LK光流算法公式详解
由于工程需要用到 Lucas-Kanade 光流,在此进行一下简单整理(后续还会陆续整理关于KCF,PCA,SVM,最小二乘、岭回归、核函数、dpm等等):
光流,简单说也就是画面移动过程中,图像上每个像素的x,y位移量,比如第t帧的时候A点的位置是(x1, y1),那么我们在第t+1帧的时候再找到A点,假如它的位置是(x2,y2),那么我们就可以确定A点的运动了:(u, v) = (x2, y2) - (x1,y1)
1、假设原图是I(x,y,z) (这里是扩展到三维空间的,所以还有个z值),移动后的图像是I(x+δx,y+δy,z+δz,t+δt),两者满足:

2、其中图像移动可以认为I (x ,y ,z ,t ) = I (x + δx ,y + δy ,z + δz ,t + δt )
也就是说: ( H.O.T. 指更高阶,在移动足够小的情况下可以忽略)
( H.O.T. 指更高阶,在移动足够小的情况下可以忽略)
3、从这个方程中我们可以得到:

其中Vx = u, Vy=v,也就是光流的值(二维图像没有z),

 则是图像在(x ,y,z ,t )这一点的梯度 (
则是图像在(x ,y,z ,t )这一点的梯度 ( 就是两帧图像块之间差值) 。
就是两帧图像块之间差值) 。
4、假设流(Vx,Vy,Vz)在一个大小为m*m*m(m>1)的小窗中是一个常数,那么从像素1...n , n = m*m*m 中可以得到下列一组方程:




三个未知数但是有多于三个的方程,这个方程组自然是个超定方程,也就是说方程组内有冗余,方程组可以表示为:
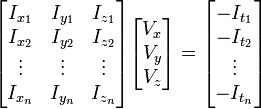
也就是:
采用最小二乘法:

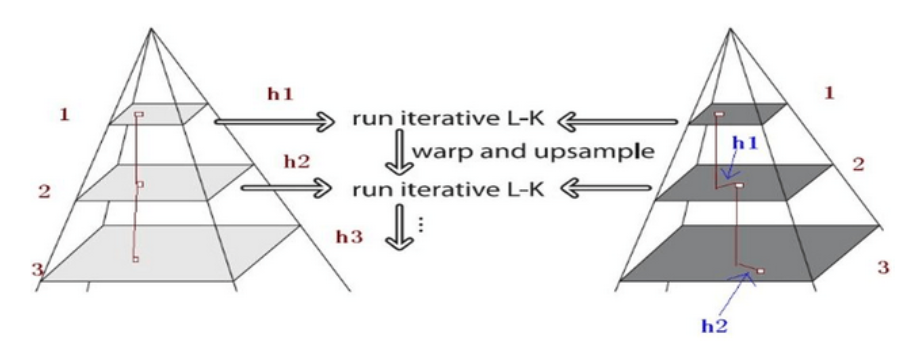
5、另外,由于LK算法假设是小位移,为了解决大位移问题,需要在多层图像缩放金字塔上求解,每一层的求解结果乘以2后加到下一层:
6、具体就见matlab代码:
其中求解最小二乘的行列式求解只有2维所以计算量尚可容忍
%Data acquisition
im1= ((imread('1.png')));
im2= ((imread('2.png')));
im1=single(im1);
im2=single(im2);
[result,corner_count,ptx,pty] = harris(im1); //harris角点是求光流的关键点
imagesc(result);
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%parameters : levels number, window size, iterations number, regularization
numLevels= 4;
window= 10;
iterations=3;
alpha = 0.001;
hw = floor(window/2);
t0 = clock;
%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%pyramids creation
pyramid1 = im1;
pyramid2 = im2;
%init
for i=2:numLevels
im1 = impyramid(im1, 'reduce');
im2 = impyramid(im2, 'reduce');
pyramid1(1:size(im1,1), 1:size(im1,2), i) = im1;
pyramid2(1:size(im2,1), 1:size(im2,2), i) = im2;
end;
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%Processing all levels
for p = 1:numLevels
%current pyramid
im1 = pyramid1(1:(size(pyramid1,1)/(2^(numLevels - p))), 1:(size(pyramid1,2)/(2^(numLevels - p))), (numLevels - p)+1);
im2 = pyramid2(1:(size(pyramid2,1)/(2^(numLevels - p))), 1:(size(pyramid2,2)/(2^(numLevels - p))), (numLevels - p)+1);
%init
if p==1
u = zeros(size(im1));
v = zeros(size(im1));
else
%resizing
u = 2 * imresize(u,size(u)*2,'bilinear');
v = 2 * imresize(v,size(v)*2,'bilinear');
end
%refinment loop
for r = 1:iterations
u=round(u);
v=round(v);
%every pixel loop
for i = 1+hw:size(im1,1)-hw
for j = 1+hw:size(im2,2)-hw
patch1 = im1(i-hw:i+hw, j-hw:j+hw);
%moved patch
lr = i-hw+v(i,j);
hr = i+hw+v(i,j);
lc = j-hw+u(i,j);
hc = j+hw+u(i,j);
if (lr < 1)||(hr > size(im1,1))||(lc < 1)||(hc > size(im1,2))
%Regularized least square processing
else
patch2 = im2(lr:hr, lc:hc);
fx = conv2(patch1, 0.25* [-1 1; -1 1]) + conv2(patch2, 0.25*[-1 1; -1 1]);
fy = conv2(patch1, 0.25* [-1 -1; 1 1]) + conv2(patch2, 0.25*[-1 -1; 1 1]);
ft = conv2(patch1, 0.25*ones(2)) + conv2(patch2, -0.25*ones(2));
Fx = fx(2:window-1,2:window-1)';
Fy = fy(2:window-1,2:window-1)';
Ft = ft(2:window-1,2:window-1)';
A = [Fx(:) Fy(:)];
G=A'*A;
G(1,1)=G(1,1)+alpha; G(2,2)=G(2,2)+alpha;
U=1/(G(1,1)*G(2,2)-G(1,2)*G(2,1))*[G(2,2) -G(1,2);-G(2,1) G(1,1)]*A'*-Ft(:);
u(i,j)=u(i,j)+U(1); v(i,j)=v(i,j)+U(2);
end
end
end
end
etime(clock,t0)
end
LK光流算法公式详解的更多相关文章
- HS光流算法详解<转载>
HS 光流法详解 前言 本文较为详细地介绍了一种经典的光流法 - HS 光流法. 光流法简介 当人的眼睛与被观察物体发生相对运动时,物体的影像在视网膜平面上形成一系列连续变化的图像,这一系列变化的图像 ...
- 光流法详解之一(LK光流)
Lucas–Kanade光流算法是一种两帧差分的光流估计算法.它由Bruce D. Lucas 和 Takeo Kanade提出 [1]. LK光流法有三个假设条件: 1. 亮度恒定:一个像素点随着时 ...
- 光流法详解之二(HS光流)
Horn–Schunck光流算法[1]是一种全局方法估算光流场. 参考博文:https://blog.csdn.net/hhyh612/article/details/79216021 假设条件: H ...
- HS 光流法详解
前言 本文较为详细地介绍了一种经典的光流法 - HS 光流法. 光流法简介 当人的眼睛与被观察物体发生相对运动时,物体的影像在视网膜平面上形成一系列连续变化的图像,这一系列变化的图像信息不断 &quo ...
- AVL树详解
AVL树 参考了:http://www.cppblog.com/cxiaojia/archive/2012/08/20/187776.html 修改了其中的错误,代码实现并亲自验证过. 平衡二叉树(B ...
- C++构造函数详解及显式调用构造函数
来源:http://www.cnblogs.com/xkfz007/archive/2012/05/11/2496447.html c++类的构造函数详解 ...
- C++中构造函数详解及显式调用构造函数
C++构造函数详解及显式调用构造函数 c++类的构造函数详解 一. 构造函 ...
- LK 光流法简介
前言 若假定一个局部区域的像素运动是一致的,则可以用这个新的约束条件替代前文中提到的全局速度平滑约束条件.这种光流算法就叫做 LK 光流法. LK 光流法的推导 首先,需要推导出光流约束方程. 这一步 ...
- C++11 并发指南------std::thread 详解
参考: https://github.com/forhappy/Cplusplus-Concurrency-In-Practice/blob/master/zh/chapter3-Thread/Int ...
随机推荐
- System.Data.EntityException: The underlying provider failed on Open.
场景:IIS默认站点建立程序,使用Windows集成身份验证方式,连接SQLServer数据库也是采用集成身份验证.我报“System.Data.EntityException: The underl ...
- c# 粘贴复制
复制 1. 复制 Clipboard.SetText("123456"); Clipboard.SetImage(Image img); Clipboard.SetAudio(Sy ...
- UML中的类图
模型 类 接口 关系 关联关系 描述了类的结构之间的关系.具有方向.名字.角色和多重性等信息.一般的关联关系语义较弱.也有两种语义较强,分别是聚合与组合 聚合 特殊关联关系,指明一个聚集(整体)和组成 ...
- jQuery实现购物车效果
简单的购物车效果 <!DOCTYPE html> <html> <head> <meta charset="utf-8"> < ...
- 流媒体服务器搭建 ffmpeg + nginx
第一部分: mkdir ~/working 切换到~/working目录下 cd ~/working 获取nginx源码: wget http://nginx.org/download/nginx-1 ...
- IEAD工具教你创建maven项目
之前一直用的是其他的开发工具,maven到目前为止也就用了3个月,今天又时间整理一些初期的使用方法,仅供参照. 为什么要用maven 原因很简单,因为使用maven,会使得项目非常容易管理. 举个例子 ...
- 【Distributed】限流技巧
一.概述 1.1 高并发服务限流特技 1.2 为什么要互联网项目要限流 1.3 高并发限流解决方案 二.限流算法 2.1 计数器 2.2 滑动窗口计数 2.3 令牌桶算法 使用RateLimiter实 ...
- Shell 语法报错记录
sh: missing ] if 条件语句 “或”多个条件并行时 执行then命令 变量a等于aa且变量b等于bb 或者 变量c等于cc且变量d等于dd 这样的条件成立的话,输出success if ...
- okhttp连接池:put,get方法&connection回收
OkHttp连接池put和get方法: 在上一次[https://www.cnblogs.com/webor2006/p/9281429.html]咱们分析了连接拦截器,如下: 不管是Http1.0还 ...
- ubuntu 完全干净的卸载docker
1. 删除某软件,及其安装时自动安装的所有包 sudo apt-get autoremove docker docker-ce docker-engine docker.io containerd r ...