OpenCV畸变校正源代码分析
图像算法中会经常用到摄像机的畸变校正,有必要总结分析OpenCV中畸变校正方法,其中包括普通针孔相机模型和鱼眼相机模型fisheye两种畸变校正方法。
普通相机模型畸变校正函数针对OpenCV中的cv::initUndistortRectifyMap(),鱼眼相机模型畸变校正函数对应OpenCV中的cv::fisheye::initUndistortRectifyMap()。两种方法算出映射Mapx和Mapy后,统一用cv::Remap()函数进行插值得到校正后的图像。
1. FishEye模型的畸变校正。
方便起见,直接贴出OpenCV源码,我在里面加了注释说明。建议参考OpenCV官方文档看畸变模型原理会更清楚:https://docs.opencv.org/3.0-beta/modules/calib3d/doc/camera_calibration_and_3d_reconstruction.html#fisheye-initundistortrectifymap
简要流程就是:
1. 求内参矩阵的逆,由于摄像机坐标系的三维点到二维图像平面,需要乘以旋转矩阵R和内参矩阵K。那么反向投影回去则是二维图像坐标乘以 K*R的逆矩阵。
2. 将目标图像中的每一个像素点坐标(j,i),乘以1中求出的逆矩阵iR,转换到摄像机坐标系(_x,_y,_w),并归一化得到z=1平面下的三维坐标(x,y,1);
3.求出平面模型下像素点对应鱼眼半球模型下的极坐标(r, theta)。
4.利用鱼眼畸变模型求出拥有畸变时像素点对应的theta_d。
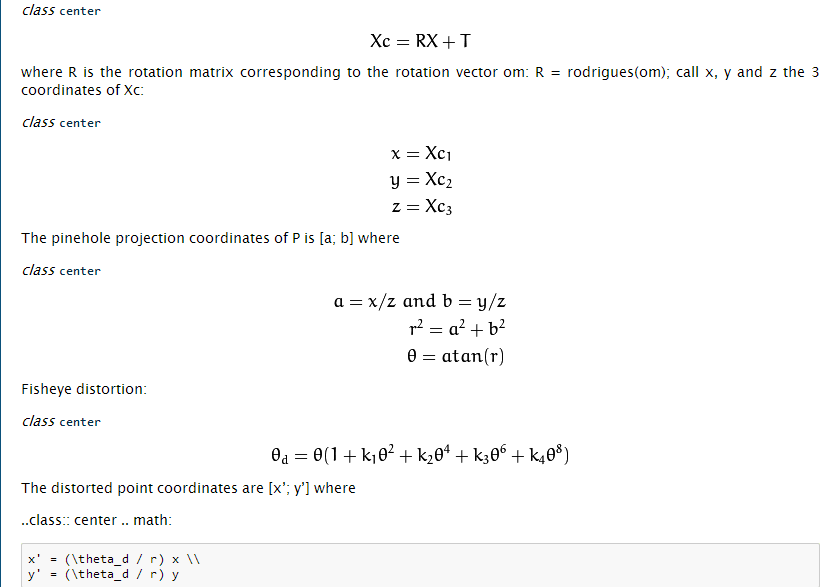
5.利用求出的theta_d值将三维坐标点重投影到二维图像平面得到(u,v),(u,v)即为目标图像对应的畸变图像中像素点坐标
6.使用cv::Remap()函数,根据mapx,mapy取出对应坐标位置的像素值赋值给目标图像,一般采用双线性插值法,得到畸变校正后的目标图像。
#include <opencv2\opencv.hpp> void cv::fisheye::initUndistortRectifyMap( InputArray K, InputArray D, InputArray R, InputArray P,
const cv::Size& size, int m1type, OutputArray map1, OutputArray map2 )
{
CV_Assert( m1type == CV_16SC2 || m1type == CV_32F || m1type <= );
map1.create( size, m1type <= ? CV_16SC2 : m1type );
map2.create( size, map1.type() == CV_16SC2 ? CV_16UC1 : CV_32F ); CV_Assert((K.depth() == CV_32F || K.depth() == CV_64F) && (D.depth() == CV_32F || D.depth() == CV_64F));
CV_Assert((P.empty() || P.depth() == CV_32F || P.depth() == CV_64F) && (R.empty() || R.depth() == CV_32F || R.depth() == CV_64F));
CV_Assert(K.size() == Size(, ) && (D.empty() || D.total() == ));
CV_Assert(R.empty() || R.size() == Size(, ) || R.total() * R.channels() == );
CV_Assert(P.empty() || P.size() == Size(, ) || P.size() == Size(, )); //从内参矩阵K中取出归一化焦距fx,fy; cx,cy
cv::Vec2d f, c;
if (K.depth() == CV_32F)
{
Matx33f camMat = K.getMat();
f = Vec2f(camMat(, ), camMat(, ));
c = Vec2f(camMat(, ), camMat(, ));
}
else
{
Matx33d camMat = K.getMat();
f = Vec2d(camMat(, ), camMat(, ));
c = Vec2d(camMat(, ), camMat(, ));
}
//从畸变系数矩阵D中取出畸变系数k1,k2,k3,k4
Vec4d k = Vec4d::all();
if (!D.empty())
k = D.depth() == CV_32F ? (Vec4d)*D.getMat().ptr<Vec4f>(): *D.getMat().ptr<Vec4d>(); //旋转矩阵RR转换数据类型为CV_64F,如果不需要旋转,则RR为单位阵
cv::Matx33d RR = cv::Matx33d::eye();
if (!R.empty() && R.total() * R.channels() == )
{
cv::Vec3d rvec;
R.getMat().convertTo(rvec, CV_64F);
RR = Affine3d(rvec).rotation();
}
else if (!R.empty() && R.size() == Size(, ))
R.getMat().convertTo(RR, CV_64F); //新的内参矩阵PP转换数据类型为CV_64F
cv::Matx33d PP = cv::Matx33d::eye();
if (!P.empty())
P.getMat().colRange(, ).convertTo(PP, CV_64F); //关键一步:新的内参矩阵*旋转矩阵,然后利用SVD分解求出逆矩阵iR,后面用到
cv::Matx33d iR = (PP * RR).inv(cv::DECOMP_SVD); //反向映射,遍历目标图像所有像素位置,找到畸变图像中对应位置坐标(u,v),并分别保存坐标(u,v)到mapx和mapy中
for( int i = ; i < size.height; ++i)
{
float* m1f = map1.getMat().ptr<float>(i);
float* m2f = map2.getMat().ptr<float>(i);
short* m1 = (short*)m1f;
ushort* m2 = (ushort*)m2f; //二维图像平面坐标系->摄像机坐标系
double _x = i*iR(, ) + iR(, ),
_y = i*iR(, ) + iR(, ),
_w = i*iR(, ) + iR(, ); for( int j = ; j < size.width; ++j)
{
//归一化摄像机坐标系,相当于假定在Z=1平面上
double x = _x/_w, y = _y/_w; //求鱼眼半球体截面半径r
double r = sqrt(x*x + y*y);
//求鱼眼半球面上一点与光心的连线和光轴的夹角Theta
double theta = atan(r);
//畸变模型求出theta_d,相当于有畸变的角度值
double theta2 = theta*theta, theta4 = theta2*theta2, theta6 = theta4*theta2, theta8 = theta4*theta4;
double theta_d = theta * ( + k[]*theta2 + k[]*theta4 + k[]*theta6 + k[]*theta8);
//利用有畸变的Theta值,将摄像机坐标系下的归一化三维坐标,重投影到二维图像平面,得到(j,i)对应畸变图像中的(u,v)
double scale = (r == ) ? 1.0 : theta_d / r;
double u = f[]*x*scale + c[];
double v = f[]*y*scale + c[]; //保存(u,v)坐标到mapx,mapy
if( m1type == CV_16SC2 )
{
int iu = cv::saturate_cast<int>(u*cv::INTER_TAB_SIZE);
int iv = cv::saturate_cast<int>(v*cv::INTER_TAB_SIZE);
m1[j*+] = (short)(iu >> cv::INTER_BITS);
m1[j*+] = (short)(iv >> cv::INTER_BITS);
m2[j] = (ushort)((iv & (cv::INTER_TAB_SIZE-))*cv::INTER_TAB_SIZE + (iu & (cv::INTER_TAB_SIZE-)));
}
else if( m1type == CV_32FC1 )
{
m1f[j] = (float)u;
m2f[j] = (float)v;
} //这三条语句是上面 ”//二维图像平面坐标系->摄像机坐标系“的一部分,是矩阵iR的第一列,这样写能够简化计算
_x += iR(, );
_y += iR(, );
_w += iR(, );
}
}
}
2.普通相机模型的畸变校正
同样建议参考OpenCV官方文档阅读代码 https://docs.opencv.org/3.0-beta/modules/calib3d/doc/camera_calibration_and_3d_reconstruction.html#。
主要流程和上面Fisheye模型差不多,只有第4部分的畸变模型不一样,普通相机的畸变模型如下:
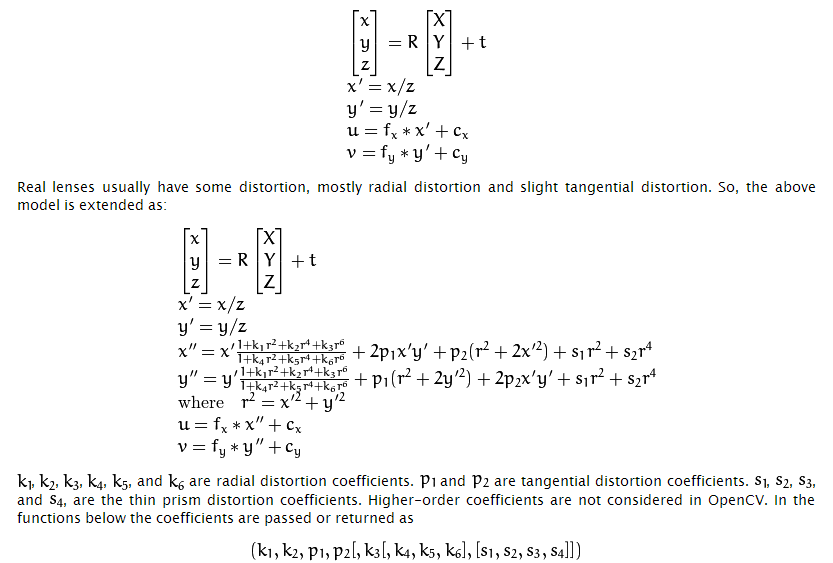
同样把源代码贴上,并加上注解:
#include <opencv2\opencv.hpp> void cv::initUndistortRectifyMap( InputArray _cameraMatrix, InputArray _distCoeffs,
InputArray _matR, InputArray _newCameraMatrix,
Size size, int m1type, OutputArray _map1, OutputArray _map2 )
{
Mat cameraMatrix = _cameraMatrix.getMat(), distCoeffs = _distCoeffs.getMat();
Mat matR = _matR.getMat(), newCameraMatrix = _newCameraMatrix.getMat(); if( m1type <= )
m1type = CV_16SC2;
CV_Assert( m1type == CV_16SC2 || m1type == CV_32FC1 || m1type == CV_32FC2 );
_map1.create( size, m1type );
Mat map1 = _map1.getMat(), map2;
if( m1type != CV_32FC2 )
{
_map2.create( size, m1type == CV_16SC2 ? CV_16UC1 : CV_32FC1 );
map2 = _map2.getMat();
}
else
_map2.release(); Mat_<double> R = Mat_<double>::eye(, );
Mat_<double> A = Mat_<double>(cameraMatrix), Ar; if( !newCameraMatrix.empty() )
Ar = Mat_<double>(newCameraMatrix);
else
Ar = getDefaultNewCameraMatrix( A, size, true ); if( !matR.empty() )
R = Mat_<double>(matR); if( !distCoeffs.empty() )
distCoeffs = Mat_<double>(distCoeffs);
else
{
distCoeffs.create(, , CV_64F);
distCoeffs = .;
} CV_Assert( A.size() == Size(,) && A.size() == R.size() );
CV_Assert( Ar.size() == Size(,) || Ar.size() == Size(, )); //LU分解求新的内参矩阵Ar与旋转矩阵R乘积的逆矩阵iR
Mat_<double> iR = (Ar.colRange(,)*R).inv(DECOMP_LU);
const double* ir = &iR(,); //从旧的内参矩阵中取出光心位置u0,v0,和归一化焦距fx,fy
double u0 = A(, ), v0 = A(, );
double fx = A(, ), fy = A(, ); //尼玛14个畸变系数,不过大多用到的只有(k1,k2,p1,p2),最多加一个k3,用不到的置为0
CV_Assert( distCoeffs.size() == Size(, ) || distCoeffs.size() == Size(, ) ||
distCoeffs.size() == Size(, ) || distCoeffs.size() == Size(, ) ||
distCoeffs.size() == Size(, ) || distCoeffs.size() == Size(, ) ||
distCoeffs.size() == Size(, ) || distCoeffs.size() == Size(, ) ||
distCoeffs.size() == Size(, ) || distCoeffs.size() == Size(, )); if( distCoeffs.rows != && !distCoeffs.isContinuous() )
distCoeffs = distCoeffs.t(); const double* const distPtr = distCoeffs.ptr<double>();
double k1 = distPtr[];
double k2 = distPtr[];
double p1 = distPtr[];
double p2 = distPtr[];
double k3 = distCoeffs.cols + distCoeffs.rows - >= ? distPtr[] : .;
double k4 = distCoeffs.cols + distCoeffs.rows - >= ? distPtr[] : .;
double k5 = distCoeffs.cols + distCoeffs.rows - >= ? distPtr[] : .;
double k6 = distCoeffs.cols + distCoeffs.rows - >= ? distPtr[] : .;
double s1 = distCoeffs.cols + distCoeffs.rows - >= ? distPtr[] : .;
double s2 = distCoeffs.cols + distCoeffs.rows - >= ? distPtr[] : .;
double s3 = distCoeffs.cols + distCoeffs.rows - >= ? distPtr[] : .;
double s4 = distCoeffs.cols + distCoeffs.rows - >= ? distPtr[] : .;
double tauX = distCoeffs.cols + distCoeffs.rows - >= ? distPtr[] : .;
double tauY = distCoeffs.cols + distCoeffs.rows - >= ? distPtr[] : .; //tauX,tauY这个是什么梯形畸变,用不到的话matTilt为单位阵
// Matrix for trapezoidal distortion of tilted image sensor
cv::Matx33d matTilt = cv::Matx33d::eye();
cv::detail::computeTiltProjectionMatrix(tauX, tauY, &matTilt); for( int i = ; i < size.height; i++ )
{
float* m1f = map1.ptr<float>(i);
float* m2f = map2.empty() ? : map2.ptr<float>(i);
short* m1 = (short*)m1f;
ushort* m2 = (ushort*)m2f; //利用逆矩阵iR将二维图像坐标(j,i)转换到摄像机坐标系(_x,_y,_w)
double _x = i*ir[] + ir[], _y = i*ir[] + ir[], _w = i*ir[] + ir[]; for( int j = ; j < size.width; j++, _x += ir[], _y += ir[], _w += ir[] )
{
//摄像机坐标系归一化,令Z=1平面
double w = ./_w, x = _x*w, y = _y*w;
//这一部分请看OpenCV官方文档,畸变模型部分
double x2 = x*x, y2 = y*y;
double r2 = x2 + y2, _2xy = *x*y;
double kr = ( + ((k3*r2 + k2)*r2 + k1)*r2)/( + ((k6*r2 + k5)*r2 + k4)*r2);
double xd = (x*kr + p1*_2xy + p2*(r2 + *x2) + s1*r2+s2*r2*r2);
double yd = (y*kr + p1*(r2 + *y2) + p2*_2xy + s3*r2+s4*r2*r2);
//根据求取的xd,yd将三维坐标重投影到二维畸变图像坐标(u,v)
cv::Vec3d vecTilt = matTilt*cv::Vec3d(xd, yd, );
double invProj = vecTilt() ? ./vecTilt() : ;
double u = fx*invProj*vecTilt() + u0;
double v = fy*invProj*vecTilt() + v0;
//保存u,v的值到Mapx,Mapy中
if( m1type == CV_16SC2 )
{
int iu = saturate_cast<int>(u*INTER_TAB_SIZE);
int iv = saturate_cast<int>(v*INTER_TAB_SIZE);
m1[j*] = (short)(iu >> INTER_BITS);
m1[j*+] = (short)(iv >> INTER_BITS);
m2[j] = (ushort)((iv & (INTER_TAB_SIZE-))*INTER_TAB_SIZE + (iu & (INTER_TAB_SIZE-)));
}
else if( m1type == CV_32FC1 )
{
m1f[j] = (float)u;
m2f[j] = (float)v;
}
else
{
m1f[j*] = (float)u;
m1f[j*+] = (float)v;
}
}
}
}
如有错误,望不吝赐教!
另附上CUDA实现两种畸变校正方法的代码,放在我的码云上:https://gitee.com/rxdj/camera-calibration.git。见cudaUndistort中的两个.cu文件
OpenCV畸变校正源代码分析的更多相关文章
- OpenCV畸变校正原理以及损失有效像素原理分析
上一篇博客简要介绍了一下常用的张正友标定法的流程,其中获取了摄像机的内参矩阵K,和畸变系数D. 1.在普通相机cv模型中,畸变系数主要有下面几个:(k1; k2; p1; p2[; k3[; k4; ...
- OpenCV两种畸变校正模型源代码分析以及CUDA实现
图像算法中会经常用到摄像机的畸变校正,有必要总结分析OpenCV中畸变校正方法,其中包括普通针孔相机模型和鱼眼相机模型fisheye两种畸变校正方法. 普通相机模型畸变校正函数针对OpenCV中的cv ...
- OpenCV亚像素角点cornerSubPixel()源代码分析
上一篇博客中讲到了goodFeatureToTrack()这个API函数能够获取图像中的强角点.但是获取的角点坐标是整数,但是通常情况下,角点的真实位置并不一定在整数像素位置,因此为了获取更为精确的角 ...
- 【OpenCV】摄像机标定+畸变校正
摄像机标定 本文目的在于记录如何使用MATLAB做摄像机标定,并通过OpenCV进行校正后的显示. 首先关于校正的基本知识通过OpenCV官网的介绍即可简单了解: http://docs.open ...
- 车牌定位与畸变校正(python3.7,opencv4.0)
一.前言及思路简析 目前车牌识别系统在各小区门口随处可见,识别效果貌似都还可以.查阅资料后,发现整个过程又可以细化为车牌定位.畸变校正.车牌分割和内容识别四部分.本篇随笔主要介绍车牌定位及畸变校正两部 ...
- Matlab 摄像机标定+畸变校正
博客转载自:http://blog.csdn.net/Loser__Wang/article/details/51811347 本文目的在于记录如何使用MATLAB做摄像机标定,并通过opencv进行 ...
- cocos2d-x 源代码分析 总文件夹
这篇博客用来整理与cocos2d-x相关的工作,仅仅要有新的分析.扩展或者改动,都会更改此文章. 祝大家愉快~ 1.源代码分析 1.CCScrollView源代码分析 http://blog.csdn ...
- android-plugmgr源代码分析
android-plugmgr是一个Android插件加载框架,它最大的特点就是对插件不需要进行任何约束.关于这个类库的介绍见作者博客,市面上也有一些插件加载框架,但是感觉没有这个好.在这篇文章中,我 ...
- [翻译]利用顶点位移的VR畸变校正
文章英文原网址: http://www.gamasutra.com/blogs/BrianKehrer/20160125/264161/VR_Distortion_Correction_using_V ...
随机推荐
- mysql 时间函数 时间转换函数
时间函数 Now 获取当前时间 current_timestamp 获取当前时间 localtimestamp 时间转换 UNIX_TIMESTAMP "2009-09-15 00:0 ...
- ElasticSearch入门(2) —— 基础概念
在Elasticsearch中,文档归属于一种类型(type),而这些类型存在于索引(index)中,我们可以画一些简单的对比图来类比传统关系型数据库: Relational DB -> Dat ...
- 关于逆元的概念、用途和可行性的思考(附51nod 1013 和 51nod 1256)
[逆元的概念] 逆元和单位元这个概念在群中的解释是: 逆元是指数学领域群G中任意一个元素a,都在G中有唯一的逆元a',具有性质a×a'=a'×a=e,其中e为该群的单位元. 群的概念是: 如果独异 ...
- excel表格数据导入数据库Oracle
方法一: 1.创建数据表 CREATE TABLE T_USER ( ID VARCHAR2(32) primary key, NAME VARCH ...
- File FileStream StreamWriter StreamReader文件读写操作方法
string path = "D:\\AccountChecking\\Test.txt"; string content = "abcdefg\r\nhigklmn\r ...
- python之testcenter操作
一.设置python环境 1. 从以下路径中将StcPython.py文件拷贝出来 Linux: /Installdir/Spirent_TestCenter_4.xx/Spirent_TestCen ...
- C#中 什么是装箱和拆箱
装箱:将值类型包装为引用类型 拆箱:将引用类型转换为值类型 例如 objetct obj = null; obj = ; //装箱 int i = (int) obj; //拆箱
- Python通过future处理并发
future初识 通过下面脚本来对future进行一个初步了解:例子1:普通通过循环的方式 import os import time import sys import requests POP20 ...
- 为什么阿里的程序员那么帅?---原来他们都有"编码规约扫描"神器在手
为了迎接十九大的到来,帝都城这几天也是满城风雨,听说早高峰期地铁站的人都排到天桥上了,哎,这就是该死的北漂生活.但是无论怎样,我依然在北京向各位问好! 之前总结过俩篇关于阿里Java开发手册的编程规约 ...
- 【转载】小tips: PC端传统网页试试使用Zepto.js进行开发
Zepto.js设计之初专为移动端,不对一些古董浏览器支持.所以,尺寸很小,压缩后20K多一点,但是,jQuery压缩后,3.*版本要80多K,1.*版本则要90多K,4倍差距. 由于每个页面都会使用 ...