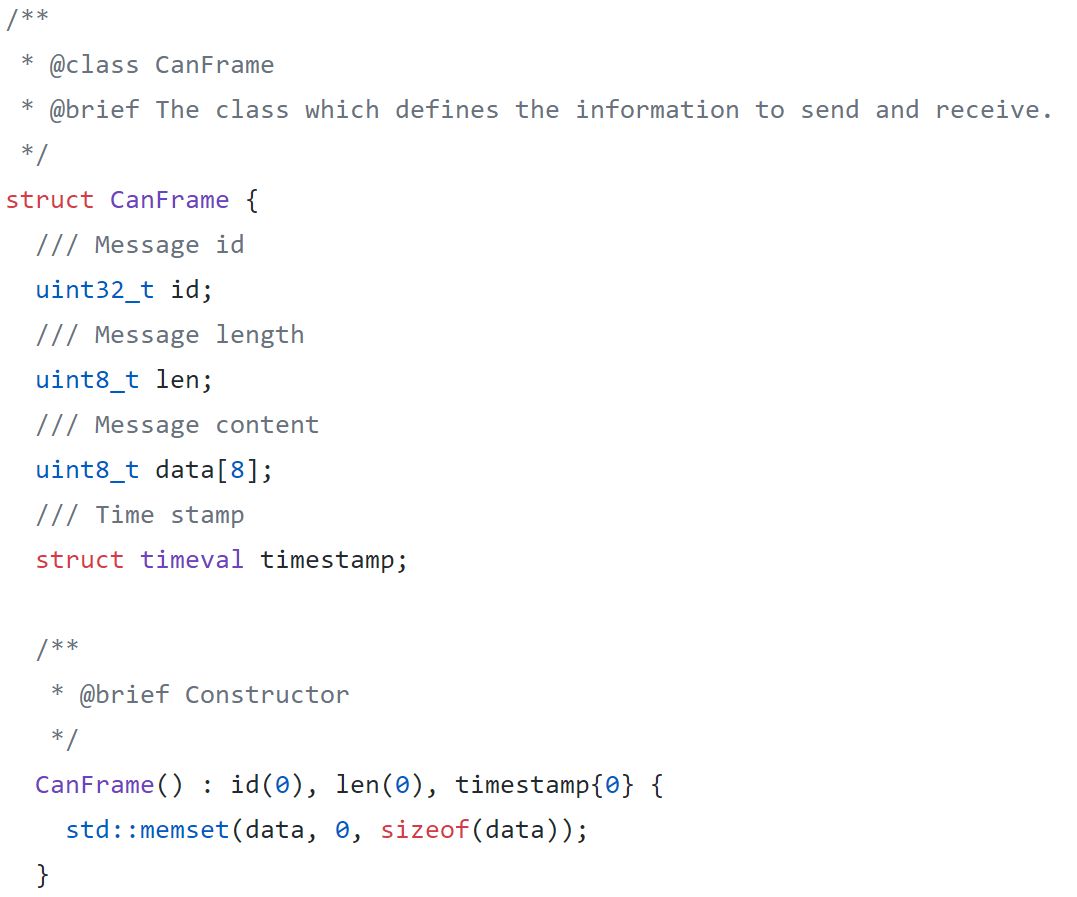
可以看到这个名为CanFrame的消息结构中包含4个关键信息,分别是:
1. uint32_t id
CAN消息的ID号。
由于CAN总线上传播着大量CAN消息,因此两个节点进行通信时,会先看id号,以确保这是节点想要的CAN消息。最初的CAN消息id号的范围是000-7FF(16进制数),但随着汽车电控信号的增多,需要传递的消息变多,信息不太够用了。工程师在CAN消息基础上,扩展了id号的范围,大大增加了id号的上限,并将改进后的CAN消息称为“扩展帧”,旧版CAN消息称为“普通帧”。
如果拿写信做比较,这个id就有点类似写在信件封面上的名字。
2. uint8_t len
CAN消息的有效长度。
每一帧CAN消息能够传递最多8个无符号整形数据,或者说能够传递8*8的bool类型的数据。这里的len最大值为8,如果该帧CAN消息中有些位没有数据,这里的len就会小于8。
3. uint8_t data[8]
CAN消息的实际数据。
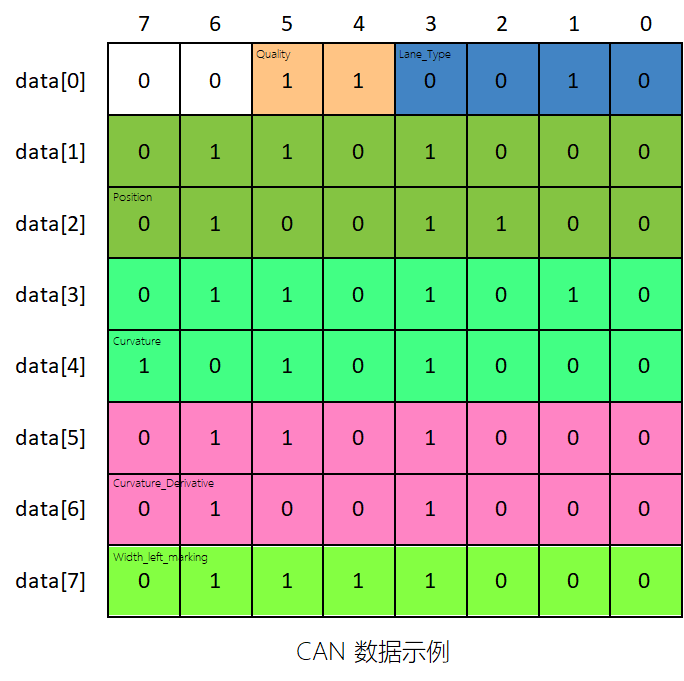
正如刚才提到的,每一帧CAN消息都包含至多8*8个bool类型的数据,因此可以通过8*8个方格,可视化CAN消息中的data。如下图所示:
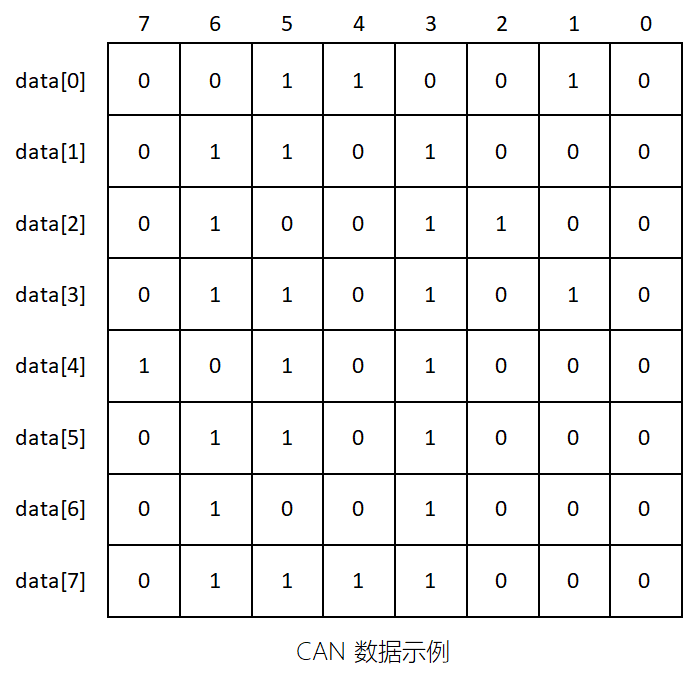
在没有CAN协议帮助我们解析的情况下,这里的数据无异于乱码,根本无法得到有用的消息,这也是CAN消息难以破解的原因之一。
4. timestamp
CAN消息的时间戳。
时间戳表示的是收到该CAN消息的时刻。通过连续多帧的时间戳,可以计算出CAN消息的发送周期,也可以用于判断CAN消息是否被持续收到。
综上,每帧CAN消息中最重要的部分其实是data,即8*8的bool值。所谓解析CAN消息,其实就是解析这8*8个bool类型的值。
认识CAN协议
目前业界的CAN协议,都是以后缀名为dbc的文件进行存储的。德国Vector公司提供CANdb++ Editor是一款专门用于阅读dbc文件的软件。
如下图所示,为Mobileye提供的车道线的dbc文件。(文末提供CANdb++ Editor安装包和Mobileye车道线的dbc文件的获取方法)
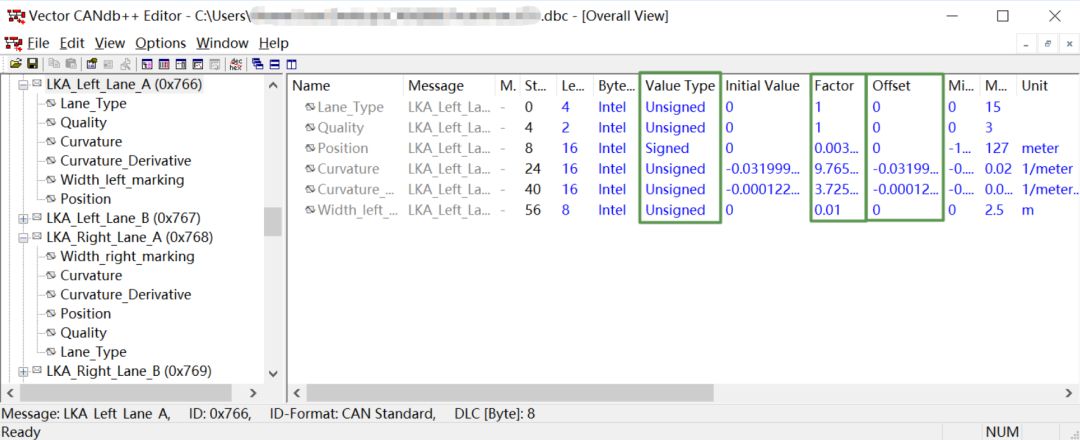
以id号为0x766的LKA_Left_Lane_A为例,这是Mobileye检测无人车左侧车道线的部分信息,包括了左侧车道线的偏移量,曲率等。该帧CAN消息(Message)中的五个信号(Signal),分别是Lane_Type、Quality、Curvature、Curvature_Derivative、Width_left_marking、Position。
每个信号的具体描述显示在软件右侧,其中与解析直接相关的三个要素已用绿色框选中。
1. Value Type(Unsigned或Signed)
某些物理量在描述时是有符号的,比如温度。而描述另外一些量时,是没有符号的,即均为正数,比如说曲率。
2. Factor 和 Offset
这两个参数需要参与实际的物理量运算,Factor是倍率,Offset是偏移量。例如Lane_Type和Quality信号的Factor为1,Offset为0,而其他信号的Factor均为小数。具体的计算方法请往下看。
双击LKA_Left_Lane_A,打开Layout页,会发现很熟悉的方块阵列,如下图所示。
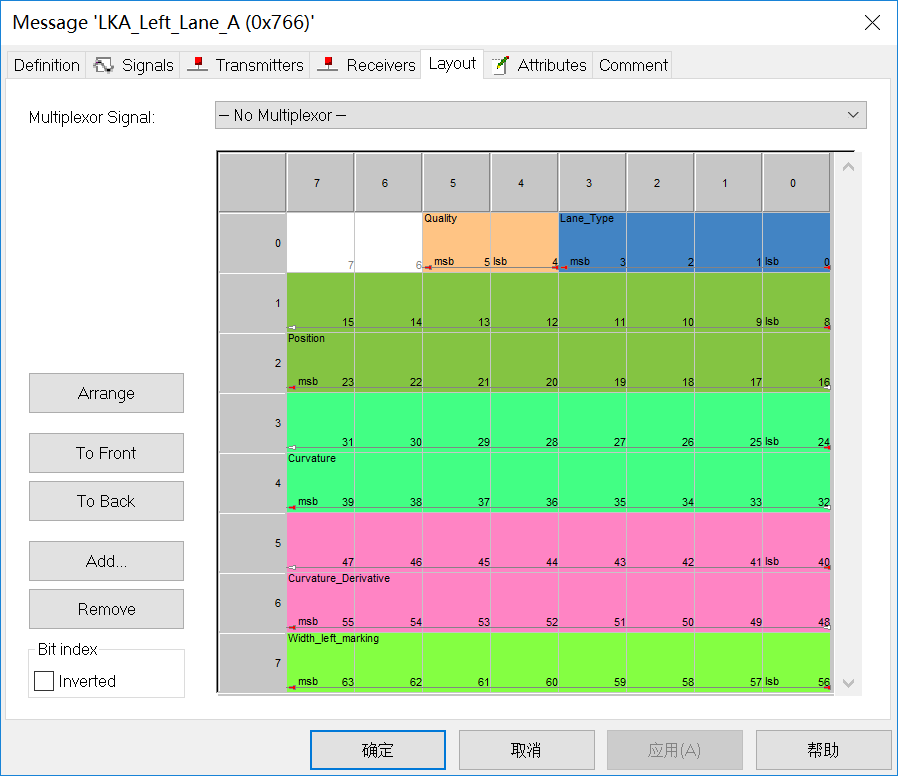
工程师真正关心的恰好是这块彩色图,因为该图上的每个小方块和data中的每一个bool量一一对应。这就是CAN协议的真面目。
解析CAN信号
由于彩色方块图与data是一一对应的,我们将两个图叠加,将得到如下图所示的data图。
每个信号物理量的计算公式为:

1.Factor为1的物理量
由于Lane_Type和Quality的Factor为1,Offset为0,因此十进制值为多少,实际物理量即为多少。
从图中就能直接看出Quality这个信号占据两个位,二进制数11,换算为十进制是3(1*2 + 1*1);Lane_Type占据四个位,二进制数为0010,换算为十进制是2(0*8 + 0*4 + 1*2 + 0*1)。
所以这一帧信号表示此时的左车道线Lane_Type值为2,Quality值为3。对于整数值,通信双方可以约定规则,比如Mobileye就规定了,Quality为0或者1时表示车道线的置信度较低,不推荐使用此时的值;2表示置信度中等,3表示置信度较高,请放心使用。
2.Factor为小数的物理量
对于Factor不为1的物理量,比如Position,需要使用移位的方法进行解析,但解析公式保持不变。以百度 Apollo提供的源码为例进行讲解。

这里的bytes即为CAN消息中的data,首先将Position信号所在的行取出来,将第1行的8个bool值存储在变量t1中,将第二行的8个bool值存储在变量t0中。由于在这条CAN消息中,Position同时占据了高8位和低8位,因此需要将第一行和第二行的所有bool位拿来计算,高8位存储在32位的变量x中,低8位存储在32位的变量t中
现在需要将高8位和低8位拼接,将高8位左移8位,然后与低8位求或运算,即可得到Position的二进制值。随后进行的左移16位,再右移16位的操作是为了将32位的变量x的高16位全部初始化为0。之后将x乘以Factor再加上Offset即可得到真实的Position值,给真实值加上单位meter,即可获取实际的物理量。
与CAN类似的通信协议
VCU、雷达等通过CAN总线传递信号,随着CAN的负载越来越高,很多传感器选择了其他通信方式。比如激光雷达的点云数据量太过庞大,使用的是局域网的方式进行传递;再比如GPS和惯导使用的是串口进行通信。
虽然通信方式和通信协议千差万别,但解析的方法都是一样的。
结语
好了(^o^)/~,这篇分享的内容基本上讲清楚了CAN总线消息的解析过程。这是无人驾驶系统传感器驱动层的基本理论。
由于不同ID的CAN消息的结构不一样,因此在写解析代码时,需要十分仔细,否则会给后续处理带来想不到的bug。
如果你对CAN总线的解析还有什么疑问,可以在评论区与我互动。
▎本文转载自自动驾驶干货铺,作者:陈光,智车科技整编,转载请注明来源。
自动驾驶技术之——无人驾驶中的CAN总线的更多相关文章
- 本号讯 | 微软和百度携手推进全球自动驾驶技术; 微软发布新一代可垂直可水平滚动的Arc鼠标
7 月 13 日,微软宣布了与宝马的最新合作进展,继语音助手 Cortana .云服务 Azure.Office 365 和微软 Exchange 安装在部分宝马车型后——Skype for Busi ...
- L4自动驾驶技术
L4自动驾驶技术 一.SAE的五个级别分别是: L0:驾驶员完全掌控车辆,无任何自动化能力. L1:自动系统有时能够辅助驾驶员完成某些驾驶任务.比如高速自动巡航(自动认知所在车道),和一些驾驶辅助功能 ...
- Js日期选择器并自动加入到输入框中
<html> <head> <title>Js日期选择器并自动加入到输入框中</title> <meta http-equiv="con ...
- 自动匹配HTTP请求中对应实体参数名的数据(性能不是最优)
/// <summary> /// 获取请求参数字段 /// </summary> /// <typeparam name="T"></t ...
- cookie是指web浏览器存储的少量数据,该数据会在每次请求一个相关的URL时自动传到服务器中(转)
基本概念:cookie是指web浏览器存储的少量数据,该数据会在每次请求一个相关的URL时自动传到服务器中. 以博客园为例,我们看看cookie有哪些属性: 1.Name:cookie的名称: 2.V ...
- springboot属性类自动加载配置文件中的值
springboot属性类自动加载配置文件中的值,如Person类加载在yml中配置的name,age等属性值,可以通过如下步骤获取: 类上添加@ConfigurationProperties注解,p ...
- 自动统计安卓log中Anr,Crash,Singnal出现数量的Python脚本 (转载)
自动统计安卓log中Anr,Crash,Singnal出现数量的Python脚本 转自:https://www.cnblogs.com/ailiailan/p/8304989.html 作为测试, ...
- ssh整合思想初步 struts2与Spring的整合 struts2-spring-plugin-2.3.4.1.jar下载地址 自动加载Spring中的XML配置文件 Struts2下载地址
首先需要JAR包 Spring整合Structs2的JAR包 struts2-spring-plugin-2.3.4.1.jar 下载地址 链接: https://pan.baidu.com/s/1o ...
- Linux驱动中的platform总线分析
copy from :https://blog.csdn.net/fml1997/article/details/77622860 概述 从Linux2.6内核起,引入一套新的驱动管理和注册机制:pl ...
随机推荐
- vue单页面模板说明文档(2)
Linter Configuration This boilerplate uses ESLint as the linter, and uses the Standard preset with s ...
- K3BOM跳层
A自制件,B自制件,C外购件 ,结构为A-B-C 如果需要跳层,则设置A-B跳层,B-C跳层,则生成A计划订单,C计划订单, 假设单独A-B跳层,则MRP运算出的结果也是A计划订单,B计划订单,C计划 ...
- 腾讯机试题 AcWing 603 打怪兽
题目链接:https://www.acwing.com/problem/content/605/ 题目大意: 略 分析: 用dp[i][j]表示用j元钱能在前i只怪兽上所能贿赂到的最大武力值. 有一种 ...
- git客户端下载 和安装
网址 https://git-scm.com/download/win 点击next 说明: (1)图标组件(Addition icons) : 选择是否创建桌面快捷方式. (2)桌面浏览(Wind ...
- 爬虫实战——Scrapy爬取伯乐在线所有文章
Scrapy简单介绍及爬取伯乐在线所有文章 一.简说安装相关环境及依赖包 1.安装Python(2或3都行,我这里用的是3) 2.虚拟环境搭建: 依赖包:virtualenv,virtualenvwr ...
- PHP爬虫框架Snoopy的使用
参考文档: http://ibillxia.github.io/blog/2010/08/10/php-connecting-tool-snoopy-introduction-and-applicat ...
- ES 6 系列 - Module 的语法
es 6 大幅度优化了模块化编程的规范. 写在前面:在 es6 之前,说起 js 的模块化,一般都避不开 CommonJs 和 AMD 两种方案.这两种方案,前者应用于服务器,后者应用于浏览器.而 e ...
- cuda编程视频资料
胡文美教授 http://www.gpuworld.cn/article/show/463.html
- APP需求调研、对比
二.人脸验证 1.芝麻认证 : 0.4元/次,需要企业企业认证.不能有与芝麻信用类似的业务,如:保险... 2.旷视 : 0.5/次.企业认证.业务限制 3. 百度人脸识别 : 企业认证. 4.科大 ...
- Repository HDU - 2846 字典树
题意:给出很多很多很多很多个 单词 类似搜索引擎一下 输入一个单词 判断有一个字符串包含这个单词 思路:字典树变体,把每个单词的后缀都扔字典树里面,这里要注意dd是一个单词 但是把d 和dd都放字典树 ...