opencv——图像的灰度处理(线性变换/拉伸/直方图/均衡化)
实验内容及实验原理:
1、灰度的线性变换
灰度的线性变换就是将图像中所有的点的灰度按照线性灰度变换函数进行变换。该线性灰度变换函数是一个一维线性函数:f(x)=a*x+b
其中参数a为线性函数的斜率,b为线性函数的在y轴的截距,x表示输入图像的灰度,f(x)表示输出图像的灰度。
要求:输入一幅图像,根据输入的斜率和截距进行线性变换,并显示。
2、灰度拉伸
灰度拉伸和灰度线性变换相似。不同之处在于它是分段线性变换。表达式如下:
其中,x1和x2是分段函数的转折点。
要求:输入一幅图像,根据选择的转折点,进行灰度拉伸,显示变换后的图像。
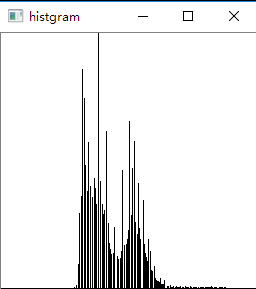
3、灰度直方图
灰度直方图是灰度值的函数,描述的是图像中具有该灰度值的像素的个数,其横坐标表示像素的灰度级别,纵坐标表示该灰度出现的频率(象素的个数)。
要求:输入一幅图像,显示它的灰度直方图,可以根据输入的参数(上限、下限)显示特定范围的灰度直方图。
4、直方图均衡:要求
1) 显示一幅图像pout.bmp的直方图;
2) 用直方图均衡对图像pout.bmp进行增强;
3) 显示增强后的图像。
实验过程:
打开原图像,创建结果图像:
IplImage *src = cvLoadImage("pout.bmp", 1);//原图
IplImage *dst =cvCreateImage(cvSize(src->width, src->height), IPL_DEPTH_8U, 1);函数说明:
CVAPI(IplImage*)cvLoadImage( constchar* filename, intiscolorCV_DEFAULT (CV_LOAD_IMAGE_COLOR));
//Iscolor的值:
enum{
/* 8bit, color ornot */ CV_LOAD_IMAGE_UNCHANGED =-1,
/* 8bit, gray */ CV_LOAD_IMAGE_GRAYSCALE =0,
/* ?, color */ CV_LOAD_IMAGE_COLOR =1,
/* any depth, ? */ CV_LOAD_IMAGE_ANYDEPTH =2,
/* ?, any color */ CV_LOAD_IMAGE_ANYCOLOR =4,
/* ?, no rotate */ CV_LOAD_IMAGE_IGNORE_ORIENTATION =128
};
CVAPI(IplImage*) cvCreateImage( CvSizesize, intdepth, intchannels );
@param size Imagewidth and height
@param depth Bitdepth of image elements. See IplImage for valid depths.
@param channelsNumber of channels per pixel. See IplImage for details. This function onlycreates
images withinterleaved channels.图像显示:
cvNamedWindow("Image", 1);//创建窗口
cvShowImage("Image", dst);//显示图像,在指定窗口显示制定图像
cvWaitKey(0); //等待按键
cvDestroyWindow("Image");//销毁窗口
//函数说明
CVAPI(int)cvNamedWindow( constchar* name, intflagsCV_DEFAULT(CV_WINDOW_AUTOSIZE) );
Flags:
CV_WINDOW_NORMAL =0x00000000, //the user canresize the window (no constraint) / alsouse to switch a fullscreen window to a normal size
CV_WINDOW_AUTOSIZE = 0x00000001, //the user cannot resize the window, the size isconstrainted by the image displayed
CV_WINDOW_OPENGL =0x00001000, //window with openglsupport灰度线性变换
对图像的每个像素遍历,获取原图像的灰度值,然后计算线性变换后的值,设置目标图像相应位置的灰度值
for (int i = 0;i < src->height; i++){
for (int j = 0; j < src->width; j++){
CvScalar s =cvGet2D(src, i, j);
s.val[0] = fa * s.val[0] + fb;
cvSet2D(dst, i, j, s);
}
}
//函数说明:
//参数为图像指针和坐标,如果指定位置不存在则返回0
CVAPI(CvScalar)cvGet2D( constCvArr* arr, intidx0, intidx1 );
The functions returna specific array element. In the case of a sparse array the functions return 0
if the requestednode does not exist (no new node is created by the functions).
@param arr Inputarray
@param idx0 Thefirst zero-based component of the element index
//返回值类型:
typedefstructCvScalar{
double val[4];
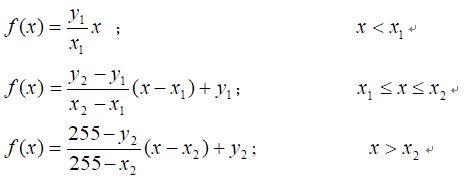
}变换前:
变换后:

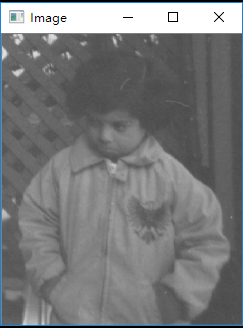
灰度拉伸
根据当前灰度值所处的区间进行相应的变换
for (int i = 0;i < src->height; i++){
for (int j = 0; j < src->width; j++){
CvScalar s =cvGet2D(src, i, j);
if(s.val[0] < x1)
s.val[0] = y1 / x1*s.val[0];
elseif (s.val[0] <= x2)
s.val[0] = (y2 - y1) / (x2 -x1)*(s.val[0] - x1) + y1;
else
s.val[0] = (255 - y2) / (255 -x2)*(s.val[0] - x2) + y2;
cvSet2D(dst, i, j, s);
}
}变换前:
变换后:
灰度直方图
将灰度分为256个离散的值进行统计,存放在table数组中
for (int i = 0;i < src->height; i++){
for (int j = 0; j < src->width; j++){
CvScalar s =cvGet2D(src, i, j);
table[(int)s.val[0]]++;
}
}
//找出灰度出现次数的最大值,以对直方图进行缩放
for (int i = 0;i < 256; i++)
if (table[i]> max)max = table[i];
//创建直方图:
Mat histgram(256, 256, CV_8U, Scalar(255));
//构造函数说明:
/** @overload
@param rows Numberof rows in a 2D array.
@param cols Numberof columns in a 2D array.
@param type Arraytype. Use CV_8UC1...CV_64FC4 to create 1-4 channel matrices, orCV_8UC(n)...CV_64FC(n) to create multi-channel (up toCV_CN_MAX channels) matrices.
@param s An optionalvalue to initialize each matrix element with. To set all the matrix elements tothe particular value after the construction, use theassignment operator
Mat::operator=(constScalar& value) .
*/
Mat(introws, intcols, inttype, constScalar& s);//s是所有像素的初始化值
//绘制直方图:在指定的范围内画线,线的长度为指定会的像素个数,并且缩放到255之间
for (int i =range[0]; i <= range[1]; i++)
line(histgram, Point(i,255), Point(i, (255 - table[i]*255/max)), Scalar(0));直方图:
直方图均衡
计算累计直方图并取整确定映射关系:
for (int i = 1;i < 256; i++){
s_table[i%2] = s_table[(i - 1)%2] + (float)table[i] / sum;
new_table[i] = (int)(s_table[i%2]* 255 + 0.5);
}用新值绘制新图
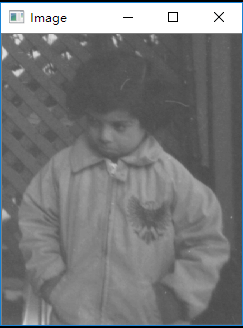
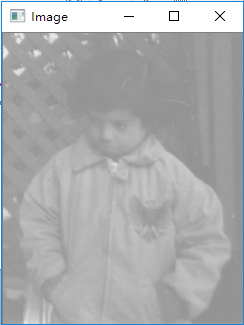
均衡前:
均衡后:

源码:
// opencv1.cpp: 定义控制台应用程序的入口点。
//
#include "stdafx.h"
#include<iostream>
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <cv.h>
//#include <highgui.h>
#include <cxcore.h>
#include <cvaux.h>
#include <stdlib.h>
#include <imgproc.hpp>
using namespace cv;
int main()
{
IplImage *src;
src = cvLoadImage("pout.bmp", 1);//原图
IplImage *dst = cvCreateImage(cvSize(src->width, src->height), IPL_DEPTH_8U, 1);
std::cout << "灰度线性变换..."<<std::endl;
double fa = 1.0, fb = 0.0;
while (fa >= 0)
{
for (int i = 0; i < src->height; i++)
{
for (int j = 0; j < src->width; j++)
{
CvScalar s = cvGet2D(src, i, j);
s.val[0] = fa * s.val[0] + fb;
cvSet2D(dst, i, j, s);
}
}
cvNamedWindow("Image", 1);//创建窗口
cvShowImage("Image", dst);//显示图像
cvWaitKey(0); //等待按键
cvDestroyWindow("Image");//销毁窗口
std::cin >> fa >> fb;
}
std::cout << "灰度拉伸..."<<std::endl;
double x1 = 0.0, y1 = 0.0, x2 = 1.0, y2 = 1.0;
while (x1 >= 0)
{
for (int i = 0; i < src->height; i++)
{
for (int j = 0; j < src->width; j++)
{
CvScalar s = cvGet2D(src, i, j);
if (s.val[0] < x1)
{
s.val[0] = y1 / x1*s.val[0];
}
else if (s.val[0] <= x2)
{
s.val[0] = (y2 - y1) / (x2 - x1)*(s.val[0] - x1) + y1;
}
else
{
s.val[0] = (255 - y2) / (255 - x2)*(s.val[0] - x2) + y2;
}
cvSet2D(dst, i, j, s);
}
}
cvNamedWindow("Image", 1);//创建窗口
cvShowImage("Image", dst);//显示图像
cvWaitKey(0); //等待按键
cvDestroyWindow("Image");//销毁窗口
std::cin >> x1 >> y1 >> x2 >> y2;
}
std::cout << "灰度直方图..." << std::endl;
int table[256] = { 0 };
int range[] = { 0, 255 };
std::cin >> range[0] >> range[1];
for (int i = 0; i < src->height; i++)
{
for (int j = 0; j < src->width; j++)
{
CvScalar s = cvGet2D(src, i, j);
table[(int)s.val[0]]++;
}
}
double max = 0;
int sum = 0;
for (int i = 0; i < 256; i++)
{
sum += table[i];
if (table[i] > max)max = table[i];
//std::cout << table[i] << std:: endl;
}
Mat histgram(256, 256, CV_8U, Scalar(255));
for (int i = range[0]; i <= range[1]; i++)
{
line(histgram, Point(i, 255), Point(i, (255 - table[i]*255/max)), Scalar(0));
}
namedWindow("histgram");
imshow("histgram", histgram);
waitKey(0);
std::cout << "灰度均衡直方图..." << std::endl;
int new_table[256] = { 0 };
float s_table[2] = { (float)table[0]/sum };
for (int i = 1; i < 256; i++)
{
s_table[i%2] = s_table[(i - 1)%2] + (float)table[i] / sum;
new_table[i] = (int)(s_table[i%2] * 255 + 0.5);
}
for (int i = 0; i < src->height; i++)
{
for (int j = 0; j < src->width; j++)
{
CvScalar s = cvGet2D(src, i, j);
s.val[0] =new_table[(int)s.val[0]];
cvSet2D(dst, i, j, s);
}
}
cvNamedWindow("Image", 1);//创建窗口
cvShowImage("Image", dst);//显示图像
cvWaitKey(0); //等待按键
cvDestroyWindow("Image");//销毁窗口
cvReleaseImage(&dst); //释放图像
}
原图:(原来是bmp格式的,但是不能上传,改成png格式了,分辨率都是256X256的)

opencv——图像的灰度处理(线性变换/拉伸/直方图/均衡化)的更多相关文章
- OpenCV计算机视觉学习(9)——图像直方图 & 直方图均衡化
如果需要处理的原图及代码,请移步小编的GitHub地址 传送门:请点击我 如果点击有误:https://github.com/LeBron-Jian/ComputerVisionPractice 1, ...
- OpenCV2马拉松第9圈——再谈对照度(对照度拉伸,直方图均衡化)
收入囊中 lookup table 对照度拉伸 直方图均衡化 葵花宝典 lookup table是什么东西呢? 举个样例,假设你想把图像颠倒一下,f[i] = 255-f[i],你会怎么做? for( ...
- OpenCV图像增强算法实现(直方图均衡化、拉普拉斯、Log、Gamma)
http://blog.csdn.net/dcrmg/article/details/53677739 1. 基于直方图均衡化的图像增强 直方图均衡化是通过调整图像的灰阶分布,使得在0~255灰阶 ...
- opencv —— equalizeHist 直方图均衡化实现对比度增强
直方图均匀化简介 从这张未经处理的灰度图可以看出,其灰度集中在非常小的一个范围内.这就导致了图片的强弱对比不强烈. 直方图均衡化的目的,就是把原始的直方图变换为在整个灰度范围(0~255)内均匀分布的 ...
- OpenCV——直方图均衡化(用于图像增强)
#include <opencv2/opencv.hpp> #include <iostream> #include <math.h> using namespac ...
- 图像增强算法(直方图均衡化、拉普拉斯、Log、伽马变换)
一.图像增强算法原理 图像增强算法常见于对图像的亮度.对比度.饱和度.色调等进行调节,增加其清晰度,减少噪点等.图像增强往往经过多个算法的组合,完成上述功能,比如图像去燥等同于低通滤波器,增加清晰度则 ...
- OpenCV-跟我一起学数字图像处理之直方图均衡化
从这篇博文开始,小生正式从一个毫不相干专业转投数字图像处理.废话不多说了,talk is cheap. show me the code. 直方图均衡化目的 由于一些图像灰度的分布过于集中,这样会导致 ...
- opencv——图像直方图与反向投影
引言 在图像处理中,对于直方图这个概念,肯定不会陌生.但是其原理真的可以信手拈来吗? 本文篇幅有点长,在此列个目录,大家可以跳着看: 分析图像直方图的概念,以及opencv函数calcHist()对于 ...
- opencv图像直方图均衡化及其原理
直方图均衡化是什么有什么用 先说什么是直方图均衡化,通俗的说,以灰度图为例,原图的某一个像素为x,经过某个函数变为y.形成新的图.新的图的灰度值的分布是均匀的,这个过程就叫直方图均衡化. 图像直方图均 ...
随机推荐
- Codeforces 701E Connecting Universities 贪心
链接 Codeforces 701E Connecting Universities 题意 n个点的树,给你2*K个点,分成K对,使得两两之间的距离和最大 思路 贪心,思路挺巧妙的.首先dfs一遍记录 ...
- vue 父子组件传值以及方法调用,平行组件之间传值以及方法调用大全
vue项目经常需要组件间的传值以及方法调用,具体场景就不说了,都知道.基本上所有的传值都可以用vuex状态管理来实现,只要在组件内监听vuex就好. vue常用的传值方式以及方法有: 1. 父值传子( ...
- 唯品会API网关设计与实践--转
原文地址:https://609518.kuaizhan.com/86/70/p4108366952248f 刘璟宇Leo 唯品会资深研发工程师,在大型高性能分布式系统设计和开发方面有丰富的经验.目前 ...
- springMVC下ajax获取后台参数直接走错误或者报406错误问题解决
直接走错误: 返回的结果是否json化,直接返回非字符串的结果会走ajax的error函数. 报406错误: 我在学习springmvc过程中(我的项目是配置的后缀是.html),从controlle ...
- 人生苦短,请用 Chrome!
在网络层,互联网提供所有应用程序都要使用的两种类型的服务,尽管目前理解这些服务的细节并不重要,但在所有TCP/IP概述中,都不能忽略他们: 无连接分组交付服务(Connectionless Packe ...
- 简述Sql Server中常用的数据库对象(面试题)
1.表(Table ) 数据库中的表与我们日常生活中使用的表格类似,它也是由行(Row) 和列(Column)组成的.列由同类的信息组成,每列又称为一个字段,每列的标题称为字段名.行包括了若干列信息项 ...
- C++之指针与引用,函数和数组
]={,,}; //ptr是指针,该指针类型是int[3] ]=&arr; cout << **ptr << endl;//第一次解指针时得到数组地址,第二次解指针取数 ...
- Windows环境下使用Guard整合Compass和Livereload进行SASS的开发
配置运行环境 Guard,Compass 和 Livereload 是 Ruby 的 Gem 套件,需要 Ruby 运行环境.另外还需要安装 Ruby 的扩展开发包 Development-Kit,以 ...
- HDU 3584 Cube 【 三维树状数组 】
题意:还是那篇论文里面讲到的,三维树状数组http://wenku.baidu.com/view/1e51750abb68a98271fefaa8画个立方体出来对照一下好想一点 #include< ...
- eclipse的maven工程视图切换
上面图切换成下面图: 点击eclipse右上角,如下图红圈,然后在选择javaEE这样就切换成javaEE视图了