隐马尔科夫模型HMM(二)前向后向算法评估观察序列概率
隐马尔科夫模型HMM(二)前向后向算法评估观察序列概率
隐马尔科夫模型HMM(三)鲍姆-韦尔奇算法求解HMM参数(TODO)
隐马尔科夫模型HMM(四)维特比算法解码隐藏状态序列(TODO)
在隐马尔科夫模型HMM(一)HMM模型中,我们讲到了HMM模型的基础知识和HMM的三个基本问题,本篇我们就关注于HMM第一个基本问题的解决方法,即已知模型和观测序列,求观测序列出现的概率。
1. 回顾HMM问题一:求观测序列的概率
首先我们回顾下HMM模型的问题一。这个问题是这样的。我们已知HMM模型的参数$\lambda = (A, B, \Pi)$。其中$A$是隐藏状态转移概率的矩阵,$B$是观测状态生成概率的矩阵, $\Pi$是隐藏状态的初始概率分布。同时我们也已经得到了观测序列$O =\{o_1,o_2,...o_T\}$,现在我们要求观测序列$O$在模型$\lambda$下出现的条件概率$P(O|\lambda)$。
乍一看,这个问题很简单。因为我们知道所有的隐藏状态之间的转移概率和所有从隐藏状态到观测状态生成概率,那么我们是可以暴力求解的。
我们可以列举出所有可能出现的长度为$T$的隐藏序列$I = \{i_1,i_2,...,i_T\}$,分布求出这些隐藏序列与观测序列$O =\{o_1,o_2,...o_T\}$的联合概率分布$P(O,I|\lambda)$,这样我们就可以很容易的求出边缘分布$P(O|\lambda)$了。
具体暴力求解的方法是这样的:首先,任意一个隐藏序列$I = \{i_1,i_2,...,i_T\}$出现的概率是:$$P(I|\lambda) = \pi_{i_1} a_{i_1i_2} a_{i_2i_3}... a_{i_{T-1}\;\;i_T}$$
对于固定的状态序列$I = \{i_1,i_2,...,i_T\}$,我们要求的观察序列$O =\{o_1,o_2,...o_T\}$出现的概率是:$$P(O|I, \lambda) = b_{i_1}(o_1)b_{i_2}(o_2)...b_{i_T}(o_T)$$
则$O$和$I$联合出现的概率是:$$P(O,I|\lambda) = P(I|\lambda)P(O|I, \lambda) = \pi_{i_1}b_{i_1}(o_1)a_{i_1i_2}b_{i_2}(o_2)...a_{i_{T-1}\;\;i_T}b_{i_T}(o_T)$$
然后求边缘概率分布,即可得到观测序列$O$在模型$\lambda$下出现的条件概率$P(O|\lambda)$:$$P(O|\lambda) = \sum\limits_{I}P(O,I|\lambda) = \sum\limits_{i_1,i_2,...i_T}\pi_{i_1}b_{i_1}(o_1)a_{i_1i_2}b_{i_2}(o_2)...a_{i_{T-1}\;\;i_T}b_{i_T}(o_T)$$
虽然上述方法有效,但是如果我们的隐藏状态数$N$非常多的那就麻烦了,此时我们预测状态有$N^T$种组合,算法的时间复杂度是$O(TN^T)$阶的。因此对于一些隐藏状态数极少的模型,我们可以用暴力求解法来得到观测序列出现的概率,但是如果隐藏状态多,则上述算法太耗时,我们需要寻找其他简洁的算法。
前向后向算法就是来帮助我们在较低的时间复杂度情况下求解这个问题的。
2. 用前向算法求HMM观测序列的概率
前向后向算法是前向算法和后向算法的统称,这两个算法都可以用来求HMM观测序列的概率。我们先来看看前向算法是如何求解这个问题的。
前向算法本质上属于动态规划的算法,也就是我们要通过找到局部状态递推的公式,这样一步步的从子问题的最优解拓展到整个问题的最优解。
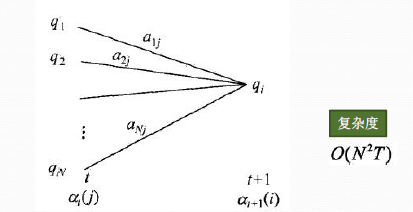
在前向算法中,通过定义“前向概率”来定义动态规划的这个局部状态。什么是前向概率呢, 其实定义很简单:定义时刻$t$时隐藏状态为$q_i$, 观测状态的序列为$o_1,o_2,...o_t$的概率为前向概率。记为:$$\alpha_t(i) = P(o_1,o_2,...o_t, i_t =q_i | \lambda)$$
既然是动态规划,我们就要递推了,现在我们假设我们已经找到了在时刻$t$时各个隐藏状态的前向概率,现在我们需要递推出时刻$t+1$时各个隐藏状态的前向概率。
从下图可以看出,我们可以基于时刻$t$时各个隐藏状态的前向概率,再乘以对应的状态转移概率,即$\alpha_t(j)a_{ji}$就是在时刻$t$观测到$o_1,o_2,...o_t$,并且时刻$t$隐藏状态$q_j$, 时刻$t+1$隐藏状态$q_i$的概率。如果将想下面所有的线对应的概率求和,即$\sum\limits_{j=1}^N\alpha_t(j)a_{ji}$就是在时刻$t$观测到$o_1,o_2,...o_t$,并且时刻$t+1$隐藏状态$q_i$的概率。继续一步,由于观测状态$o_{t+1}$只依赖于$t+1$时刻隐藏状态$q_i$, 这样$[\sum\limits_{j=1}^N\alpha_t(j)a_{ji}]b_i(o_{t+1})$就是在在时刻$t+1$观测到$o_1,o_2,...o_t,o_{t+1}$,并且时刻$t+1$隐藏状态$q_i$的概率。而这个概率,恰恰就是时刻$t+1$对应的隐藏状态$i$的前向概率,这样我们得到了前向概率的递推关系式如下:$$\alpha_{t+1}(i) = \Big[\sum\limits_{j=1}^N\alpha_t(j)a_{ji}\Big]b_i(o_{t+1})$$
我们的动态规划从时刻1开始,到时刻$T$结束,由于$\alpha_T(i)$表示在时刻$T$观测序列为$o_1,o_2,...o_T$,并且时刻$T$隐藏状态$q_i$的概率,我们只要将所有隐藏状态对应的概率相加,即$\sum\limits_{i=1}^N\alpha_T(i)$就得到了在时刻$T$观测序列为$o_1,o_2,...o_T$的概率。
下面总结下前向算法。
输入:HMM模型$\lambda = (A, B, \Pi)$,观测序列$O=(o_1,o_2,...o_T)$
输出:观测序列概率$P(O|\lambda)$
1) 计算时刻1的各个隐藏状态前向概率:$$\alpha_1(i) = \pi_ib_i(o_1),\; i=1,2,...N$$
2) 递推时刻$2,3,...T$时刻的前向概率:$$\alpha_{t+1}(i) = \Big[\sum\limits_{j=1}^N\alpha_t(j)a_{ji}\Big]b_i(o_{t+1}),\; i=1,2,...N$$
3) 计算最终结果:$$P(O|\lambda) = \sum\limits_{i=1}^N\alpha_T(i)$$
从递推公式可以看出,我们的算法时间复杂度是$O(TN^2)$,比暴力解法的时间复杂度$O(TN^T)$少了几个数量级。
3. HMM前向算法求解实例
这里我们用隐马尔科夫模型HMM(一)HMM模型中盒子与球的例子来显示前向概率的计算。
我们的观察集合是:$$V=\{红,白\},M=2$$
我们的状态集合是:$$Q =\{盒子1,盒子2,盒子3\}, N=3 $$
而观察序列和状态序列的长度为3.
初始状态分布为:$$\Pi = (0.2,0.4,0.4)^T$$
状态转移概率分布矩阵为:
$$A = \left( \begin{array} {ccc} 0.5 & 0.2 & 0.3 \\ 0.3 & 0.5 & 0.2 \\ 0.2 & 0.3 &0.5 \end{array} \right) $$
观测状态概率矩阵为:
$$B = \left( \begin{array} {ccc} 0.5 & 0.5 \\ 0.4 & 0.6 \\ 0.7 & 0.3 \end{array} \right) $$
球的颜色的观测序列:$$O=\{红,白,红\}$$
按照我们上一节的前向算法。首先计算时刻1三个状态的前向概率:
时刻1是红色球,隐藏状态是盒子1的概率为:$$\alpha_1(1) = \pi_1b_1(o_1) = 0.2 \times 0.5 = 0.1$$
隐藏状态是盒子2的概率为:$$\alpha_1(2) = \pi_2b_2(o_1) = 0.4 \times 0.4 = 0.16$$
隐藏状态是盒子3的概率为:$$\alpha_1(3) = \pi_3b_3(o_1) = 0.4 \times 0.7 = 0.28$$
现在我们可以开始递推了,首先递推时刻2三个状态的前向概率:
时刻2是白色球,隐藏状态是盒子1的概率为:$$\alpha_2(1) = \Big[\sum\limits_{i=1}^3\alpha_1(i)a_{i1}\Big]b_1(o_2) = [0.1*0.5+0.16*0.3+0.28*0.2 ] \times 0.5 = 0.077$$
隐藏状态是盒子2的概率为:$$\alpha_2(2) = \Big[\sum\limits_{i=1}^3\alpha_1(i)a_{i2}\Big]b_2(o_2) = [0.1*0.2+0.16*0.5+0.28*0.3 ] \times 0.6 = 0.1104$$
隐藏状态是盒子3的概率为:$$\alpha_2(3) = \Big[\sum\limits_{i=1}^3\alpha_1(i)a_{i3}\Big]b_3(o_2) = [0.1*0.3+0.16*0.2+0.28*0.5 ] \times 0.3 = 0.0606$$
继续递推,现在我们递推时刻3三个状态的前向概率:
时刻3是红色球,隐藏状态是盒子1的概率为:$$\alpha_3(1) = \Big[\sum\limits_{i=1}^3\alpha_2(i)a_{i1}\Big]b_1(o_3) = [0.077*0.5+0.1104*0.3+0.0606*0.2 ] \times 0.5 = 0.04187$$
隐藏状态是盒子2的概率为:$$\alpha_3(2) = \Big[\sum\limits_{i=1}^3\alpha_2(i)a_{i2}\Big]b_2(o_3) = [0.077*0.2+0.1104*0.5+0.0606*0.3 ] \times 0.4 = 0.03551$$
隐藏状态是盒子3的概率为:$$\alpha_3(3) = \Big[\sum\limits_{i=1}^3\alpha_3(i)a_{i3}\Big]b_3(o_3) = [0.077*0.3+0.1104*0.2+0.0606*0.5 ] \times 0.7 = 0.05284$$
最终我们求出观测序列:$O=\{红,白,红\}$的概率为:$$P(O|\lambda) = \sum\limits_{i=1}^3\alpha_3(i) = 0.13022 $$
4. 用后向算法求HMM观测序列的概率
熟悉了用前向算法求HMM观测序列的概率,现在我们再来看看怎么用后向算法求HMM观测序列的概率。
后向算法和前向算法非常类似,都是用的动态规划,唯一的区别是选择的局部状态不同,后向算法用的是“后向概率”,那么后向概率是如何定义的呢?
定义时刻$t$时隐藏状态为$q_i$, 从时刻$t+1$到最后时刻$T$的观测状态的序列为$o_{t+1},o_{t+2},...o_T$的概率为后向概率。记为:$$\beta_t(i) = P(o_{t+1},o_{t+2},...o_T, i_t =q_i | \lambda)$$
后向概率的动态规划递推公式和前向概率是相反的。现在我们假设我们已经找到了在时刻$t+1$时各个隐藏状态的后向概率$\beta_{t+1}(j)$,现在我们需要递推出时刻$t$时各个隐藏状态的后向概率。如下图,我们可以计算出观测状态的序列为$o_{t+2},o_{t+3},...o_T$, $t$时隐藏状态为$q_i$, 时刻$t+1$隐藏状态为$q_j$的概率为$a_{ij}\beta_{t+1}(j)$, 接着可以得到观测状态的序列为$o_{t+1},o_{t+2},...o_T$, $t$时隐藏状态为$q_i$, 时刻$t+1$隐藏状态为$q_j$的概率为$a_{ij}b_j(o_{t+1})\beta_{t+1}(j)$, 则把下面所有线对应的概率加起来,我们可以得到观测状态的序列为$o_{t+1},o_{t+2},...o_T$, $t$时隐藏状态为$q_i$的概率为$\sum\limits_{j=1}^{N}a_{ij}b_j(o_{t+1})\beta_{t+1}(j)$,这个概率即为时刻$t$的后向概率。
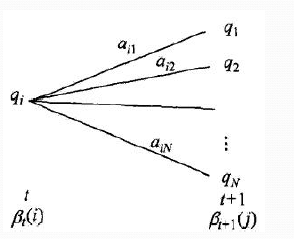
这样我们得到了后向概率的递推关系式如下:$$\beta_{t}(i) = \sum\limits_{j=1}^{N}a_{ij}b_j(o_{t+1})\beta_{t+1}(j)$$
现在我们总结下后向算法的流程,注意下和前向算法的相同点和不同点:
输入:HMM模型$\lambda = (A, B, \Pi)$,观测序列$O=(o_1,o_2,...o_T)$
输出:观测序列概率$P(O|\lambda)$
1) 初始化时刻$T$的各个隐藏状态后向概率:$$\beta_T(i) = 1,\; i=1,2,...N$$
2) 递推时刻$T-1,T-2,...1$时刻的后向概率:$$\beta_{t}(i) = \sum\limits_{j=1}^{N}a_{ij}b_j(o_{t+1})\beta_{t+1}(j),\; i=1,2,...N$$
3) 计算最终结果:$$P(O|\lambda) = \sum\limits_{i=1}^N\pi_ib_i(o_1)\beta_1(i)$$
此时我们的算法时间复杂度仍然是$O(TN^2)$。
5. HMM常用概率的计算
利用前向概率和后向概率,我们可以计算出HMM中单个状态和两个状态的概率公式。
1)给定模型$\lambda$和观测序列$O$,在时刻$t$处于状态$q_i$的概率记为:$$\gamma_t(i) = P(i_t = q_i | O,\lambda) = \frac{P(i_t = q_i ,O|\lambda)}{P(O|\lambda)} $$
利用前向概率和后向概率的定义可知:$$P(i_t = q_i ,O|\lambda) = \alpha_t(i)\beta_t(i)$$
于是我们得到:$$\gamma_t(i) = \frac{ \alpha_t(i)\beta_t(i)}{\sum\limits_{j=1}^N \alpha_t(j)\beta_t(j)}$$
2)给定模型$\lambda$和观测序列$O$,在时刻$t$处于状态$q_i$,且时刻$t+1$处于状态$q_j$的概率记为:$$\xi_t(i,j) = P(i_t = q_i, i_{t+1}=q_j | O,\lambda) = \frac{ P(i_t = q_i, i_{t+1}=q_j , O|\lambda)}{P(O|\lambda)} $$
而$P(i_t = q_i, i_{t+1}=q_j , O|\lambda)$可以由前向后向概率来表示为:$$P(i_t = q_i, i_{t+1}=q_j , O|\lambda) = \alpha_t(i)a_{ij}b_j(o_{t+1})\beta_{t+1}(j)$$
从而最终我们得到$\xi_t(i,j)$的表达式如下:$$\xi_t(i,j) = \frac{\alpha_t(i)a_{ij}b_j(o_{t+1})\beta_{t+1}(j)}{\sum\limits_{r=1}^N\sum\limits_{s=1}^N\alpha_t(r)a_{rs}b_s(o_{t+1})\beta_{t+1}(s)}$$
3) 将$\gamma_t(i)$和$\xi_t(i,j)$在各个时刻$t$求和,可以得到:
在观测序列$O$下状态$i$出现的期望值$\sum\limits_{t=1}^T\gamma_t(i)$
在观测序列$O$下由状态$i$转移的期望值$\sum\limits_{t=1}^{T-1}\gamma_t(i)$
在观测序列$O$下由状态$i$转移到状态$j$的期望值$\sum\limits_{t=1}^{T-1}\xi_t(i,j)$
上面这些常用的概率值在求解HMM问题二,即求解HMM模型参数的时候需要用到。我们在这个系列的第三篇来讨论求解HMM参数的问题和解法。
(欢迎转载,转载请注明出处。欢迎沟通交流: pinard.liu@ericsson.com)
隐马尔科夫模型HMM(二)前向后向算法评估观察序列概率的更多相关文章
- 隐马尔科夫模型HMM(四)维特比算法解码隐藏状态序列
隐马尔科夫模型HMM(一)HMM模型 隐马尔科夫模型HMM(二)前向后向算法评估观察序列概率 隐马尔科夫模型HMM(三)鲍姆-韦尔奇算法求解HMM参数 隐马尔科夫模型HMM(四)维特比算法解码隐藏状态 ...
- 隐马尔科夫模型HMM(一)HMM模型
隐马尔科夫模型HMM(一)HMM模型基础 隐马尔科夫模型HMM(二)前向后向算法评估观察序列概率 隐马尔科夫模型HMM(三)鲍姆-韦尔奇算法求解HMM参数(TODO) 隐马尔科夫模型HMM(四)维特比 ...
- 隐马尔科夫模型HMM(三)鲍姆-韦尔奇算法求解HMM参数
隐马尔科夫模型HMM(一)HMM模型 隐马尔科夫模型HMM(二)前向后向算法评估观察序列概率 隐马尔科夫模型HMM(三)鲍姆-韦尔奇算法求解HMM参数(TODO) 隐马尔科夫模型HMM(四)维特比算法 ...
- 隐马尔科夫模型HMM学习最佳范例
谷歌路过这个专门介绍HMM及其相关算法的主页:http://rrurl.cn/vAgKhh 里面图文并茂动感十足,写得通俗易懂,可以说是介绍HMM很好的范例了.一个名为52nlp的博主(google ...
- 猪猪的机器学习笔记(十七)隐马尔科夫模型HMM
隐马尔科夫模型HMM 作者:樱花猪 摘要: 本文为七月算法(julyedu.com)12月机器学习第十七次课在线笔记.隐马尔可夫模型(Hidden Markov Model,HMM)是统计模型,它用来 ...
- 用hmmlearn学习隐马尔科夫模型HMM
在之前的HMM系列中,我们对隐马尔科夫模型HMM的原理以及三个问题的求解方法做了总结.本文我们就从实践的角度用Python的hmmlearn库来学习HMM的使用.关于hmmlearn的更多资料在官方文 ...
- 机器学习之隐马尔科夫模型HMM(六)
摘要 隐马尔可夫模型(Hidden Markov Model,HMM)是统计模型,它用来描述一个含有隐含未知参数的马尔科夫过程.其难点是从可观察的参数中确定该过程的隐含参数,然后利用这些参数来作进一步 ...
- 隐马尔科夫模型 HMM(Hidden Markov Model)
本科阶段学了三四遍的HMM,机器学习课,自然语言处理课,中文信息处理课:如今学研究生的自然语言处理,又碰见了这个老熟人: 虽多次碰到,但总觉得一知半解,对其了解不够全面,借着这次的机会,我想要直接搞定 ...
- 隐马尔科夫模型HMM
崔晓源 翻译 我们通常都习惯寻找一个事物在一段时间里的变化规律.在很多领域我们都希望找到这个规律,比如计算机中的指令顺序,句子中的词顺序和语音中的词顺序等等.一个最适用的例子就是天气的预测. 首先,本 ...
随机推荐
- mysql数据库实操笔记20170419
一.insert与replace区别: insert:当表里有字段设置了主键或者唯一时,插入重复的唯一或主键字段值是不能执行的: replase:当表里有字段设置了主键或者唯一时,插入重复的唯一或主键 ...
- JS - A*寻路
算法核心 A*估值算法 寻路估值算法有非常多:常用的有广度优先算法,深度优先算法,哈夫曼树等等,游戏中用的比较多的如:A*估值 算法描述 对起点与终点进行横纵坐标的运算 代码实现 start: 起点坐 ...
- vscode同步设置&扩展插件
首先安装同步插件: Settings Sync 第二部进入你的github如图: 打开设置选项: 新建一个token: 如图: 记住这个token值 转到vscode 按shift+alt +u ...
- JS组件系列——自己动手封装bootstrap-treegrid组件
前言:最近产品需要设计一套相对完整的组织架构的解决方案,由于组织架构涉及到层级关系,在表格里面展示层级关系,自然就要用到所谓的treegrid.可惜的是,一些轻量级的表格组件本身并没有自带树形表格的功 ...
- java 内存管理 —— 《Hotspot内存管理白皮书》
说明 要学习Java或者任意一门技术,我觉得最好的是从官网的资料开始学习.官网所给出的资料总是最权威最知道来龙去脉的.而Java中间,垃圾回收与内存管理是Java中非常重要的一部分.<Hot ...
- 使用虚拟机CentOS7部署CEPH集群
第1章 CEPH部署 1.1 简单介绍 Ceph的部署模式下主要包含以下几个类型的节点 Ø CephOSDs: A Ceph OSD 进程主要用来存储数据,处理数据的replication,恢复 ...
- Understanding a Kernel Oops!
Understanding a kernel panic and doing the forensics to trace the bug is considered a hacker's job. ...
- 关于 vue.js 运行环境的搭建(mac)
由于本人使用的是mac系统,因此在vue.js 的环境搭建上遇到许许多多的坑.感谢 showonne.yubang 技术指导,最终成功解决.下面是个人的搭建过程,权当是做个笔记吧. 由于mac非常人性 ...
- 【Python灰帽子--黑客与逆向工程师的Python编程之道】我的学习笔记,过程.(持续更新HOT)
我的学习笔记---python灰帽子 世界让我遍体鳞伤,但伤口长出的却是翅膀. -------------------------------------------- 前言 本书是由知名安全机构Im ...
- 1.centOS安装Mysql
上个星期研究了一个星期的Mysql,从今天起把学到的东西整理一下. ---------------------------------------------- mysql安装本人亲试过两种安装方式, ...