基于python的ardrone control源码分析与心得
这里有一段python代码,可用于操控ardrone 2.0。实验室曾经借鉴用过,并添加了部分功能。如今复习一下,顺便理理python的相关知识点。
#!/usr/bin/env python # A basic drone controller class for the tutorial "Up and flying with the AR.Drone and ROS | Getting Started"
# https://github.com/mikehamer/ardrone_tutorials_getting_started # This class implements basic control functionality which we will be using in future tutorials.
# It can command takeoff/landing/emergency as well as drone movement
# It also tracks the drone state based on navdata feedback # Import the ROS libraries, and load the manifest file which through <depend package=... /> will give us access to the project dependencies
import roslib; roslib.load_manifest('ardrone_tutorials')
import rospy # Import the messages we're interested in sending and receiving
# 模块的导入最好遵循from module import .. 或者import module 而不是from module import *.用前者可最大程度避免命名空间冲突的问题
# 例如import a, a中有一个类c_a,其中有方法a_foo(), 那么调用规则为a.c_a.a_foo()
# 如果from a import * or from a import c_a 那么可直接调用c_a.a_foo()
# 这里因为模块数量简单,数量较少,所以可以直接from import.而且这里不是import* 而是有针对性的如Empty Navdata
from geometry_msgs.msg import Twist # for sending commands to the drone
from std_msgs.msg import Empty # for land/takeoff/emergency
from ardrone_autonomy.msg import Navdata # for receiving navdata feedback # An enumeration of Drone Statuses
from drone_status import DroneStatus # Some Constants
COMMAND_PERIOD = 100 #ms #BasicDroneController类,第一个类,集合了各种publisher,用于统一向ardrone发送消息。
class BasicDroneController(object):
def __init__(self):
# Holds the current drone status
self.status = -1 # Subscribe to the /ardrone/navdata topic, of message type navdata, and call self.ReceiveNavdata when a message is received
# 和roscpp不同,rospy不需要通过rosspinOnce来显式调用call_back。每一个rospy.Subscriber都会独立启动一个线程来负责消息的订阅。
self.subNavdata = rospy.Subscriber('/ardrone/navdata',Navdata,self.ReceiveNavdata) # Allow the controller to publish to the /ardrone/takeoff, land and reset topics
self.pubLand = rospy.Publisher('/ardrone/land',Empty)
self.pubTakeoff = rospy.Publisher('/ardrone/takeoff',Empty)
self.pubReset = rospy.Publisher('/ardrone/reset',Empty) # Allow the controller to publish to the /cmd_vel topic and thus control the drone
self.pubCommand = rospy.Publisher('/cmd_vel',Twist) # Setup regular publishing of control packets
self.command = Twist()
self.commandTimer = rospy.Timer(rospy.Duration(COMMAND_PERIOD/1000.0),self.SendCommand) # Land the drone if we are shutting down
rospy.on_shutdown(self.SendLand) def ReceiveNavdata(self,navdata):
# Although there is a lot of data in this packet, we're only interested in the state at the moment
self.status = navdata.state def SendTakeoff(self):
# Send a takeoff message to the ardrone driver
# Note we only send a takeoff message if the drone is landed - an unexpected takeoff is not good!
if(self.status == DroneStatus.Landed):
self.pubTakeoff.publish(Empty()) def SendLand(self):
# Send a landing message to the ardrone driver
# Note we send this in all states, landing can do no harm
self.pubLand.publish(Empty()) def SendEmergency(self):
# Send an emergency (or reset) message to the ardrone driver
self.pubReset.publish(Empty()) def SetCommand(self,roll=0,pitch=0,yaw_velocity=0,z_velocity=0):
# Called by the main program to set the current command
self.command.linear.x = pitch
self.command.linear.y = roll
self.command.linear.z = z_velocity
self.command.angular.z = yaw_velocity def SendCommand(self,event):
# The previously set command is then sent out periodically if the drone is flying
if self.status == DroneStatus.Flying or self.status == DroneStatus.GotoHover or self.status == DroneStatus.Hovering:
self.pubCommand.publish(self.command)
#!/usr/bin/env python # An enumeration of drone statuses for the tutorial "Up and flying with the AR.Drone and ROS | Getting Started"
# https://github.com/mikehamer/ardrone_tutorials_getting_started #飞行器机器人状态类
class DroneStatus(object):
Emergency = 0
Inited = 1
Landed = 2
Flying = 3
Hovering = 4
Test = 5
TakingOff = 6
GotoHover = 7
Landing = 8
Looping = 9
#!/usr/bin/env python # A basic video display window for the tutorial "Up and flying with the AR.Drone and ROS | Getting Started"
# https://github.com/mikehamer/ardrone_tutorials_getting_started # This display window listens to the drone's video feeds and updates the display at regular intervals
# It also tracks the drone's status and any connection problems, displaying them in the window's status bar
# By default it includes no control functionality. The class can be extended to implement key or mouse listeners if required # Import the ROS libraries, and load the manifest file which through <depend package=... /> will give us access to the project dependencies
import roslib; roslib.load_manifest('ardrone_tutorials')
import rospy # Import the two types of messages we're interested in
from sensor_msgs.msg import Image # for receiving the video feed
from ardrone_autonomy.msg import Navdata # for receiving navdata feedback # We need to use resource locking to handle synchronization between GUI thread and ROS topic callbacks
from threading import Lock # An enumeration of Drone Statuses
from drone_status import DroneStatus # The GUI libraries
from PySide import QtCore, QtGui # Some Constants
CONNECTION_CHECK_PERIOD = 250 #ms
GUI_UPDATE_PERIOD = 20 #ms
DETECT_RADIUS = 4 # the radius of the circle drawn when a tag is detected # 这里利用qt做界面展示。我们的新类DroneVideoDisplay继承于QtGui.QMainWindow
class DroneVideoDisplay(QtGui.QMainWindow):
# 字典数据结构保存飞行器状态和对应字符串的关系
StatusMessages = {
DroneStatus.Emergency : 'Emergency',
DroneStatus.Inited : 'Initialized',
DroneStatus.Landed : 'Landed',
DroneStatus.Flying : 'Flying',
DroneStatus.Hovering : 'Hovering',
DroneStatus.Test : 'Test (?)',
DroneStatus.TakingOff : 'Taking Off',
DroneStatus.GotoHover : 'Going to Hover Mode',
DroneStatus.Landing : 'Landing',
DroneStatus.Looping : 'Looping (?)'
}
DisconnectedMessage = 'Disconnected'
UnknownMessage = 'Unknown Status' def __init__(self):
# 构造基类,调用基类构造函数。还有一种用法QtGui.QMainWindow.__init__(self)。
# Construct the parent class
super(DroneVideoDisplay, self).__init__() # Setup our very basic GUI - a label which fills the whole window and holds our image
self.setWindowTitle('AR.Drone Video Feed')
self.imageBox = QtGui.QLabel(self)
self.setCentralWidget(self.imageBox) # Subscribe to the /ardrone/navdata topic, of message type navdata, and call self.ReceiveNavdata when a message is received
self.subNavdata = rospy.Subscriber('/ardrone/navdata',Navdata,self.ReceiveNavdata) # Subscribe to the drone's video feed, calling self.ReceiveImage when a new frame is received
self.subVideo = rospy.Subscriber('/ardrone/image_raw',Image,self.ReceiveImage) # 多线程问题,该类将会从ros读取数据的同时,负责显示,这两类操作必须互斥,同理还有窗口底部的状态字符串标签。
# 所以必须为两者上锁
# Holds the image frame received from the drone and later processed by the GUI
self.image = None
self.imageLock = Lock() self.tags = []
self.tagLock = Lock() # Holds the status message to be displayed on the next GUI update
self.statusMessage = '' # Tracks whether we have received data since the last connection check
# This works because data comes in at 50Hz but we're checking for a connection at 4Hz
self.communicationSinceTimer = False
self.connected = False # 下面的显示线程和重绘线程均按照QTimer设置的时钟频率被调用
# A timer to check whether we're still connected
self.connectionTimer = QtCore.QTimer(self)
self.connectionTimer.timeout.connect(self.ConnectionCallback)
self.connectionTimer.start(CONNECTION_CHECK_PERIOD) # A timer to redraw the GUI
self.redrawTimer = QtCore.QTimer(self)
self.redrawTimer.timeout.connect(self.RedrawCallback)
self.redrawTimer.start(GUI_UPDATE_PERIOD) # 很巧的实现,每隔一个周期,就将状态置为未连接,只有连接上了,才将其置为已连接
# Called every CONNECTION_CHECK_PERIOD ms, if we haven't received anything since the last callback, will assume we are having network troubles and display a message in the status bar
def ConnectionCallback(self):
self.connected = self.communicationSinceTimer
self.communicationSinceTimer = False # 双重锁。最外一层锁image,里面一层锁tags。这里均是在显示状态下上锁,避免和ros读取数据线程冲突
def RedrawCallback(self):
if self.image is not None:
# We have some issues with locking between the display thread and the ros messaging thread due to the size of the image, so we need to lock the resources
self.imageLock.acquire()
try:
# Convert the ROS image into a QImage which we can display
image = QtGui.QPixmap.fromImage(QtGui.QImage(self.image.data, self.image.width, self.image.height, QtGui.QImage.Format_RGB888))
if len(self.tags) > 0:
self.tagLock.acquire()
try:
painter = QtGui.QPainter()
painter.begin(image)
painter.setPen(QtGui.QColor(0,255,0))
painter.setBrush(QtGui.QColor(0,255,0))
for (x,y,d) in self.tags:
r = QtCore.QRectF((x*image.width())/1000-DETECT_RADIUS,(y*image.height())/1000-DETECT_RADIUS,DETECT_RADIUS*2,DETECT_RADIUS*2)
painter.drawEllipse(r)
painter.drawText((x*image.width())/1000+DETECT_RADIUS,(y*image.height())/1000-DETECT_RADIUS,str(d/100)[0:4]+'m')
painter.end()
finally:
self.tagLock.release()
finally:
self.imageLock.release() # We could do more processing (eg OpenCV) here if we wanted to, but for now lets just display the window.
self.resize(image.width(),image.height())
self.imageBox.setPixmap(image) # Update the status bar to show the current drone status & battery level
self.statusBar().showMessage(self.statusMessage if self.connected else self.DisconnectedMessage) # 读取数据,对image 和 tag 上锁,避免与显示线程冲突
def ReceiveImage(self,data):
# Indicate that new data has been received (thus we are connected)
self.communicationSinceTimer = True # We have some issues with locking between the GUI update thread and the ROS messaging thread due to the size of the image, so we need to lock the resources
self.imageLock.acquire()
try:
self.image = data # Save the ros image for processing by the display thread
finally:
self.imageLock.release() def ReceiveNavdata(self,navdata):
# Indicate that new data has been received (thus we are connected)
self.communicationSinceTimer = True # Update the message to be displayed
msg = self.StatusMessages[navdata.state] if navdata.state in self.StatusMessages else self.UnknownMessage
self.statusMessage = '{} (Battery: {}%)'.format(msg,int(navdata.batteryPercent)) self.tagLock.acquire()
try:
if navdata.tags_count > 0:
self.tags = [(navdata.tags_xc[i],navdata.tags_yc[i],navdata.tags_distance[i]) for i in range(0,navdata.tags_count)]
else:
self.tags = []
finally:
self.tagLock.release() if __name__=='__main__':
import sys
rospy.init_node('ardrone_video_display')
app = QtGui.QApplication(sys.argv)
display = DroneVideoDisplay()
display.show()
status = app.exec_()
rospy.signal_shutdown('Great Flying!')
sys.exit(status)
#!/usr/bin/env python # The Keyboard Controller Node for the tutorial "Up and flying with the AR.Drone and ROS | Getting Started"
# https://github.com/mikehamer/ardrone_tutorials # This controller extends the base DroneVideoDisplay class, adding a keypress handler to enable keyboard control of the drone # Import the ROS libraries, and load the manifest file which through <depend package=... /> will give us access to the project dependencies
import roslib; roslib.load_manifest('ardrone_tutorials')
import rospy # Load the DroneController class, which handles interactions with the drone, and the DroneVideoDisplay class, which handles video display
from drone_controller import BasicDroneController
from drone_video_display import DroneVideoDisplay # Finally the GUI libraries
from PySide import QtCore, QtGui # 键盘映射,为了更好的可读性
# Here we define the keyboard map for our controller (note that python has no enums, so we use a class)
class KeyMapping(object):
PitchForward = QtCore.Qt.Key.Key_E
PitchBackward = QtCore.Qt.Key.Key_D
RollLeft = QtCore.Qt.Key.Key_S
RollRight = QtCore.Qt.Key.Key_F
YawLeft = QtCore.Qt.Key.Key_W
YawRight = QtCore.Qt.Key.Key_R
IncreaseAltitude = QtCore.Qt.Key.Key_Q
DecreaseAltitude = QtCore.Qt.Key.Key_A
Takeoff = QtCore.Qt.Key.Key_Y
Land = QtCore.Qt.Key.Key_H
Emergency = QtCore.Qt.Key.Key_Space # 继承于DroneVideDisplay类
# 个人觉着,但从实现上而言,不用继承于DroneVideoDisplay.只需继承QMainWindow就好
# 但是这里是需要在显示的同时进行操作,也就是说,同一个mainwindow将接受键盘事件和显示图像。
# 父类的函数在不同层级的子类被override,interesting.
# Our controller definition, note that we extend the DroneVideoDisplay class
class KeyboardController(DroneVideoDisplay):
def __init__(self):
# 初始化基类
super(KeyboardController,self).__init__() self.pitch = 0
self.roll = 0
self.yaw_velocity = 0
self.z_velocity = 0 # 这里的keyPressEvent是一个override函数,因为该类的父类的父类是QMainWindow.此类中有方法keyPressEvent.所以这里必须要实现自己的版本
# We add a keyboard handler to the DroneVideoDisplay to react to keypresses
def keyPressEvent(self, event):
key = event.key() # 此处的controller实则为全局变量,是BasicDroneController的对象,可访问,
# 但我觉着可以尝试将BasicDroneController作为KeyboardController的成员变量会更好
# 或者直接多继承BasicDroneController
# If we have constructed the drone controller and the key is not generated from an auto-repeating key
if controller is not None and not event.isAutoRepeat():
# Handle the important cases first!
if key == KeyMapping.Emergency:
controller.SendEmergency()
elif key == KeyMapping.Takeoff:
controller.SendTakeoff()
elif key == KeyMapping.Land:
controller.SendLand()
else:
# Now we handle moving, notice that this section is the opposite (+=) of the keyrelease section
if key == KeyMapping.YawLeft:
self.yaw_velocity += 1
elif key == KeyMapping.YawRight:
self.yaw_velocity += -1 elif key == KeyMapping.PitchForward:
self.pitch += 1
elif key == KeyMapping.PitchBackward:
self.pitch += -1 elif key == KeyMapping.RollLeft:
self.roll += 1
elif key == KeyMapping.RollRight:
self.roll += -1 elif key == KeyMapping.IncreaseAltitude:
self.z_velocity += 1
elif key == KeyMapping.DecreaseAltitude:
self.z_velocity += -1 # finally we set the command to be sent. The controller handles sending this at regular intervals
controller.SetCommand(self.roll, self.pitch, self.yaw_velocity, self.z_velocity) def keyReleaseEvent(self,event):
key = event.key() # If we have constructed the drone controller and the key is not generated from an auto-repeating key
if controller is not None and not event.isAutoRepeat():
# Note that we don't handle the release of emergency/takeoff/landing keys here, there is no need.
# Now we handle moving, notice that this section is the opposite (-=) of the keypress section
if key == KeyMapping.YawLeft:
self.yaw_velocity -= 1
elif key == KeyMapping.YawRight:
self.yaw_velocity -= -1 elif key == KeyMapping.PitchForward:
self.pitch -= 1
elif key == KeyMapping.PitchBackward:
self.pitch -= -1 elif key == KeyMapping.RollLeft:
self.roll -= 1
elif key == KeyMapping.RollRight:
self.roll -= -1 elif key == KeyMapping.IncreaseAltitude:
self.z_velocity -= 1
elif key == KeyMapping.DecreaseAltitude:
self.z_velocity -= -1 # finally we set the command to be sent. The controller handles sending this at regular intervals
controller.SetCommand(self.roll, self.pitch, self.yaw_velocity, self.z_velocity) # Setup the application
if __name__=='__main__':
import sys
# Firstly we setup a ros node, so that we can communicate with the other packages
rospy.init_node('ardrone_keyboard_controller') # Now we construct our Qt Application and associated controllers and windows
app = QtGui.QApplication(sys.argv)
# 此处,display将会显示图像,同时接受键盘事件
controller = BasicDroneController()
display = KeyboardController() display.show() # executes the QT application
status = app.exec_() # and only progresses to here once the application has been shutdown
rospy.signal_shutdown('Great Flying!')
sys.exit(status)
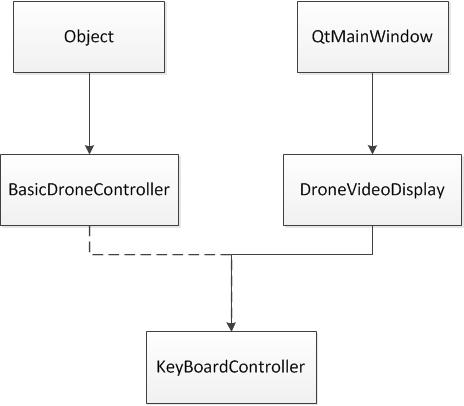
整个程序的架构图如下
基于python的ardrone control源码分析与心得的更多相关文章
- Java集合基于JDK1.8的LinkedList源码分析
上篇我们分析了ArrayList的底层实现,知道了ArrayList底层是基于数组实现的,因此具有查找修改快而插入删除慢的特点.本篇介绍的LinkedList是List接口的另一种实现,它的底层是基于 ...
- 基于Linux平台的libpcap源码分析和优化
目录 1..... libpcap简介... 1 2..... libpcap捕包过程... 2 2.1 数据包基本捕包流程... 2 2.2 libpcap捕包过程... ...
- Java -- 基于JDK1.8的LinkedList源码分析
1,上周末我们一起分析了ArrayList的源码并进行了一些总结,因为最近在看Collection这一块的东西,下面的图也是大致的总结了Collection里面重要的接口和类,如果没有意外的话后面基本 ...
- Java集合基于JDK1.8的ArrayList源码分析
本篇分析ArrayList的源码,在分析之前先跟大家谈一谈数组.数组可能是我们最早接触到的数据结构之一,它是在内存中划分出一块连续的地址空间用来进行元素的存储,由于它直接操作内存,所以数组的性能要比集 ...
- 基于ReentrantLock的AQS的源码分析(独占、非中断、不超时部分)
刚刚看完了并发实践这本书,算是理论具备了,看到了AQS的介绍,再看看源码,发现要想把并发理解透还是很难得,花了几个小时细分析了一下把可能出现的场景尽可能的往代码中去套,还是有些收获,但是真的很费脑,还 ...
- 基于XMPP协议的aSmack源码分析
在研究如何实现Pushing功能期间,收集了很多关于Pushing的资料,其中有一个androidnp开源项目用的人比较多,但是由于长时间没有什么人去维护,听说bug的几率挺多的,为了以后自己的产品稳 ...
- Java -- 基于JDK1.8的ThreadLocal源码分析
1,最近在做一个需求的时候需要对外部暴露一个值得应用 ,一般来说直接写个单例,将这个成员变量的值暴露出去就ok了,但是当时突然灵机一动(现在回想是个多余的想法),想到handle源码里面有使用过Th ...
- 基于jdk1.8的ArrayList源码分析
前言ArrayList作为一个常用的集合类,这次我们简单的根据源码来看看AarryList是如何使用的. ArrayList拥有的成员变量 public class ArrayList<E> ...
- Java -- 基于JDK1.8的ArrayList源码分析
1,前言 很久没有写博客了,很想念大家,18年都快过完了,才开始写第一篇,争取后面每周写点,权当是记录,因为最近在看JDK的Collection,而且ArrayList源码这一块也经常被面试官问道,所 ...
随机推荐
- 第一步:Java开发环境的配置
一.下载JDK 下载地址:www.oracle.com.如下图: 二.配置JDK 安装JDK一直点击下一步就可以,默认是安装在C盘里.如下图: 然后配置系统路径(主要目的是方便开发),参考地址:jin ...
- Laravel5.5配置使用redis
1.安装redis linux上redis的安装与配置 2.安装redis客户端 composer require predis/predis或者安装 PhpRedis PHP 扩展brew inst ...
- python 如何放心干净的卸载模块
windows系统: C:\selenium-2.43.0>python setup.py install --record ./record.txt C:\selenium-2.43.0> ...
- spoj - Longest Common Substring(后缀自动机模板题)
Longest Common Substring 题意 求两个串的最长公共子串. 分析 第一个串建后缀自动机,第二个串在自动机上跑,对于自动机上的结点(状态)而言,它所代表的最大长度为根结点到当前结点 ...
- python aiohttp sancio 框架性能测试
开头先啰嗦两句: 由于本人有开发一个博客的打算,所以近期开始选型python的web框架重头学习,选了两款非常火的 aio web框架 aiohttp 和 sancio 进行性能测试以及开发喜好的调研 ...
- duboo服务使用thrift协议 + MQ
写一篇博客来记录从 Python 转型到 Java 的学习成果.整体架构: rpc: dubbo + thrift idl: thrift registeration: zookeeper MQ: k ...
- ba resme
Resume Name: Zhou Heng Gender: Male Email : jackyzhouheng@gmail.com Self Assessment: I have more tha ...
- 1.3(Spring MVC学习笔记)数据绑定
一.数据绑定介绍 用户发送过来的数据,只有传递到服务器端的参数上才会起作用. 比如用户输入的用户名和密码要和后台方法中代表用户名和密码的变量关联起来, 从而才能使用用户传递的数据进行一些操作,这样数据 ...
- eth0: ERROR while getting interface flags: No such device
出现这个问题有两种原因: 虚拟机设置中没有添加对应的网卡 更改了虚拟机中网卡的MAC,但是Debian 的缓存中将eth0与上次的MAC对应 解决方法: 这里仅就第二种问题提出解决方案: 删除/etc ...
- ios View之间的切换 屏幕旋转
6.3 View之间的切换 在上面的练习中我们通过移动组件的位置和调整组件的大小来处理横向与纵向的界面布局.但是在界面中有很多组件的时候,对每个组件都进行这样的操作确实是一个麻烦的事情.下面我们看看 ...