RRT路径规划算法(matlab实现)
基于快速扩展随机树(RRT / rapidly exploring random tree)的路径规划算法,通过对状态空间中的采样点进行碰撞检测,避免了对空间的建模,能够有效地解决高维空间和复杂约束的路径规划问题。该方法的特点是能够快速有效地搜索高维空间,通过状态空间的随机采样点,把搜索导向空白区域,从而寻找到一条从起始点到目标点的规划路径,适合解决多自由度机器人在复杂环境下和动态环境中的路径规划。与PRM类似,该方法是概率完备且不最优的。
RRT是一种多维空间中有效率的规划方法。它以一个初始点作为根节点,通过随机采样增加叶子节点的方式,生成一个随机扩展树,当随机树中的叶子节点包含了目标点或进入了目标区域,便可以在随机树中找到一条由从初始点到目标点的路径。基本RRT算法如下面伪代码所示:

function feasible=collisionChecking(startPose,goalPose,map)%冲突检查:判断起始点到终点之间是否有障碍物 feasible=true;%可行的,可执行的
dir=atan2(goalPose(1)-startPose(1),goalPose(2)-startPose(2));%目标点和起始点之间的角度
for r=0:0.5:sqrt(sum((startPose-goalPose).^2))%sqrt(sum((startPose-goalPose).^2)):两点间的距离
posCheck = startPose + r.*[sin(dir) cos(dir)];%以0.5的间隔得到中间的点
if ~(feasiblePoint(ceil(posCheck),map) && feasiblePoint(floor(posCheck),map) && ...
feasiblePoint([ceil(posCheck(1)) floor(posCheck(2))],map) && feasiblePoint([floor(posCheck(1)) ceil(posCheck(2))],map))
feasible=false;break;
end
if ~feasiblePoint([floor(goalPose(1)),ceil(goalPose(2))],map), feasible=false; end end function feasible=feasiblePoint(point,map)%判断点是否在地图内,且没有障碍物
feasible=true;
if ~(point(1)>=1 && point(1)<=size(map,1) && point(2)>=1 && point(2)<=size(map,2) && map(point(2),point(1))==255)%map(point(2),point(1))==255:没有障碍物
feasible=false;
end
function distance=Distance(start_Pt,goal_Pt)
distance=sqrt((start_Pt(1)-goal_Pt(1))^2+(start_Pt(2)-goal_Pt(2))^2);
function [X_near,index]=Near(X_rand,T)
min_distance=sqrt((X_rand(1)-T.v(1).x)^2+(X_rand(2)-T.v(1).y)^2);
for T_iter=1:size(T.v,2)
temp_distance=sqrt((X_rand(1)-T.v(T_iter).x)^2+(X_rand(2)-T.v(T_iter).y)^2);
if temp_distance<=min_distance
min_distance=temp_distance;
X_near(1)=T.v(T_iter).x
X_near(2)=T.v(T_iter).y
index=T_iter;
end
end
function X_rand=Sample(map,goal)
% if rand<0.5
% X_rand = rand(1,2) .* size(map); % random sample
% else
% X_rand=goal;
% end if unifrnd(0,1)<0.5
X_rand(1)= unifrnd(0,1)* size(map,1); % 均匀采样
X_rand(2)= unifrnd(0,1)* size(map,2); % random sample
else
X_rand=goal;
end
function X_new=Steer(X_rand,X_near,StepSize)
theta = atan2(X_rand(1)-X_near(1),X_rand(2)-X_near(2)); % direction to extend sample to produce new node
X_new = X_near(1:2) + StepSize * [sin(theta) cos(theta)]; % dir_x = X_rand(1)- X_near(1);
% dir_y = X_rand(2)- X_near(2);
% dir = sqrt(dir_x^2 + dir_y^2);
% X_new(1) = dir_x * StepSize/dir+X_near(1);
% X_new(2) = dir_y * StepSize/dir+X_near(2);
function X_rand=Sample(map,goal)
% if rand<0.5
% X_rand = rand(1,2) .* size(map); % random sample
% else
% X_rand=goal;
% end if unifrnd(0,1)<0.5
X_rand(1)= unifrnd(0,1)* size(map,1); % 均匀采样
X_rand(2)= unifrnd(0,1)* size(map,2); % random sample
else
X_rand=goal;
end
%***************************************
%Author: Chenglong Qian
%Date: 2019-11-5
%***************************************
%% 流程初始化
clear all; close all;
x_I=1; y_I=1; % 设置初始点
x_G=700; y_G=700; % 设置目标点
goal(1)=x_G;
goal(2)=y_G;
Thr=50; %设置目标点阈值 当到这个范围内时则认为已到达目标点
Delta= 30; % 设置扩展步长,扩展结点允许的最大距离
%% 建树初始化
T.v(1).x = x_I; % T是我们要做的树,v是节点,这里先把起始点加入到T里面来
T.v(1).y = y_I;
T.v(1).xPrev = x_I; % 起始节点的父节点仍然是其本身
T.v(1).yPrev = y_I;
T.v(1).dist=0; %从父节点到该节点的距离,这里可取欧氏距离
T.v(1).indPrev = 0; %父节点的索引
%% 开始构建树——作业部分
figure(1);
ImpRgb=imread('newmap.png');
Imp=rgb2gray(ImpRgb);
imshow(Imp)
xL=size(Imp,1);%地图x轴长度
yL=size(Imp,2);%地图y轴长度
hold on
plot(x_I, y_I, 'ro', 'MarkerSize',10, 'MarkerFaceColor','r');
plot(x_G, y_G, 'go', 'MarkerSize',10, 'MarkerFaceColor','g');% 绘制起点和目标点
count=1;
for iter = 1:3000
% x_rand=[];
%Step 1: 在地图中随机采样一个点x_rand
%提示:用(x_rand(1),x_rand(2))表示环境中采样点的坐标
x_rand=Sample(Imp,goal);
% x_near=[];
%Step 2: 遍历树,从树中找到最近邻近点x_near
%提示:x_near已经在树T里
[x_near,index]= Near(x_rand,T);
plot(x_near(1), x_near(2), 'go', 'MarkerSize',2);
% x_new=[];
%Step 3: 扩展得到x_new节点
%提示:注意使用扩展步长Delta
x_new=Steer(x_rand,x_near,Delta);
%检查节点是否是collision-free
if ~collisionChecking(x_near,x_new,Imp) %如果有障碍物则跳出
continue;
end
count=count+1; %Step 4: 将x_new插入树T
%提示:新节点x_new的父节点是x_near
T.v(count).x = x_new(1);
T.v(count).y = x_new(2);
T.v(count).xPrev = x_near(1); % 起始节点的父节点仍然是其本身
T.v(count).yPrev = x_near(2);
T.v(count).dist=Distance(x_new,x_near); %从父节点到该节点的距离,这里可取欧氏距离
T.v(count).indPrev = index; %父节点的索引
%Step 5:检查是否到达目标点附近
%提示:注意使用目标点阈值Thr,若当前节点和终点的欧式距离小于Thr,则跳出当前for循环
if Distance(x_new,goal) < Thr
break;
end
%Step 6:将x_near和x_new之间的路径画出来
%提示 1:使用plot绘制,因为要多次在同一张图上绘制线段,所以每次使用plot后需要接上hold on命令
%提示 2:在判断终点条件弹出for循环前,记得把x_near和x_new之间的路径画出来
% plot([x_near(1),x_near(2)],[x_new(1),x_new(2)]);
% hold on
line([x_near(1),x_new(1)],[x_near(2),x_new(2)]);
pause(0.1); %暂停0.1s,使得RRT扩展过程容易观察
end
%% 路径已经找到,反向查询
if iter < 2000
path.pos(1).x = x_G; path.pos(1).y = y_G;
path.pos(2).x = T.v(end).x; path.pos(2).y = T.v(end).y;
pathIndex = T.v(end).indPrev; % 终点加入路径
j=0;
while 1
path.pos(j+3).x = T.v(pathIndex).x;
path.pos(j+3).y = T.v(pathIndex).y;
pathIndex = T.v(pathIndex).indPrev;
if pathIndex == 1
break
end
j=j+1;
end % 沿终点回溯到起点
path.pos(end+1).x = x_I; path.pos(end).y = y_I; % 起点加入路径
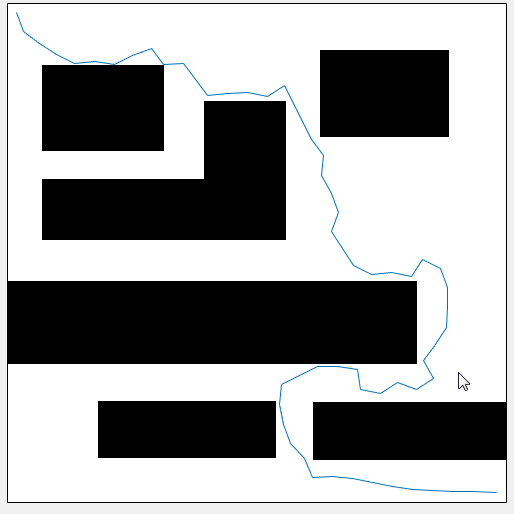
for j = 2:length(path.pos)
plot([path.pos(j).x; path.pos(j-1).x;], [path.pos(j).y; path.pos(j-1).y], 'b', 'Linewidth', 3);
end
else
disp('Error, no path found!');
end
参考链接:https://www.cnblogs.com/flyinggod/p/8727951.html
RRT路径规划算法(matlab实现)的更多相关文章
- RRT路径规划算法
传统的路径规划算法有人工势场法.模糊规则法.遗传算法.神经网络.模拟退火算法.蚁群优化算法等.但这些方法都需要在一个确定的空间内对障碍物进行建模,计算复杂度与机器人自由度呈指数关系,不适合解决多自由度 ...
- ROS(indigo)RRT路径规划
源码地址:https://github.com/nalin1096/path_planning 路径规划 使用ROS实现了基于RRT路径规划算法. 发行版 - indigo 算法在有一个障碍的环境找到 ...
- 全局路径规划算法Dijkstra(迪杰斯特拉算法)- matlab
参考博客链接:https://www.cnblogs.com/kex1n/p/4178782.html Dijkstra是常用的全局路径规划算法,其本质上是一个最短路径寻优算法.算法的详细介绍参考上述 ...
- 路径规划: PRM 路径规划算法 (Probabilistic Roadmaps 随机路标图)
随机路标图-Probabilistic Roadmaps (路径规划算法) 路径规划作为机器人完成各种任务的基础,一直是研究的热点.研究人员提出了许多规划方法如: 1. A* 2. Djstar 3. ...
- DWA局部路径规划算法论文阅读:The Dynamic Window Approach to Collision Avoidance。
DWA(动态窗口)算法是用于局部路径规划的算法,已经在ROS中实现,在move_base堆栈中:http://wiki.ros.org/dwa_local_planner DWA算法第一次提出应该是1 ...
- 基础路径规划算法(Dijikstra、A*、D*)总结
引言 在一张固定地图上选择一条路径,当存在多条可选的路径之时,需要选择代价最小的那条路径.我们称这类问题为最短路径的选择问题.解决这个问题最经典的算法为Dijikstra算法,其通过贪心选择的步骤从源 ...
- PRM路径规划算法
路径规划作为机器人完成各种任务的基础,一直是研究的热点.研究人员提出了许多规划方法:如人工势场法.单元分解法.随机路标图(PRM)法.快速搜索树(RRT)法等.传统的人工势场.单元分解法需要对空间中的 ...
- 路径规划算法之Bellman-Ford算法
最近由于工作需要一直在研究Bellman-Ford算法,这也是我第一次用C++编写代码. 1.Bellman-Ford算法总结 (1)Bellman-Ford算法计算从源点(起始点)到任意一点的最短路 ...
- 机器人路径规划其一 Dijkstra Algorithm【附动态图源码】
首先要说明的是,机器人路径规划与轨迹规划属于两个不同的概念,一般而言,轨迹规划针对的对象为机器人末端坐标系或者某个关节的位置速度加速度在时域的规划,常用的方法为多项式样条插值,梯形轨迹等等,而路径规划 ...
随机推荐
- MOSFET学习
MOS/CMOS集成电路简介及N沟道MOS管和P沟道MOS管 在实际项目中,我们基本都用增强型mos管,分为N沟道和P沟道两种. 我们常用的是NMOS,因为其导通电阻小,且容易制造.在MOS管原理图上 ...
- PCB一些设置记录
开始时设置原点,编辑>>原点>>设置 画PCB时,导入后,根据各个模块放好位置 设计>>类>>添加电源类 设计>>规则>>Cle ...
- Springboot项目静态资源配置
springboot项目的静态资源配置网上有好多,说的也很详细 我今天出错是自定义了一个filter,在shiro里配置的/**,自定义filter 所以一直报302
- express上传图片
var express = require('express') var app = express() var proxy = require('http-proxy-middleware') co ...
- shell从字符串中提取子串(正则表达式)
通过试验,可以通过grep.sed两种方式实现. 假设需要提取libgcc-4.8.5-4.h5.x86_64.rpm中的版本号. grep echo "libgcc-4.8.5-4.h5. ...
- Linux NIO 系列(02) 阻塞式 IO
目录 一.环境准备 1.1 代码演示 二.Socket 是什么 2.1 socket 套接字 2.2 套接字描述符 2.3 文件描述符和文件指针的区别 三.基本的 SOCKET 接口函数 3.1 so ...
- lamp搭建
一.准备工作1.配置本地YUM源 2.关闭selinux以及iptables service iptables stop chkconfig iptables off setenforce 0 vim ...
- 【目录】asp.net core系列篇
随笔分类 - asp.net core系列篇 asp.net core系列 68 Filter管道过滤器 摘要: 一.概述 本篇详细了解一下asp.net core filters,filter叫&q ...
- VS2013+Opencv3.3配置教程
转载自: https://blog.csdn.net/u014797226/article/details/78283873?locationNum=5&fps=1 参考博文1: 操作环境: ...
- 【记录】eclipse / STS 设置注释模版格式/导入注释模版格式
设置注释模板的入口:Window->Preference->Java->Code Style->Code Template 将如下保存在新创建的xml文件中,导入进去 < ...