Linux电源管理-Linux regulator framework概述
前言
问题
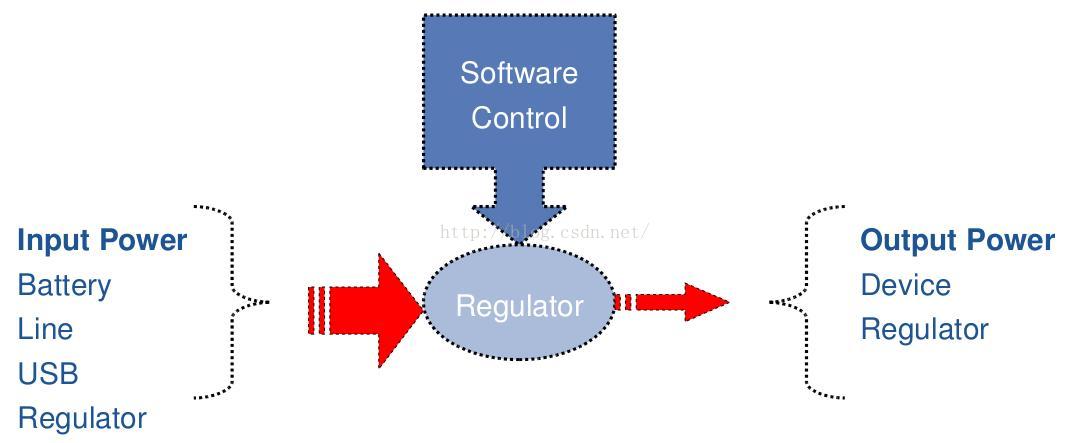
Linux Regulator Framework
machine
struct regulator_init_data {
const char *supply_regulator; /* or NULL for system supply */
struct regulation_constraints constraints;
int num_consumer_supplies;
struct regulator_consumer_supply *consumer_supplies;
/* optional regulator machine specific init */
int (*regulator_init)(void *driver_data);
void *driver_data; /* core does not touch this */
};
struct regulation_constraints {
const char *name;
/* voltage output range (inclusive) - for voltage control */
int min_uV;
int max_uV;
int uV_offset;
/* current output range (inclusive) - for current control */
int min_uA;
int max_uA;
/* valid regulator operating modes for this machine */
unsigned int valid_modes_mask;
/* valid operations for regulator on this machine */
unsigned int valid_ops_mask;
/* regulator input voltage - only if supply is another regulator */
int input_uV;
/* regulator suspend states for global PMIC STANDBY/HIBERNATE */
struct regulator_state state_disk;
struct regulator_state state_mem;
struct regulator_state state_standby;
suspend_state_t initial_state; /* suspend state to set at init */
/* mode to set on startup */
unsigned int initial_mode;
unsigned int ramp_delay;
unsigned int enable_time;
/* constraint flags */
unsigned always_on:; /* regulator never off when system is on */
unsigned boot_on:; /* bootloader/firmware enabled regulator */
unsigned apply_uV:; /* apply uV constraint if min == max */
unsigned ramp_disable:; /* disable ramp delay */
};
#define REGULATOR_MODE_NORMAL 0x2 //正常模式,大多数驱动都使用这种模式
#define REGULATOR_MODE_IDLE 0x4 //设备在idle状态,regulator给设备提供服务
#define REGULATOR_MODE_STANDBY 0x8 //设备在standby状态,regulator给设备提供服务
#define REGULATOR_CHANGE_CURRENT 0x2 //该regulator可以改变电流
#define REGULATOR_CHANGE_MODE 0x4 //该regulator可以改变mode
#define REGULATOR_CHANGE_STATUS 0x8 //该regulator可以改变状态,也就是enable/disable power
#define REGULATOR_CHANGE_DRMS 0x10 //该regulator可以动态该变mode
#define REGULATOR_CHANGE_BYPASS 0x20 //该regulator支持bypass mode
.input_uV: 表示该regulator的input是另一个regulator。
.apply_uV: 当min_uV=max_uV的时候时使用。
Linux电源管理-Linux regulator framework概述的更多相关文章
- Linux电源管理(7)_Wakeup events framework【转】
转自:http://www.wowotech.net/pm_subsystem/wakeup_events_framework.html 1. 前言 本文继续“Linux电源管理(6)_Generi ...
- Linux电源管理(7)_Wakeup events framework
1. 前言 本文继续"Linux电源管理(6)_Generic PM之Suspend功能"中有关suspend同步以及PM wakeup的话题.这个话题,是近几年Linux ker ...
- Linux电源管理(1)-整体架构【转】
本文转载自:http://www.wowotech.net/pm_subsystem/pm_architecture.html 1. 前言 在这个世界中,任何系统的运转都需要能量.如树木依靠光能生长, ...
- Linux电源管理(9)_wakelocks【转】
1. 前言 wakelocks是一个有故事的功能. wakelocks最初出现在Android为linux kernel打的一个补丁集上,该补丁集实现了一个名称为"wakelocks&quo ...
- Linux电源管理_autosleep--(五)【转】
本文转载自:https://blog.csdn.net/wlsfling/article/details/46005409 1. 前言 Autosleep也是从Android wakelocks补丁集 ...
- Linux电源管理(2)-Generic PM基本概念和软件架构【转】
本文转载自:http://www.wowotech.net/pm_subsystem/generic_pm_architecture.html 1. 前言 这里的Generic PM,是蜗蜗自己起的名 ...
- linux电源管理系列(一)
本系列将逐步介绍linux电源管理相关的知识,涉及到常见电源管理机制.linux电源管理机制.linux驱动中有关电源管理的相关接口.内核文档中关于Linux电源管理架构文档的分析.以下将以此来介绍相 ...
- ARM linux电源管理——Cortex A系列CPU(32位)睡眠和唤醒的底层汇编实现
ARM linux电源管理——Cortex A系列CPU(32位)睡眠和唤醒的底层汇编实现 承接 http://www.wowotech.net/pm_subsystem/suspend_and_re ...
- Linux电源管理(5)_Hibernate和Sleep功能介绍【转】
本文转载自:http://www.wowotech.net/pm_subsystem/std_str_func.html 1. 前言 Hibernate和Sleep两个功能是Linux Generic ...
随机推荐
- Qt5_当前exe所在路径
可以通过以下方式来获取: 1. #include <QDir>#include <QDebug> QDir dir; qDebug() << "curre ...
- [原][unreal][UE][spark]分析unreal engine 虚幻引擎的粒子编辑器:Cascade
参考:https://www.raywenderlich.com/270-unreal-engine-4-particle-systems-tutorial (使用了一个飞机射击游戏的粒子来展示,全英 ...
- Git Gui 常见错误
- npm install 报错ERR! 404 Not Found: event-stream@3.3.6
在win下开发的node工程,在linux下用dockerfile部署时,遇到npm install时报错 Step / : RUN npm install ---> Running in 2e ...
- ubuntu 18.04编译opencv3.4.3 with python3.6 cuda9.2 gdal
惭愧,之前一直没在linux下编译过opencv,也没用过纯命令行版的cmake,现在咬牙编译一次.其实感觉还凑合. opencv官网文档还是那么烂:https://docs.opencv.org/m ...
- 餐E评echarts
所需要的数据结构 option = { num:1212,//商圈数 numRate:34%,//商圈增长率 activation:1231,//活跃度 activationRate:23%,//活跃 ...
- 最小高度的树 Minimum Height Trees
2018-09-24 12:01:38 问题描述: 问题求解: 毫无疑问的一条非常好的题目,采用的解法是逆向的BFS,也就是从叶子节点开始遍历,逐步向中心靠拢,最终留下的叶子节点就是答案. publi ...
- nodejs初识
提到nodejs总离不开npm,因此首先要学些和了解npm.而对于npm.nodejs的了解都来源于菜鸟教程. nodejs学习地址:http://www.runoob.com/nodejs/node ...
- python2.x编码问题实例
1,编码问题,主要是区分面向人类的字符串,面向计算机的字节序列 在python3中,字符串是str(默认即unicode),字节序列是bytes 在python2中,字符串是unicode,字节序列是 ...
- 20171026python读取txt写入csv
import csv def get_lines(filepath): with open(filepath) as file_object: lines=set(file_object.readli ...