Camera | 10.linux驱动 led架构-基于rk3568
前面文章我们简单给大家介绍了如何移植闪光灯芯片sgm3141,该驱动依赖了led子系统和v4l2子系统。
V4L2可以参考前面camera系列文章,本文主要讲述led子系统。
一、LED子系统框架
Linux内核的 led 子系统主要功能:
- 为每个设备在/sys/class/leds下创建不同的文件节点,用于操作led
- 抽象出所有的灯基本操作,设置亮、灭,光强、闪烁等
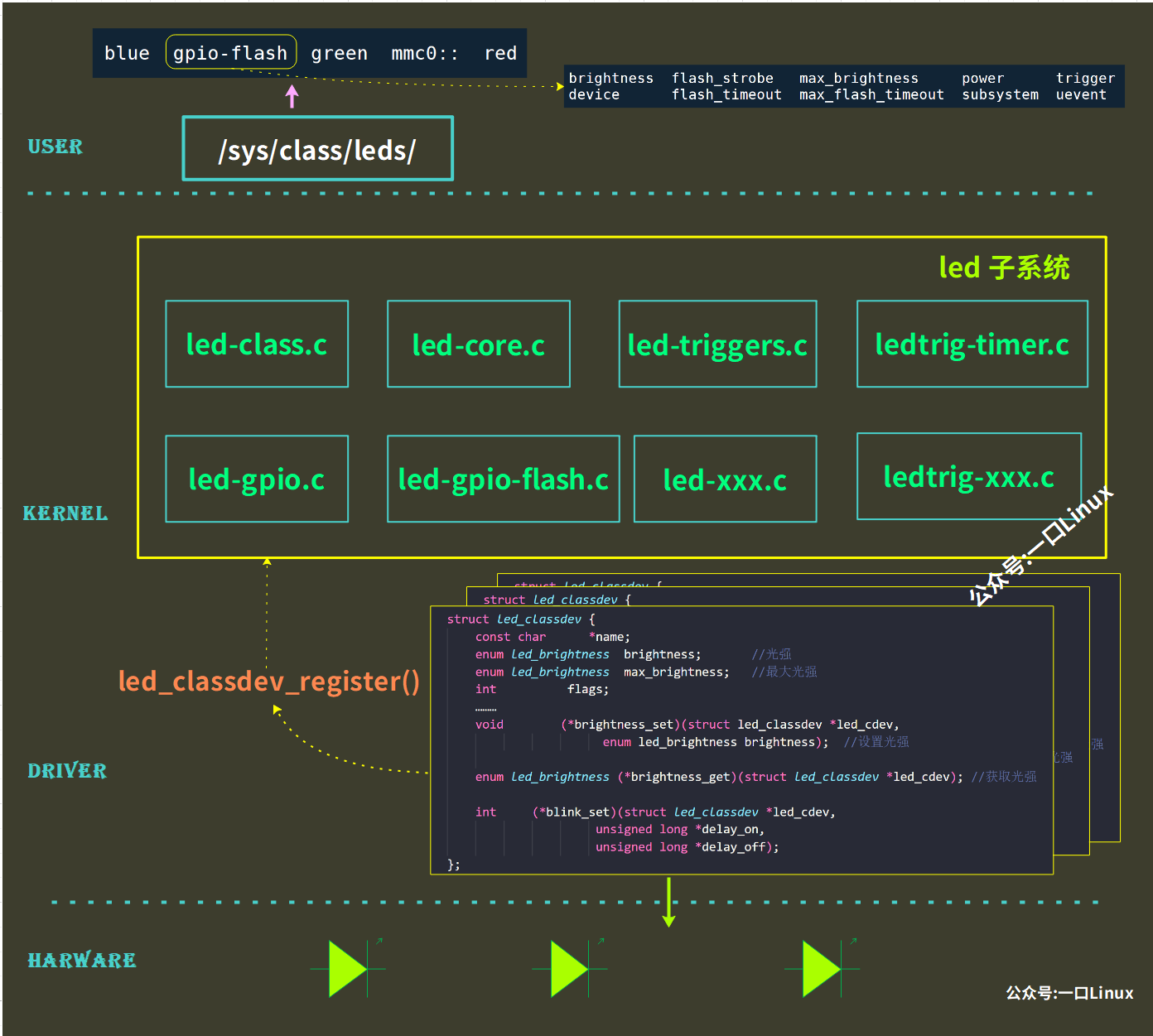
框架所处的位置,正如上图所示,由下往上看:
Hardware:
硬件设备,指的是LED,可以是各种设备上的led灯硬件驱动层:
是直接操作硬件的实现,用于驱动硬件,实现相应的功能,并且将硬件设备注册进框架之中。核心层:
将LED进行统一管理,向下提供注册接口,向上提供统一访问接口,方便用户访问用户层:
用户通过指定的文件节点,能够直接控制LED的亮灭。
不同的led位于不同的外设上,有的可能通过gpio控制,也可能由其他的芯片控制,
有的led只需要控制亮灭,有的需要设置为闪烁,只需要基于架构设置对应的回调函数即可。
二、LED子系统驱动文件
了解完LED子系统框架之后,我们来分析一下其相关的目录结构!
kernel
│ └── driver
│ │ └── leds
│ │ │ ├──Makefile
│ │ │ ├──led-core.c *
│ │ │ ├──led-gpio.c
│ │ │ ├──led-class.c *
│ │ │ ├──led-class-flash.c *
│ │ │ ├──led-triggers.c *
│ │ │ ├──......
│ │ │ └── trigger
│ │ │ │ ├── ledtrig-cpu.c
│ │ │ │ ├── ledtrig-heartbeat.c
│ │ │ │ ├── .......
include
│ └── linux
│ │ ├──leds.h *
【*表示核心文件】
上面即为LED子系统的目录结构,其主要核心文件有:
- led-core.c:核心层实现,抽象软件实现的相关功能,如闪烁,亮度设置等等,并管理LED设备
- led-gpio.c:直接控制硬件设备,并且将其硬件设备注册进入LED驱动框架
- led-class.c:定义用户访问的相关接口
- led-class-flash.c:灯闪烁相关功能函数实现
- led-triggers.c:LED出发功能的抽象
- ledtrig-cpu.c:将LED作为CPU灯
- ledtrig-heartbeat.c:将LED作为心跳灯
打开了LED子系统目录下的kernel/drivers/leds/Makefile,我们看到
# SPDX-License-Identifier: GPL-2.0
# LED Core
obj-$(CONFIG_NEW_LEDS)+= led-core.o
obj-$(CONFIG_LEDS_CLASS)+= led-class.o
obj-$(CONFIG_LEDS_CLASS_FLASH)+= led-class-flash.o
obj-$(CONFIG_LEDS_TRIGGERS)+= led-triggers.o
我们必须在内核的配置中,通过 make menuconfig打开LED的相关配置,才支持LED相关功能。
三、查看sysfs文件结构
1. sys/class/leds/
我们在开发板中输入ls /sys/class/leds/,可以查看LED子系统生成的文件信息。
rk3568_r:/ # ls /sys/class/leds
blue gpio-flash green mmc0:: red
- blue:板子的RGB灯的蓝色
- green:板子的RGB灯的绿色
- red: 板子的RGB灯的红色
- gpio-flash:camera gpio闪光灯
- mmc0:: :SD卡指示灯
2. red等子目录
根据打开配置的不同,生成不同的文件节点,比如red目录下信息:
rk3568_r:/sys/class/leds # ls red
brightness max_brightness red_bri_reg subsystem uevent
device power red_delay trigger
相关属性文件有:brightness、max_brightness、trigger等
- max_brightness:表示LED灯的最大亮度值。
- brightness:表示当前LED灯的亮度值,它的可取 值范围为[0~max_brightness],一些LED设备不支持多级亮度,直接以非0值来 表示LED为点亮状态,0值表示灭状态。
@kernel/include/linux/leds.h
enum led_brightness {
LED_OFF = 0, //全暗
LED_HALF = 127, //一半亮度
LED_FULL = 255, //最大亮度
};
- delay_off、delay_on:trigger为timer时,LED亮灭的时间,单位ms
- trigger:则指示了LED灯的触发方式,查看该文件的内容时,该文件会 列出它的所有可用触方式,而当前使用的触发方式会以“[]”符号括起。
常见的触 发方式如下表所示:
| 触发方式 | 说明 |
|---|---|
| none | 无触发方式 |
| disk-activity | 硬盘活动 |
| nand-disk | nand flash活动 |
| mtd | mtd设备活动 |
| timer | 定时器 |
| heartbeat | 系统心跳 |
1)点亮 LED
echo 255 > /sys/class/leds/red/brightness
cat /sys/class/leds/red/brightness
cat /sys/class/leds/red/max_brightness
2)关闭led
echo 0 > /sys/class/leds/red/delay_on
或
echo 0 > /sys/class/leds/red/brightness
3)这几个文件节点由下面宏表示,
@drivers/leds/led-class.c
static DEVICE_ATTR_RO(max_brightness);
#ifdef CONFIG_LEDS_TRIGGERS
static DEVICE_ATTR(trigger, 0644, led_trigger_show, led_trigger_store);
static struct attribute *led_trigger_attrs[] = {
&dev_attr_trigger.attr,
NULL,
};
static const struct attribute_group led_trigger_group = {
.attrs = led_trigger_attrs,
};
#endif
static struct attribute *led_class_attrs[] = {
&dev_attr_brightness.attr,
&dev_attr_max_brightness.attr,
NULL,
};
static const struct attribute_group led_group = {
.attrs = led_class_attrs,
};
static const struct attribute_group *led_groups[] = {
&led_group,
#ifdef CONFIG_LEDS_TRIGGERS
&led_trigger_group,
#endif
NULL,
};
创建位置:
int of_led_classdev_register(struct device *parent, struct device_node *np,
struct led_classdev *led_cdev)
{
……
led_cdev->dev = device_create_with_groups(leds_class, parent, 0,
led_cdev, led_cdev->groups, "%s", name);
……
}
3. gpio-flash闪光灯目录
rk3568_r:/sys/class/leds/gpio-flash # ls
brightness flash_strobe max_brightness power trigger
device flash_timeout max_flash_timeout subsystem uevent
创建代码:
@drivers/leds/led-class-flash.c
static struct attribute *led_flash_strobe_attrs[] = {
&dev_attr_flash_strobe.attr,
NULL,
};
static struct attribute *led_flash_timeout_attrs[] = {
&dev_attr_flash_timeout.attr,
&dev_attr_max_flash_timeout.attr,
NULL,
};
static struct attribute *led_flash_brightness_attrs[] = {
&dev_attr_flash_brightness.attr,
&dev_attr_max_flash_brightness.attr,
NULL,
};
static struct attribute *led_flash_fault_attrs[] = {
&dev_attr_flash_fault.attr,
NULL,
};
static const struct attribute_group led_flash_strobe_group = {
.attrs = led_flash_strobe_attrs,
};
static const struct attribute_group led_flash_timeout_group = {
.attrs = led_flash_timeout_attrs,
};
static const struct attribute_group led_flash_brightness_group = {
.attrs = led_flash_brightness_attrs,
};
static const struct attribute_group led_flash_fault_group = {
.attrs = led_flash_fault_attrs,
};
注册代码
int led_classdev_flash_register(struct device *parent,
struct led_classdev_flash *fled_cdev)
{
……
if (led_cdev->flags & LED_DEV_CAP_FLASH) {
……
/* Select the sysfs attributes to be created for the device */
led_flash_init_sysfs_groups(fled_cdev);
}
/* Register led class device */
ret = led_classdev_register(parent, led_cdev);
……
}
测试gpio闪光灯
echo 1 > /sys/class/leds/gpio-flash/flash_strobe
注意,实际操作摄像头闪光灯,并不是通过sysfs下的文件节点操作,而是通过v4l2架构下发ioctl的命令来实现的
四、驱动解析
1. 结构体和注册函数
下面介绍led相关的重要的结构体
struct led_classdev {
const char *name;
enum led_brightness brightness; //光强
enum led_brightness max_brightness; //最大光强
int flags;
…………
/* set_brightness_work / blink_timer flags, atomic, private. */
unsigned long work_flags;
…………
/* Set LED brightness level
* Must not sleep. Use brightness_set_blocking for drivers
* that can sleep while setting brightness.
*/
void (*brightness_set)(struct led_classdev *led_cdev,
enum led_brightness brightness); //设置光强
/*
* Set LED brightness level immediately - it can block the caller for
* the time required for accessing a LED device register.
*/
int (*brightness_set_blocking)(struct led_classdev *led_cdev,
enum led_brightness brightness);
/* Get LED brightness level */
enum led_brightness (*brightness_get)(struct led_classdev *led_cdev); //获取光强
/*
* Activate hardware accelerated blink, delays are in milliseconds
* and if both are zero then a sensible default should be chosen.
* The call should adjust the timings in that case and if it can't
* match the values specified exactly.
* Deactivate blinking again when the brightness is set to LED_OFF
* via the brightness_set() callback.
*/
int (*blink_set)(struct led_classdev *led_cdev,
unsigned long *delay_on,
unsigned long *delay_off);
struct device *dev;
const struct attribute_group **groups;
struct list_head node; /* LED Device list */
const char *default_trigger; /* Trigger to use */
unsigned long blink_delay_on, blink_delay_off;
struct timer_list blink_timer;
int blink_brightness;
int new_blink_brightness;
void (*flash_resume)(struct led_classdev *led_cdev);
struct work_struct set_brightness_work;
int delayed_set_value;
#ifdef CONFIG_LEDS_TRIGGERS
/* Protects the trigger data below */
struct rw_semaphore trigger_lock;
struct led_trigger *trigger;
struct list_head trig_list;
void *trigger_data;
/* true if activated - deactivate routine uses it to do cleanup */
bool activated;
#endif
#ifdef CONFIG_LEDS_BRIGHTNESS_HW_CHANGED
int brightness_hw_changed;
struct kernfs_node *brightness_hw_changed_kn;
#endif
/* Ensures consistent access to the LED Flash Class device */
struct mutex led_access;
};
该结构体包括led操作的所有信息,和回调函数
注册struct led_classdev结构图变量:
#define led_classdev_register(parent, led_cdev) \
of_led_classdev_register(parent, NULL, led_cdev)
对于gpio闪光灯,则需要填充一下结构体:
struct led_classdev_flash {
/* led class device */
struct led_classdev led_cdev;
/* flash led specific ops */
const struct led_flash_ops *ops;
/* flash brightness value in microamperes along with its constraints */
struct led_flash_setting brightness;
/* flash timeout value in microseconds along with its constraints */
struct led_flash_setting timeout;
/* LED Flash class sysfs groups */
const struct attribute_group *sysfs_groups[LED_FLASH_SYSFS_GROUPS_SIZE];
};
gpio闪光灯注册函数:
int led_classdev_flash_register(struct device *parent,
struct led_classdev_flash *fled_cdev)
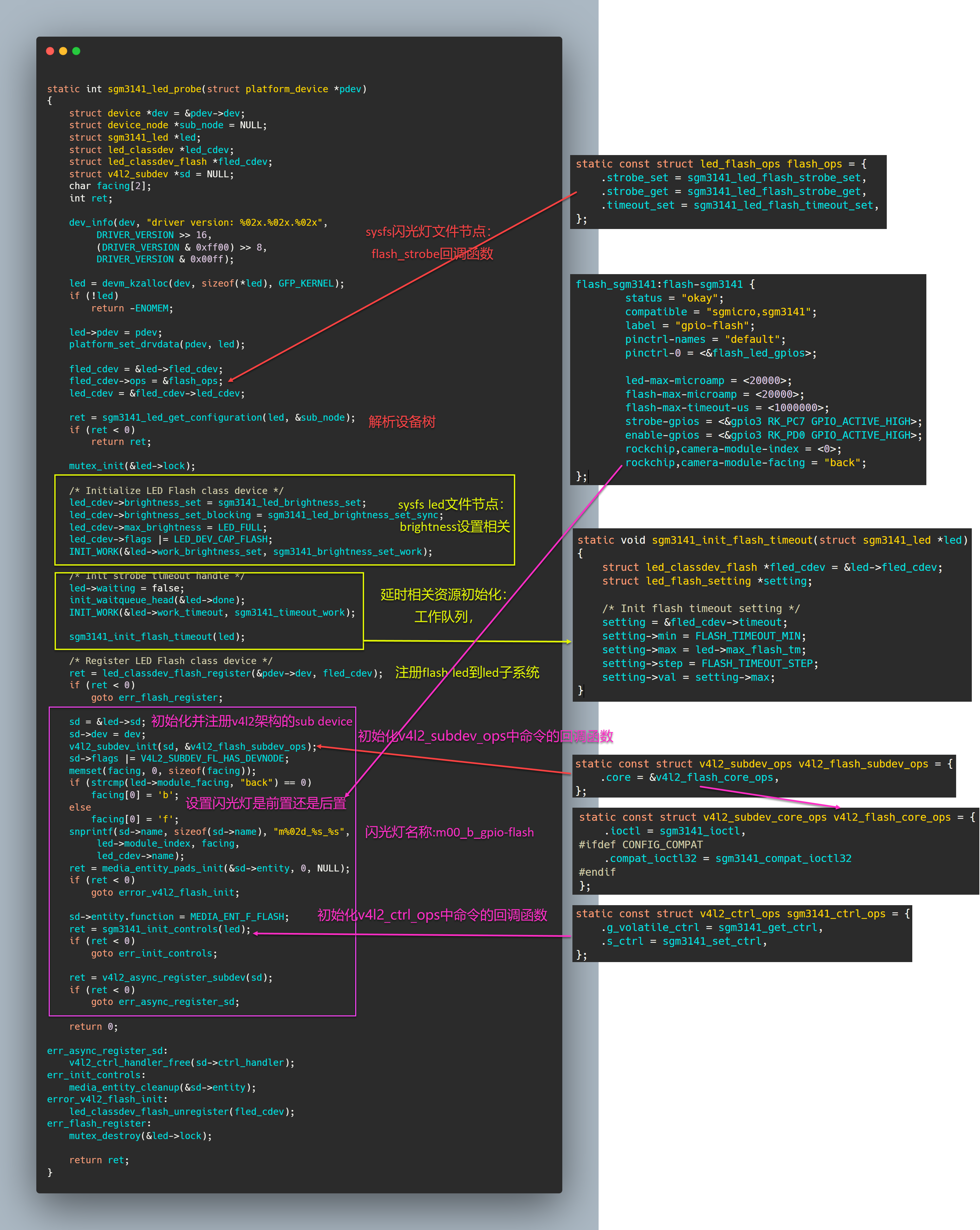
2. gpio闪光灯sgm3141驱动详解
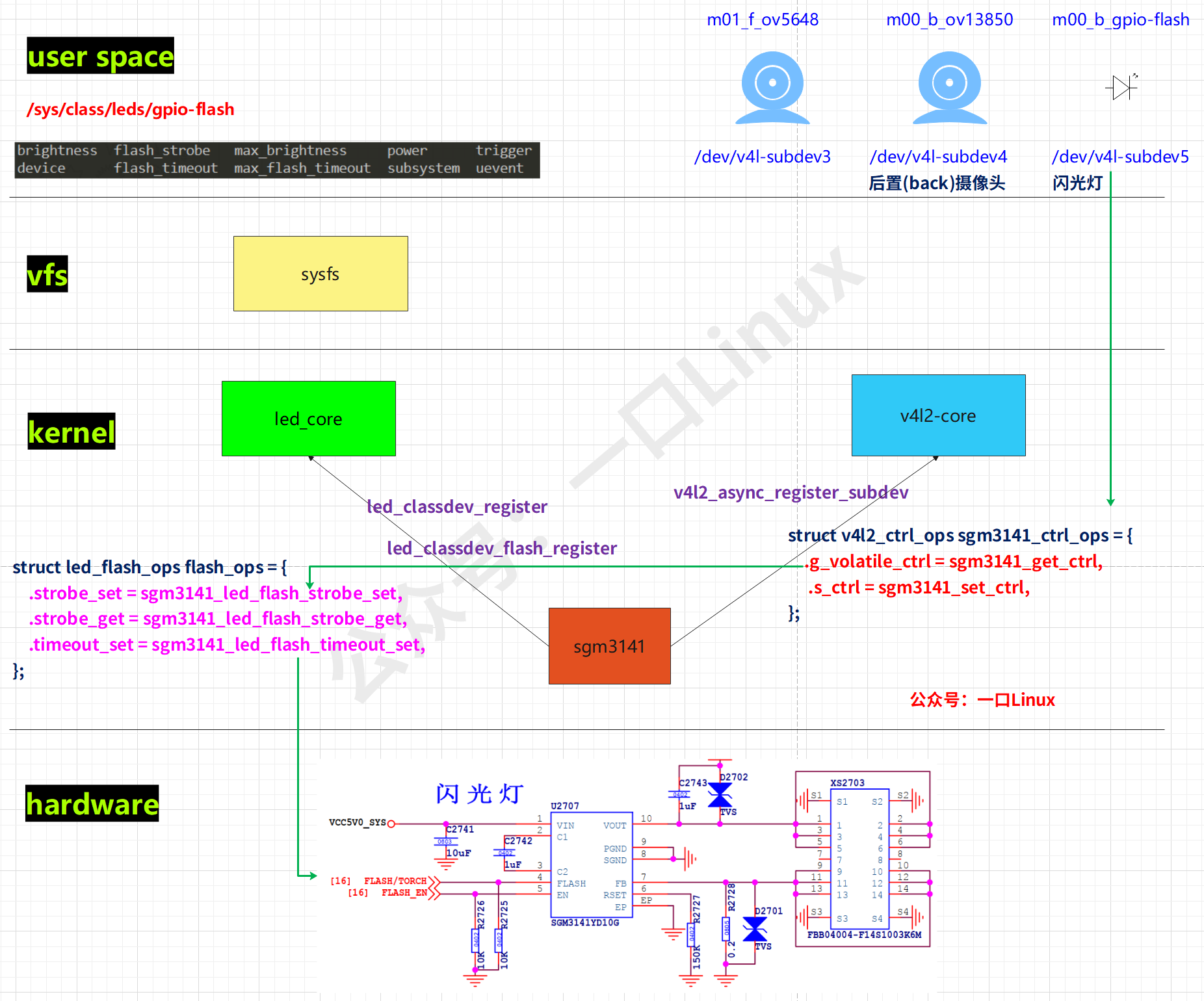
看上图:
- sgm3141驱动通过函数led_classdev_flash_register()->led_classdev_register()向led子系统注册该设备
- sgm3141驱动通过函数v4l2_async_register_subdev()向v4l2子系统注册该设备
- 如果用户直接通过/sys/class/leds/gpio-flash/flash_strobe文件操作led灯,则会直接调用struct led_flash_ops flash_ops的 .strobe_set方法,即sgm3141_led_flash_strobe_set()
操作log:
[ 492.026391] sgm3141_led_flash_strobe_set+0x24/0x78
[ 492.026453] flash_strobe_store+0x88/0xd8
[ 492.026517] dev_attr_store+0x18/0x28
[ 492.026571] sysfs_kf_write+0x48/0x58
[ 492.026620] kernfs_fop_write+0xf4/0x220
[ 492.026683] __vfs_write+0x34/0x158
[ 492.026733] vfs_write+0xb0/0x1d0
[ 492.026784] ksys_write+0x64/0xe0
[ 492.026833] __arm64_sys_write+0x14/0x20
[ 492.026867] el0_svc_common.constprop.0+0x64/0x178
[ 492.026912] el0_svc_handler+0x28/0x78
[ 492.026966] el0_svc+0x8/0xc
- 如果用户的app拍照时操作闪光灯,则是通过v4l2子系统调用下发ioctl命令
命令序列:
V4L2_CID_FLASH_LED_MODE :设置led mod为 V4L2_FLASH_LED_MODE_TORCH(2),并点灯
V4L2_CID_FLASH_LED_MODE:到达指定超时时间(2.7秒),设置led mod为 V4L2_FLASH_LED_MODE_NONE 0
V4L2_CID_FLASH_LED_MODE:在此设置led mod为V4L2_FLASH_LED_MODE_FLASH(1)
V4L2_CID_FLASH_STROBE_STOP:停止闪光
操作log:
[ 90.246203] sgm3141 V4L2_CID_FLASH_LED_MODE 2
[ 90.246251] sgm3141_set_ctrl(),376
[ 90.246262] sgm3141_set_output(),78 0
[ 90.246277] sgm3141_set_output(),78 1
[ 92.902746] sgm3141 V4L2_CID_FLASH_LED_MODE 0
[ 92.902775] sgm3141_set_ctrl(),376
[ 92.902781] sgm3141_set_output(),78 0
[ 93.034903] sgm3141 V4L2_CID_FLASH_LED_MODE 1
[ 93.034929] sgm3141_set_ctrl(),376
[ 93.034934] sgm3141_set_output(),78 0
[ 93.034943] sgm3141_led_flash_strobe_set(),166 state=1
[ 93.034959] sgm3141_set_output(),78 1
[ 93.034977] sgm3141 V4L2_CID_FLASH_STROBE_STOP 1
[ 93.034988] sgm3141_set_ctrl(),406
[ 93.034993] sgm3141_led_flash_strobe_set(),166 state=0
[ 93.035002] sgm3141_set_output(),78 0
[ 93.035058] sgm3141_timeout_work(),117
- sgm驱动注册流程分析
驱动架构基于platform总线,platform_driver 结构体如下:
static const struct of_device_id sgm3141_led_dt_match[] = {
{ .compatible = "sgmicro,sgm3141" },
{},
};
MODULE_DEVICE_TABLE(of, sgm3141_led_dt_match);
static struct platform_driver sgm3141_led_driver = {
.probe = sgm3141_led_probe,
.remove = sgm3141_led_remove,
.driver = {
.name = "sgm3141-flash",
.of_match_table = sgm3141_led_dt_match,
},
};
Camera | 10.linux驱动 led架构-基于rk3568的更多相关文章
- Camera | 5.Linux v4l2架构(基于rk3568)
上一篇我们讲解了如何编写基于V4L2的应用程序编写,本文主要讲解内核中V4L2架构,以及一些最重要的结构体.注册函数. 厂家在实现自己的摄像头控制器驱动时,总体上都遵循这个架构来实现,但是不同厂家.不 ...
- Linux 驱动——Led驱动2
led_drv.c驱动文件: #include <linux/module.h>#include <linux/kernel.h>#include <linux/init ...
- Java开发架构篇:领域驱动设计架构基于SpringCloud搭建微服务
作者:小傅哥 博客:https://bugstack.cn 沉淀.分享.成长,让自己和他人都能有所收获! 一.前言介绍 微服务不是泥球小单体,而是具备更加清晰职责边界的完整一体的业务功能服务.领域驱动 ...
- Linux 驱动——LED(驱动分离分层)
led_dev.c文件: #include <linux/module.h>#include <linux/version.h> #include <linux/init ...
- Linux 驱动——Led驱动1
led_drv.c驱动文件: #include <linux/module.h>#include <linux/kernel.h>#include <linux/init ...
- arm Linux 驱动LED子系统 测试
Linux内核在3.0以上引入了设备树概念(具体哪个版本不清楚)在编译内核后需要将与之对应的dtb文件也下载人板子上才能使内核与硬件关联起来. dtb文件是有dts文件编译后生成的:例如 /* * C ...
- Linux系统启动那些事—基于Linux 3.10内核【转】
转自:https://blog.csdn.net/shichaog/article/details/40218763 Linux系统启动那些事—基于Linux 3.10内核 csdn 我的空间的下载地 ...
- 驱动编程思想之初体验 --------------- 嵌入式linux驱动开发之点亮LED
这节我们就开始开始进行实战啦!这里顺便说一下啊,出来做开发的基础很重要啊,基础不好,迟早是要恶补的.个人深刻觉得像这种嵌入式的开发对C语言和微机接口与原理是非常依赖的,必须要有深厚的基础才能hold的 ...
- (笔记)linux设备驱动--LED驱动
linux设备驱动--LED驱动 最近正在学习设备驱动开发,因此打算写一个系列博客,即是对自己学习的一个总结,也是对自己的一个督促,有不对,不足,需要改正的地方还望大家指出,而且希望结识志同道合的朋友 ...
- 超简单易用的 “在 pcduino 开发板上写 Linux 驱动控制板载 LED 的闪烁”
版权声明:本文为博主原创文章,未经博主同意不得转载.转载联系 QQ 30952589,加好友请注明来意. https://blog.csdn.net/sleks/article/details/251 ...
随机推荐
- 什么是spring,它能够做什么?
1.什么是SpringSpring是一个开源框架,它由Rod Johnson创建.它是为了解决企业应用开发的复杂性而创建的. Spring使用基本的JavaBean来完成以前只可能由EJB完成的事情. ...
- 15-BFC
01 BFC官方解释 https://www.w3.org/TR/CSS2/visuren.html#normal-flow 大致意思如下 02 什么情况下会形成BFC MDN解释 https://d ...
- 如何设置 QEMU 输出到控制台并使用 Shell 脚本自动化
如何设置 QEMU 输出到控制台并使用 Shell 脚本自动化 原文:How to Setup QEMU Output to Console and Automate Using Shell Scri ...
- Linux C 读写超过2G的大文件 注意事项
背景 在项目中做大文件的增量读写,遇到了问题: fopen : Value too large for defined data type. 习惯性地根据这个提示查阅的有关资料显示: 1)工具链太老了 ...
- CF1862C 题解
考虑每个木板在水平放置后对每个位置上产生的贡献. 稍微手玩几组样例: 不难发现一个高度为 \(h\) 的木板在水平放置后会是位置 \([1,h]\) 上高度增加 \(1\). 但是高度最大是 \(10 ...
- K210开发板学习笔记-点亮LED灯
1. 介绍 和 51 单片机非常像,实验的2个LED灯都是一头接了 +3.3v 电源,控制 LED灯亮的话需要 K210芯片 对应的管脚提供一个低电平. 管脚: 低电平-LED亮 高电平-LED灭 G ...
- 如何用python计算不定积分
在Python中,计算不定积分(即原函数或反导数)可以通过SymPy库实现.SymPy是一个用于符号数学的Python库,支持许多类型的数学对象,包括整数.有理数.实数.复数.函数.极限.积分.微分. ...
- vulnhub - LAMPSECURITY: CTF5
vulnhub - LAMPSECURITY: CTF5 信息收集 端口扫描 nmap -sT --min-rate 10000 -p- 192.168.157.164 详细扫描 sudo nmap ...
- MySQL执行过程及执行顺序
一.MySQL执行过程 简单概括: 1.我们在客户端发起一个SQL的查询: 2.连接器判断用户登录以及用户权限: 3.缓存命中,走缓存,直接返回查询结果: 3.缓存没命中,到达分析器,对SQL语句进行 ...
- Java 散列表HashTable
什么是散列表hash table和使用场景 什么是散列表 散列表(Hash table,也叫哈希表),是根据关键码值(key value)而直接进行访问的数据结构.它通过把关键码值映射到表中一个位置来 ...