Convolutional Neural Networks for Visual Recognition 8
Convolutional Neural Networks (CNNs / ConvNets)
前面做了如此漫长的铺垫,现在终于来到了课程的重点。Convolutional Neural Networks, 简称CNN,与之前介绍的一般的神经网络类似,CNN同样是由可以学习的权值与偏移量构成,每一个神经元接收一些输入,做点积运算加上偏移量,然后选择性的通过一些非线性函数,整个网络最终还是表示成一个可导的loss function,网络的起始端是输入图像,网络的终端是每一类的预测值,通过一个full connected层,最后这些预测值会表示成SVM或者Softmax的loss function,在一般神经网络里用到的技巧在CNN中都同样适用。
那么,CNN与普通的神经网络相比,又有哪些变化呢?CNN的网络结构可以直接处理图像,换句话说CNN的输入就是直接假设为图像,这一点有助于我们设计出具备某些特性的网络结构,同时前向传递函数可以更加高效地实现,并且将网络的参数大大减少。
Architecture Overview
前面介绍的普通的神经网络,我们知道该网络接收一个输入,通过一系列的隐含层进行变换,每个隐含层都是由一些神经元组成,每一个神经元都会和前一层的所有神经元连接,这种连接方式称为 full connected,每一层的神经元的激励函数都是相互独立,没有任何共享。最后一个full connected层称为输出层,在分类问题中,它表示每一类的score。
一般来说,普通的神经网络不能很好地扩展到处理图像,特别是高维图像,因为神经元的连接是full connected的方式,导致一般的神经网络处理大图像的时候将会引入海量的参数,而这样很容易造成overfitting。
而CNN,利用了输入是图像这一事实,他们用一种更加明智的方法来设计网络结构,具体说来,不像普通的神经网络,CNN中的每一层的神经元被排列成一个三维模型:拥有width,height以及depth。这里的depth指的是CNN每一层的纵深,并非指整个CNN结构的纵深。比如,对于CIFAR-10数据库来说,输入是一个三维的volume,32×32×3,分别对应width,height和depth,我们将会看到,CNN中,每一层的神经元只跟前一层的部分神经元相连,而没有full connected,而且最后的输出层是一个1×1×10的volume,因为最后一层表示每一类的score,CNN通过这种结构,将一个输入的图像最后转化成一个表示每一类score的向量,下图给出了两种神经网络的示意图:
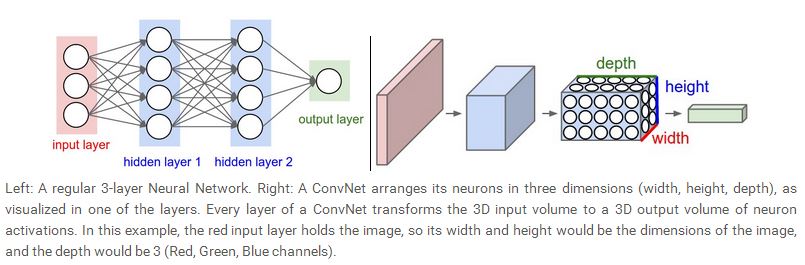
上图左边是一般的神经网络,这个网络有两个隐含层,右边是CNN,将每一层的神经元排列成一个三维的volume,可以将3D的输入volume转化为3D的输出volume.
Layers used to build ConvNets
上一节已经提到,CNN的每一层都将某种输入通过某些可导函数转化为另一种输出,一般来说,我们主要利用三种类型的layer去构建一个CNN,这三种类型的layer分别是convolutional layer, pooling layer 以及full connected layer,这三种类型的layer通过组合叠加从而组成一个完整的CNN网络。我们先来看一个简单的例子,以CIFAR-10数据库为例,我们要设计一个CNN网络对CIFRA-10进行分类,那么一个可能的简单结构是:[INPUT-CONV-RELU-POOL-FC],其中:
INPUT:[32×32×3] 表示输入层,是图像的像素值,这种情况下表示图像是宽为32个像素,高为32个像素,并且有R,G,B三个通道。
CONV: 是卷积层,计算输入层的局部神经元与连接到CONV层神经元的连接系数的点积,如果假设depth是12的话,那么可能的输出就是[32×32×12]。
POOL: 这一层主要执行降采样的功能,可能的输出为[16×16×12]。
FC: 这一层计算最终的每一类的score,输出为[1×1×10]。与普通的神经网络一样,这一层的神经元与上一层的所有神经元都会连接。
所以,利用这种结构,CNN通过一层一层的传递作用,将原始的图像最后映射到每一类的score。我们可以看到,有些层有参数,有些层没有参数。特别地,CONV/FC层不仅仅只是通过激励函数做转化,而且参数(权值,偏移量)也起到非常重要的作用,另一方面,POOL/RELU 层只是固定的函数在起作用,并没有涉及到参数,CONV/FC层的参数将通过梯度下降的方法训练得到,使得训练样本的预测值与目标值吻合。
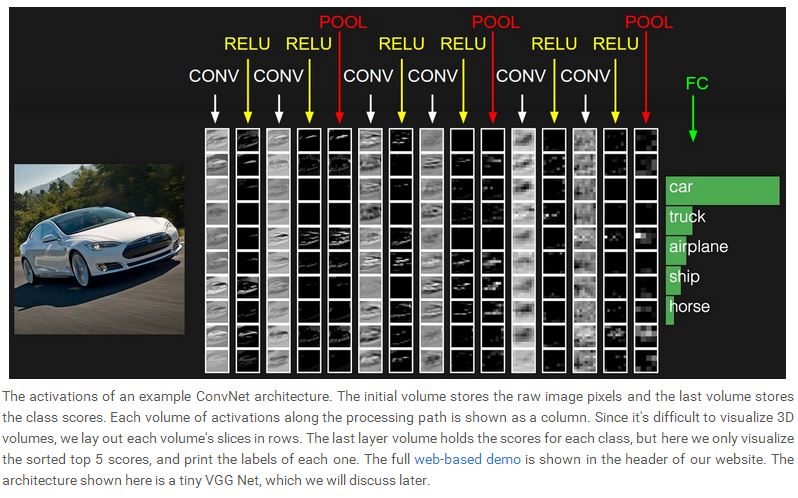
下图给出了一个典型的CNN结构。
总之,CNN可以总结如下:
1):一个CNN结构是由一系列的执行不同转化功能的layers组成的,将输入的原始图像映射到最后的score。
2):整个网络结构,只有少数几类不同功能的layer (CONV/FC/RELU/POOL 是目前比较流行的几种)。
3):每一层都接收一个3-D的数据体,最后也会输出一个3-D的数据体。
4):有些层有参数(CONV/FC),有些层没有(RELU/POOL)。
5):有些层还可能有hyperparameters(CONV/POOL/FC),有些层则没有(RELU)。
接下来,我们要描述每一类layer的作用,以及相关的参数。
Convolutional Layer
Conv layer是CNN网络的核心部件,它的输出可以看成是一个3-D的数据体,CONV 层包含一系列可学的filters,这些filter的尺寸都很小,但是可以扩展到input的整个depth,前向传递的时候,filter在输入图像上滑动,产生一个2-D的关于filter的激励映射,filter只会和局部的一些像素(神经元)做点积,所以每一个输出的神经元可以看成是对输入层的局部神经元的激励,我们希望这些filter通过训练,可以提取某些有用的局部信息。我们接下来探讨到更加详细的细节。
当输入是高维的变量,比如图像等,如果采用full connected的连接是不切实际的,相反,我们会采用局部连接的方式,那么每一个局部区域我们称为receptive field,这种局部连接是针对输入层的宽,高这两个维度来说,但是对于第三个维度depth来说,依然是要完全连接,所以我们处理局部空间在宽,高维度与depth这个维度是不一样的。宽,高维度上,我们采取局部连接,但是对于depth维度,我们采用全连方式。
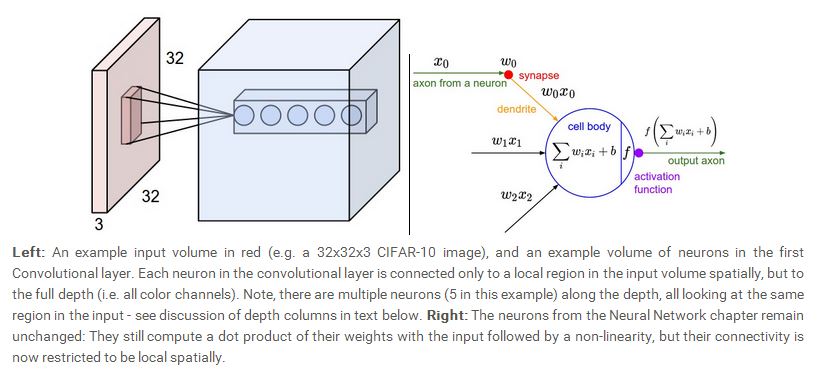
比如,如果一个输入图像的尺寸是[32×32×3],我们定义下一层神经元的receptive field的尺寸是5×5,那么考虑到depth这个维度,最终每一次都有5×5×3=75个神经元与CONV层的一个神经元连接,意味着有5×5×3=75个权值。
再比如,假设现在有一个输入的数据体是16×16×20,那么如果定义一个receptive field为3×3的连接方法,那么在CONV层的每一个神经元最终连接到上一层神经元的个数是3×3×20=180。
这两个例子都说明了,在宽,高维度我们采用局部连接的方式,而在depth维度,我们会全部连接。下面给出了一个简单的示意图:
前面我们介绍了CONV层的神经元与前一层的连接方式,但是CONV层本身的神经元如何排列,而且其尺寸如何,我们还没有讨论,事实上,CONV层本身的神经元如何排列以及CONV层的尺寸由三个因素决定:depth,stride,zero padding。
首先,depth决定了CONV层中有多少神经元可以与前一层相同的神经元相连,这个类似普通的神经网络,在普通的神经网络中,我们知道每一个神经元都与上一层的所有神经元相连,所有每一层的所有神经元都是与上一层相同的神经元相连。我们将会看到,所有这些神经元将通过学习从而对输入的不同特征产生应激作用,比如,如果第一个CONV层接收的是原始输入图像,那么沿着depth维度排列的神经元(注意:这些神经元连接的输入层的神经元都相同)可能对不同的特性(比如边界,颜色,斑块)等产生激励。我们将这些连接到输入层同一区域的神经元称为一个depth volume。
接下来,我们必须指定stride,这个决定了我们如何在CONV层排列depth volume,如果我们指定stride为1,那么depth volume的排列将会非常紧凑,意味着隔一个神经元就会有一个depth volume,这样会产生比较大的重叠,而且输出的尺寸也会很大,如果我们增大stride,可以减少重叠,并且可以减少输出的尺寸。
zero padding就是为了控制输出的尺寸,对输入图像的边缘进行补零操作,因为卷积可能使输出图像的尺寸减少,有的时候为了得到与输入一样的尺寸,我们可以在做卷积之前先对输入图像的边缘补零,即先增大输入图像的尺寸,这样可以使得最终的卷积结果与补零前的输入图像的尺寸一致。
我们可以看到,输出层有一个depth,一个spatial size,depth可以指定,spatial size与输入层的size(W),receptive field的size,即filter的size(F),我们定义的stride(S),还有边缘的zero padding的size(P)有关,可以看成是这些变量的一个函数,我们可以证明最终输出的spatial size为:(W−F+2P)/S+1。
我们可以看一个例子,如果输入图像的尺寸为[227×227×3],我们设计一个CONV层,每个神经元的receptive field为11,即F=11,stride为S=4,没有zero padding,那么输出的CONV层的spatial size为(227−11)/4+1=55,如果我们定义CONV层的depth为96,那么这个CONV层的最终尺寸为55×55×96, 从上面这个定义看出,这55×55×96个神经元中的每一个都和输入图像的一个11×11×3的局部区域相连,并且每一个depth volume中含有96个神经元,这96个神经元与输入图像的同一个11×11×3的局部区域相连,它们唯一的区别在于连接权值的不同。
继续看上面的例子,我们知道CONV层有55×55×96=29040个神经元,每个神经元都与输入层的11×11×3个神经元连接,那么CONV层的每一个神经元都将有11×11×3=363个权值外加一个bias,那么最终的系数将会达到29040×(363+1)=105,705,600。很明显,这个系数量太大了。
我们可以利用一个合理的假设来大大系数的数量,我们将CONV层看成一个depth volume,比如上面这个例子,CONV层是一个55×55×96的volume,其depth为96,那么每一个55×55的排列可以看成是一个slice,那么这个CONV层有96个slices,每一个slice的尺寸都为55×55,我们让每一个slice里的神经元都共享一组同样的连接系数,或者说同样的filter,那么意味着每一个slice都只有11×11×3个不同的系数,整个CONV层将只有11×11×3×96=34848,如果每个slice的神经元也共享同样的bias,那么最终的系数为34848+96=34944个,我们看到,通过这种假设,系数的总量大大减少了,每一个slice里的55×55个神经元都共享同样的连接系数,实际运算中,所有的神经元都会计算相应的梯度,但是这些梯度最终会相加,在每一个slice中只做一次更新。
如果每一个slice里的神经元都共享同样的连接系数,那么实际运算的时候可以利用卷积运算,其实这也是这个网络名称的由来,卷积在其中发挥重要的作用,所有我们有的时候把这些系数称为filter或者kernel,卷积的结果就是activation map,每一个activation map叠加,最后形成一个55×55×96的volume。
总结一下CONV的特点:
接收一个尺寸为W1×H1×D1的volume。
定义一些相关的hyperparameter,比如filter的个数K,filter的size或者称为receptive fieldF,stride S以及zero padding P,通过运算可以得到一个如下的
尺寸为:W2×H2×D2的depth volume,其中,W2=(W1−F+2P)/S+1,H2=(H1−F+2P)/S+1,D2=K,通过参数共享,每个slice
会有一个F⋅F⋅D1的kernel,一共有K个kernel,所以一共有系数(F⋅F⋅D1)⋅K,在输出的数据体中,每一个slice的尺寸都是W2×H2,一共有D2=K个slice。
CONV层的backpropagation 同样是卷积运算,这个具体的细节留到后面详细探讨。
Pooling Layer
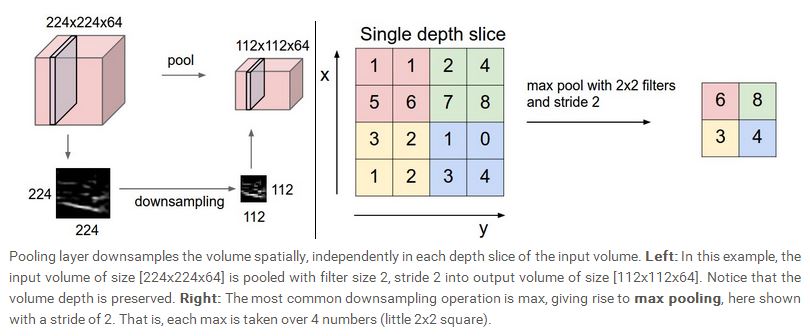
一般来说,在两个CONV layer之间,会插入一共pooling layer,pooling layer的作用一个是减少输入的空间尺寸,从而可以降低参数的数量及运算量,同时也可以控制overfitting。Pooling layer与上一层的每一个slice是一一对应的,没有相互交叉。最常见的pooling 运算是采用max 操作,在2×2的一个空间区域内,以stride为2进行将采样,pooling操作只在宽,高维度上进行,所以不会改变depth,输出与输入的depth将会一样。总结来说,Pooling layer:
接收一个尺寸为W1×H1×D1的volume。定义一些相关的hyperparameter,filter的size或者称为receptive fieldF,stride S,通过运算可以得到一个如下的尺寸为:W2×H2×D2的depth volume,其中,W2=(W1−F)/S+1,H2=(H1−F)/S+1,D2=D1,pooling layer不会又系数,也不会使用zero padding。下图给了一个pooling的示意图:
max pooling 的backpropagation,简单来说就是只对输入的最大值进行梯度运算,所以每次前向运算的时候,最好可以将最大值的位置记录下来,这样每次backward的时候就可以方便运算。
Full-connected Layer
FC layer就像普通神经网络里的隐含层一样,FC layer中的每一个神经元与上一层所有的神经元都会连接(full connected),涉及到的运算也和普通的神经网络一样。值得注意的一点是,FC与CONV layer之间的区别仅在于CONV layer里的神经元只和上一层的局部神经元相连,但是两者的运算模式是一样的,都是做点积,因此在FC与CONV之间存在相互转换的可能。
对于CONV layer,如果我们从FC的角度来看,相当于乘了一个非常大的稀疏矩阵(大部分系数为0,因为只有局部神经元的连接是有效的),而且这些非0系数在某些block中是相等的(系数共享)。反过来,任何FC layer也可以有效地转换成CONV layer,比如一个神经元个数K=4096的FC layer,接收的输入是7×7×512,我们可以等同于利用一个CONV层其hyperparameter设定为 F=7, P=0, S=1, K=4096,我们设定filter的spatial size与输入的spatial size是一样的,这样最后会得到一个1×1×4096的输出。
上面所说的两种转换,其中FC 转换为CONV 在实际运算中非常有用,考虑一个实际的CNN网络,最原始的输入为224×224×3的图像,经过一系列的转换运算,我们得到了一个尺寸为7×7×512的volume,接下来我们用两个FC layer,将这个volume转换为尺寸为4096的volume,最后连接到size为1000的输出,我们可以将这三个FC layer用CONV layer的运算模式来表示。
将第一个FC layer替换成CONV layer,其filter size 为7,我们可以得到1×1×4096的输出。将第二个FC layer替换成CONV layer,其filter size 为1,输出的volume为1×1×4096。同样,最后一个FC layer用filter size为1的CONV layer替换,最后的输出为1×1×1000。
上面所说的每一个转换都涉及到系数矩阵的reshape问题,这种转换可以让我们将CNN结构非常有效的在更大的图像上滑动。比如,如果一个224×224的图像生成了一个尺寸为7×7×512的volume,从224降到7,一共降了32倍,那么,如果输入的图像是384×384,那么我们会生成一个12×12×512的volume,那么我们利用这三层FC layer,转换成CONV layer,我们最终会得到6×6×1000的输出,意味着每一类的score不只是一个数,而是一个6×6的数组。
我们可以看到,如果图像保持不动,而CNN网络每次以32个像素的stride在图像上移动,最后得到的结果是一样的。
一般来说,利用CNN网络做一次遍历,得到一个6×6的score,比重复调用CNN结构36次计算其在图像不同位置之间的score要更加高效,因为这36次调用使用的是同一个网络结构,共享完全一样的系数及运算模式。这种实际应用中,是一种提高分类性能的技巧,比如我们将一幅图先放大,然后再利用CNN结构做遍历,最后将所有得到的score求平均。
最后一点,如果我们想将CNN网络以小于32的stride有效地应用在图像上,可以通过多次前向传递运算达到目的。比如,我们想以16个像素的stride遍历图像,可以做两次运算,第一次是直接将CNN网络在原图上做遍历,第二次,先将原图在宽,高方向分别平移16个像素,然后在平移后的图像上做遍历。
ConvNet Architectures
我们已经看到,CNN网络一般只有几种类型的layer:CONV,POOL(一般默认为max pooling)以及FC,一般我们也会把RELU单独列为一层,用来执行非线性运算的操作,我们看看这些layer如何构建一个完整的CNN网络。
比较常见的模式是先叠加几层CONV-RELU layer,后面连上POOL layer,这样将输入的图像逐渐减少到一个比较小的尺寸,接来下,就连上Full connected layer,最后的FC layer是输出,所以一般比较常见的模式如下所示:
INPUT -> [[CONV -> RELU]*N -> POOL?]*M -> [FC -> RELU]*K -> FC
其中*表示重复叠加的意思,而POOL?表示这是可选择的,而且N>=0,一般N<=3,M>=0,K>=0,通常K<=3,下面是一些常见的CNN网络结构。
INPUT -> FC,这是最普通的线性分类器,N = M = K = 0.
INPUT -> CONV -> RELU -> FC
INPUT -> [CONV -> RELU -> POOL]*2 -> FC -> RELU -> FC 我们看到CONV layer后面连着Pool layer。
INPUT -> [CONV -> RELU -> CONV -> RELU -> POOL]*3 -> [FC -> RELU]*2 -> FC 我们看到在连接POOL layer之前,已经有两个CONV layer叠加到一起了。
一般我们会选择小尺寸的filter,这在实际应用中的效果会更好。一般来说,输入图像的尺寸最好是2的幂次方,比如32,64,96,224,384以及512。CONV 层一般用比较小的filter,比如3×3或者5×5,stride一般设为1,为了让卷积运算之后图像的尺寸保持不变,有的时候会引入zero padding,zero padding的大小一般为P=(F-1)/2,pool layer执行降采样的功能,最常见的pool是用max pooling,在一个2×2的区域内,这样相当于将图像缩小一半,在设计CNN网络的时候,对于这些参数要小心设定,要确保每个layer的输出尺寸与设想的一致。
现在流行的CNN网络结构都是非常庞大的,比较著名的CNN结构有如下几个LeNet, AlexNet, ZF Net, Google Net, VGGNet,具体的介绍可以参考课程网站。这里不再详述。
声明:lecture notes里的图片都来源于该课程的网站,只能用于学习,请勿作其它用途,如需转载,请说明该课程为引用来源。
Convolutional Neural Networks for Visual Recognition 8的更多相关文章
- Convolutional Neural Networks for Visual Recognition 1
Introduction 这是斯坦福计算机视觉大牛李菲菲最新开设的一门关于deep learning在计算机视觉领域的相关应用的课程.这个课程重点介绍了deep learning里的一种比较流行的模型 ...
- Convolutional Neural Networks for Visual Recognition
http://cs231n.github.io/ 里面有很多相当好的文章 http://cs231n.github.io/convolutional-networks/ Table of Cont ...
- 卷积神经网络用于视觉识别Convolutional Neural Networks for Visual Recognition
Table of Contents: Architecture Overview ConvNet Layers Convolutional Layer Pooling Layer Normalizat ...
- Convolutional Neural Networks for Visual Recognition 5
Setting up the data and the model 前面我们介绍了一个神经元的模型,通过一个激励函数将高维的输入域权值的点积转化为一个单一的输出,而神经网络就是将神经元排列到每一层,形 ...
- Convolutional Neural Networks for Visual Recognition 2
Linear Classification 在上一讲里,我们介绍了图像分类问题以及一个简单的分类模型K-NN模型,我们已经知道K-NN的模型有几个严重的缺陷,第一就是要保存训练集里的所有样本,这个比较 ...
- Convolutional Neural Networks for Visual Recognition 7
Two Simple Examples softmax classifier 后,我们介绍两个简单的例子,一个是线性分类器,一个是神经网络.由于网上的讲义给出的都是代码,我们这里用公式来进行推导.首先 ...
- Convolutional Neural Networks for Visual Recognition 4
Modeling one neuron 下面我们开始介绍神经网络,我们先从最简单的一个神经元的情况开始,一个简单的神经元包括输入,激励函数以及输出.如下图所示: 一个神经元类似一个线性分类器,如果激励 ...
- cs231n spring 2017 lecture1 Introduction to Convolutional Neural Networks for Visual Recognition 听课笔记
1. 生物学家做实验发现脑皮层对简单的结构比如角.边有反应,而通过复杂的神经元传递,这些简单的结构最终帮助生物体有了更复杂的视觉系统.1970年David Marr提出的视觉处理流程遵循这样的原则,拿 ...
- Stanford CS231n - Convolutional Neural Networks for Visual Recognition
网易云课堂上有汉化的视频:http://study.163.com/course/courseLearn.htm?courseId=1003223001#/learn/video?lessonId=1 ...
随机推荐
- Android hellocharts 柱形图详解
近日需要做图表结构的项目,目前最火的就是hellocharts 和MPAndroidChart 相对来说hellocharts集成比较简单: 官网地址 https://github.com/l ...
- springmvc demo
[说明]今天上午稍稍偏了一下方向,看了看servlet的相关知识,下午做maven+spring+springMVC的整合,晚上成功实现了一个小demo(可以在jsp动态页面上获得通过地址栏输入的参数 ...
- Java 学习 day09
01-面向对象(内部类访问规则) package myFirstCode; /* 内部类的访问规则: 1. 内部类可以直接访问外部类的成员,包括私有private. 之所以可以直接访问外部类中的成员, ...
- vim对光标所在的数字进行增减
真是vim会在不经意间给你惊喜...... 现在发现把光标移到某数字的上方,c-a是加1, c-x是减1 当时真有点众里寻他千百度的感觉
- 【python】-- 元组、字典
元组 元组其实跟列表差不多,也是存一组数,只不是它一旦创建,便不能再修改,所以又叫只读列表 用途:一般情况下用于自己写的程序能存下数据,但是又希望这些数据不会被改变,比如:数据库连接信息等 1.访问元 ...
- 我的Android进阶之旅------>FastJson的简介
在最近的工作中,在客户端和服务器通信中,需要采用JSON的方式进行数据传输.简单的参数可以通过手动拼接JSON字符串,但如果请求的参数过多,采用手动拼接JSON字符串,出错率就非常大了.并且工作效率也 ...
- Spring mvc 与 strust
1. 机制:spring mvc的入口是servlet,而struts2是filter 2. 性能:spring会稍微比struts快.spring mvc是基于方法,单例(servlet也是单例): ...
- android ui篇 自己写界面
对于一些较为简单的界面则自己进行写. 在这里就需要了解xml文件中一些基本的属性以及android手机的知识. 一.目前手机屏幕像素密度基本有5种情况.(以下像素密度简称密度) 密度 ldpi mdp ...
- MySQL一些常见查询方式
1.查询端口号命令: show global variables like 'port'; 2.查看版本号: select version(); 3.查看默认安装的MySQL的字符集 show var ...
- activiti--6-------------------------------------连线(一般数据库表的查询顺序)
一.流程图 二.这次把流程图和Java类放在一个包下 三.代码 package com.xingshang.f_sequenceFlow; import java.io.InputStream; im ...