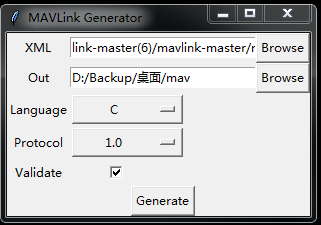
移植mavlink到stm32详细教程,后面附快速移植方法
一:准备材料: mavlink源码 stm32串口程序






// Macro to define packed structures//#ifdef __GNUC__// #define MAVPACKED( __Declaration__ ) __Declaration__ __attribute__((packed))//#else// #define MAVPACKED( __Declaration__ ) __pragma( pack(push, 1) ) __Declaration__ __pragma( pack(pop) )//#endif
#define MAVPACKED( __Declaration__ ) __Declaration__
#pragma anon_unions
#defineinline __INLINE
MAVLINK_HELPER void mavlink_dcm_to_quaternion(constfloat dcm[3][3],float quaternion[4]){int dcm_j,dcm_k;float s;float tr = dcm[0][0]+ dcm[1][1]+ dcm[2][2];if(tr >0.0f){float s = sqrtf(tr +1.0f);quaternion[0]= s *0.5f;s =0.5f/ s;quaternion[1]=(dcm[2][1]- dcm[1][2])* s;quaternion[2]=(dcm[0][2]- dcm[2][0])* s;quaternion[3]=(dcm[1][0]- dcm[0][1])* s;}else{/* Find maximum diagonal element in dcm* store index in dcm_i */int dcm_i =0;int i;for(i =1; i <3; i++){if(dcm[i][i]> dcm[dcm_i][dcm_i]){dcm_i = i;}}dcm_j =(dcm_i +1)%3;dcm_k =(dcm_i +2)%3;s = sqrtf((dcm[dcm_i][dcm_i]- dcm[dcm_j][dcm_j]-dcm[dcm_k][dcm_k])+1.0f);quaternion[dcm_i +1]= s *0.5f;s =0.5f/ s;quaternion[dcm_j +1]=(dcm[dcm_i][dcm_j]+ dcm[dcm_j][dcm_i])* s;quaternion[dcm_k +1]=(dcm[dcm_k][dcm_i]+ dcm[dcm_i][dcm_k])* s;quaternion[0]=(dcm[dcm_k][dcm_j]- dcm[dcm_j][dcm_k])* s;}}
MAVLINK_HELPER uint16_t mavlink_msg_to_send_buffer(uint8_t*buffer,constmavlink_message_t*msg){uint8_t*ck;memcpy(buffer,(constuint8_t*)&msg->magic, MAVLINK_NUM_HEADER_BYTES +(uint16_t)msg->len);ck = buffer +(MAVLINK_NUM_HEADER_BYTES +(uint16_t)msg->len);ck[0]=(uint8_t)(msg->checksum &0xFF);ck[1]=(uint8_t)(msg->checksum >>8);return MAVLINK_NUM_NON_PAYLOAD_BYTES +(uint16_t)msg->len;}
#define_MAV_RETURN_int8_t(msg, wire_offset)(int8_t)_MAV_PAYLOAD(msg)[wire_offset]#define_MAV_RETURN_uint8_t(msg, wire_offset)(uint8_t)_MAV_PAYLOAD(msg)[wire_offset]
/** @file mavlink_avoid_errors.h* @简介:本文件是由王朔添加,用来统一解决mavlink报错信息* @see QQ624668529*/#ifndef MAVLINK_AVOID_ERRORS_H#define MAVLINK_AVOID_ERRORS_H/*解决..\MAVLINK\common\../mavlink_types.h(53): error: #20: identifier "pack" is undefined*/#define MAVPACKED( __Declaration__ ) __Declaration__/*解决..\MAVLINK\common\../mavlink_types.h(53): error: #3092: anonymous unions are only supported in --gnu mode, or when enabled with #pragma anon_unions*/#pragma anon_unions#defineinline __INLINE#ifndef memset//由王朔添加 2018-08-24staticinlinevoid*memset(void*dest,int data,size_t length){uint32_t i;int*point = dest;for(i=0; i<length; i++) point[i]= data;return dest;}#endif#ifndef memcpy//由王朔添加 2018-08-24void*memcpy(void*dest,constvoid*src,size_t n){unsignedchar*pout =(unsignedchar*)dest;unsignedchar*pin =(unsignedchar*)src;while(n-->0)*pout++=*pin++;return dest;}#include"mavlink_types.h"#define MAVLINK_USE_CONVENIENCE_FUNCTIONS#define MAVLINK_SEPARATE_HELPERS//mavlink_system_t mavlink_system = {0,0};mavlink_system_t mavlink_system ={1,1};// System ID, 1-255, Component/Subsystem ID, 1-255void comm_send_ch(mavlink_channel_t chan,uint8_t buf){chan=chan;USART_SendData(USART1, buf);//向串口1发送数据while(USART_GetFlagStatus(USART1,USART_FLAG_TC)!=SET);//等待发送结束}#endif#include"mavlink.h"#include"mavlink_helpers.h"#endif//AVLINK_AVOID_ERRORS_H
#include"sys.h"#include"delay.h"#include"usart.h"#include"led.h"#include"beep.h"#include"key.h"#include"mavlink_avoid_errors.h"//ALIENTEK 探索者STM32F407开发板 实验4//串口通信实验 -库函数版本//技术支持:www.openedv.com//淘宝店铺:http://eboard.taobao.com//广州市星翼电子科技有限公司//作者:正点原子 @ALIENTEKint main(void){mavlink_heartbeat_t packet_in ={963497464,17,84,151,218,3};mavlink_heartbeat_t packet1;memset(&packet1,0,sizeof(packet1));packet1.custom_mode = packet_in.custom_mode;packet1.type = packet_in.type;packet1.autopilot = packet_in.autopilot;packet1.base_mode = packet_in.base_mode;packet1.system_status = packet_in.system_status;packet1.mavlink_version = packet_in.mavlink_version;NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置系统中断优先级分组2delay_init(168);//延时初始化uart_init(115200);//串口初始化波特率为115200LED_Init();//初始化与LED连接的硬件接口while(1){mavlink_msg_heartbeat_send(MAVLINK_COMM_1 , packet1.type , packet1.autopilot , packet1.base_mode , packet1.custom_mode , packet1.system_status );delay_ms(1000);}}
MAVLINK_HELPER void mavlink_dcm_to_quaternion(constfloat dcm[3][3],float quaternion[4]){int dcm_j,dcm_k;float s;float tr = dcm[0][0]+ dcm[1][1]+ dcm[2][2];if(tr >0.0f){float s = sqrtf(tr +1.0f);quaternion[0]= s *0.5f;s =0.5f/ s;quaternion[1]=(dcm[2][1]- dcm[1][2])* s;quaternion[2]=(dcm[0][2]- dcm[2][0])* s;quaternion[3]=(dcm[1][0]- dcm[0][1])* s;}else{/* Find maximum diagonal element in dcm* store index in dcm_i */int dcm_i =0;int i;for(i =1; i <3; i++){if(dcm[i][i]> dcm[dcm_i][dcm_i]){dcm_i = i;}}dcm_j =(dcm_i +1)%3;dcm_k =(dcm_i +2)%3;s = sqrtf((dcm[dcm_i][dcm_i]- dcm[dcm_j][dcm_j]-dcm[dcm_k][dcm_k])+1.0f);quaternion[dcm_i +1]= s *0.5f;s =0.5f/ s;quaternion[dcm_j +1]=(dcm[dcm_i][dcm_j]+ dcm[dcm_j][dcm_i])* s;quaternion[dcm_k +1]=(dcm[dcm_k][dcm_i]+ dcm[dcm_i][dcm_k])* s;quaternion[0]=(dcm[dcm_k][dcm_j]- dcm[dcm_j][dcm_k])* s;}}
MAVLINK_HELPER uint16_t mavlink_msg_to_send_buffer(uint8_t*buffer,constmavlink_message_t*msg){uint8_t*ck;memcpy(buffer,(constuint8_t*)&msg->magic, MAVLINK_NUM_HEADER_BYTES +(uint16_t)msg->len);ck = buffer +(MAVLINK_NUM_HEADER_BYTES +(uint16_t)msg->len);ck[0]=(uint8_t)(msg->checksum &0xFF);ck[1]=(uint8_t)(msg->checksum >>8);return MAVLINK_NUM_NON_PAYLOAD_BYTES +(uint16_t)msg->len;}
// Macro to define packed structures//#ifdef __GNUC__// #define MAVPACKED( __Declaration__ ) __Declaration__ __attribute__((packed))//#else// #define MAVPACKED( __Declaration__ ) __pragma( pack(push, 1) ) __Declaration__ __pragma( pack(pop) )//#endif
#define_MAV_RETURN_int8_t(msg, wire_offset)(int8_t)_MAV_PAYLOAD(msg)[wire_offset]#define_MAV_RETURN_uint8_t(msg, wire_offset)(uint8_t)_MAV_PAYLOAD(msg)[wire_offset]


移植mavlink到stm32详细教程,后面附快速移植方法的更多相关文章
- 移植MAVLINK到STM32详细教程之三
在前面教程的基础上继续移植优化,之前的没有加缓冲区,没有接收函数功能,这里进行统一的讲解 作者:恒久力行 qq:624668529 缓冲区对于接 ...
- 使用Express连接mysql详细教程(附项目的完整代码我放在结尾了)
使用Express连接mysql详细教程(附项目的完整代码我放在结尾了) 要使用Express连接本地数据库 我们首先需要安装好Express的依赖 我们使用这个框架呢首先要有一点ajax的基础 如果 ...
- 面系那个对象开发原则.高内聚.低耦合+Python安装详细教程+print输出带颜色的方法
面系那个对象开发原则.高内聚.低耦合 软件设计中通常用耦合度和内聚度作为衡量模块独立程度的标准.划分摸块的一个准则就是高内聚低耦合. 这是软件工程中的概念,是判断设计好坏的标准,主要是面向OO的设计, ...
- 移植mavlink协议到STM32详细教程
1准备材料, 首先准备一个带串口的stm32程序(这里选用整点原子的官方串口例程这里自己去找不讲)作者:恒久力行 QQ:624668529,然后去mavlink官网下载mavlink源码,这里重点讲解 ...
- [RouterOS] ROS对接碧海威或PA等流控实现完美流控详细教程(附脚本全免费)
前言: 经常在群里看到不少朋友争论海蜘蛛 ROS 维盟 爱快 碧海威 流控大师 Woyos等等软路由,哪个好.实际上,网络产品是复杂的,现在的软路由功能上已经远远不是单独的路由了.每种产品都有他本身的 ...
- SSM(Spring+SpringMVC+Mybatis)框架搭建详细教程【附源代码Demo】
[前言] 应某网络友人邀约,需要一个SSM框架的Demo作为基础学习资料,于是乎,就有了本文.一个从零开始的SSM框架Demo对一个新手来说,是非常重要的,可大大减少在学习过程中遇到的各种各样的坑,说 ...
- Java连接MySQL数据库详细教程(附网盘下载地址)
准备工具 Eclipse-oxygen-64位 http://pan.baidu.com/s/1gf48FIj MySQL-5.7.17 http://pan.baidu.com/s/1skD14Cl ...
- [转]SSM(Spring+SpringMVC+Mybatis)框架搭建详细教程【附源代码Demo】
一.新建项目 运行IDEA,进入初始化界面,然后我们选择新建项目(进入主界面新建项目也是一样的) 在Maven选项卡里面找到对应的java web选项,然后我们点下一步 这一步填入组织等信息,这里比较 ...
- 如何发布一个自定义Node.js模块到NPM(详细步骤,附Git使用方法)
咱们闲话不多说,直接开始! 由于我从没有使用过MAC,所以我不保证本文中介绍的操作与MAC一致. 文章开始我先假定各位已经在window全局安装了Node.js,下面开始进行详细步骤介绍: 本文本着, ...
随机推荐
- 03.generator
generatorConfig.xml自动生成连接数据库的这些个公共类的方法. <?xml version="1.0" encoding="UTF-8" ...
- 07_ddms透视图介绍
通过ADB(Android Debug Bridge)安卓调试桥把你的Eclipse(集成开发环境)和你的设备连接在一起.有时候ADB可能会被其他的东西占用.例如WPS会跟你抢ADB(抢端口).如果你 ...
- Entity Framework Code-First(4):Simple Code First Example
Simple Code First Example: Let's assume that we want to create a simple application for XYZ School. ...
- servlet与filter的加载顺序详解
项目:3个filter,3个servlet,匹配的url路径/hello. 情况1:servlet没加<load-on-startup></load-on-startup>情 ...
- HDU 5974 A Simple Math Problem (解方程)
题意:给定a和b,求一组满足x+y=a && lcm(x, y)=b. 析:x+y = a, lcm(x, y) = b,=>x + y = a, x * y = b * k,其 ...
- POJ 3691 DNA repair (DP+字符串)
题意:给出nn(1≤n≤50,1≤n≤50) 个病毒DNA序列,长度均不超过20.现在给出一个长度不超过1000的字符串,求至少要更换多少个字符, 才能使这个字符串不包含这些DNA序列. 析:利用前缀 ...
- The Knuth-Morris-Pratt Algorithm in my own words(转)
origianl For the past few days, I’ve been reading various explanations of the Knuth-Morris-Pratt str ...
- hdu3078(lca / RMQ在线)
题目链接: http://acm.hdu.edu.cn/showproblem.php?pid=3078 题意: 给出一棵 n 个点的带点权值的树, 接下来有 q 组形如 k, x, y 的输入, 若 ...
- 51nod1064(Bash博弈)
题目链接:https://www.51nod.com/onlineJudge/questionCode.html#!problemId=1067 题意:中文题诶~ 思路:直接规律就好了... 代码: ...
- Windows日志为什么要把它转成Syslog呢?
有的朋友会问,好好的Windows日志为什么要把它转成Syslog呢?呵呵,当Windows服务器比较少的时候,我们是不需要这样做的.但试想如果你管理着成千上百台的Windows机器,你会一台一台的登 ...