【STM32H7教程】第18章 STM32H7的GPIO应用之跑马灯
完整教程下载地址:http://www.armbbs.cn/forum.php?mod=viewthread&tid=86980
第18章 STM32H7的GPIO应用之跑马灯
本章教程为大家介绍STM32H7的GPIO应用之跑马灯,跑马灯作为经典的测试例程,可以让大家对STM32H7应用有个简单的整体认识。
18.1 初学者重要提示
18.2 跑马灯硬件设计
18.3 跑马灯软件驱动设计
18.4 跑马灯板级支持包(bsp_led.c)
18.5 实验例程设计框架
18.6 跑马灯驱动移植和使用
18.7 实验例程说明(MDK)
18.8 实验例程说明(IAR)
18.9 总结
18.1 初学者重要提示
- 学习本章节前,务必保证已经学习了第15,16和17章。
- 虽然是跑马灯的初级例程,但有必要掌握程序的基本设计框架,后面的例子都是建立在这个框架的基础上。
- LED不是用CPU的IO直接驱动,而是由74HC574驱动的,74HC574是一个8路并口缓冲器,挂在FMC总线上,实现IO扩展。也许初学者会问为什么要做IO扩展,不是已经用了240脚的STM32H743XIH6吗?因为开发板使用了32位SDRAM和RGB888硬件接口,消耗IO巨大,所以必须得扩展了。
- 对于初学者来说,仅需掌握LED驱动的实现方法和对应的API调用即可,需要深入的理解IO扩展部分,会在后面的第48章节进行详细讲解。
- FMC总线扩展32路高速IO理解成GPIO的ODR寄存器就很简单了,其实就是一个东西。
- FMC扩展IO是对地址0x60001000的32bit数据空间的0和1的操作。GPIOA的ODR寄存器是对地址 0x40000000 + 0x18020000 + 0x14 空间的操作。但只能操作16个引脚。
使用总线的优势就在这里了,相当于在GPIOA到GPIOK的基础上,又扩展出GPIOL和GPIOM。
#define PERIPH_BASE ((uint32_t)0x40000000)
#define D3_AHB1PERIPH_BASE (PERIPH_BASE + 0x18020000)
#define GPIOA_BASE (D3_AHB1PERIPH_BASE + 0x0000)
#define GPIOA ((GPIO_TypeDef *) GPIOA_BASE) typedef struct
{
__IO uint32_t MODER; /*!< GPIO port mode register, Address offset: 0x00 */
__IO uint32_t OTYPER; /*!< GPIO port output type register, Address offset: 0x04 */
__IO uint32_t OSPEEDR; /*!< GPIO port output speed register, Address offset: 0x08 */
__IO uint32_t PUPDR; /*!< GPIO port pull-up/pull-down register, Address offset: 0x0C */
__IO uint32_t IDR; /*!< GPIO port input data register, Address offset: 0x10 */
__IO uint32_t ODR; /*!< GPIO port output data register, Address offset: 0x14 */
__IO uint16_t BSRRL; /*!< GPIO port bit set/reset low register, Address offset: 0x18 */
__IO uint16_t BSRRH; /*!< GPIO port bit set/reset high register, Address offset: 0x1A */
__IO uint32_t LCKR; /*!< GPIO port configuration lock register, Address offset: 0x1C */
__IO uint32_t AFR[]; /*!< GPIO alternate function registers, Address offset: 0x20-0x24 */
} GPIO_TypeDef;
18.2 跑马灯硬件设计
跑马灯的硬件设计如下:
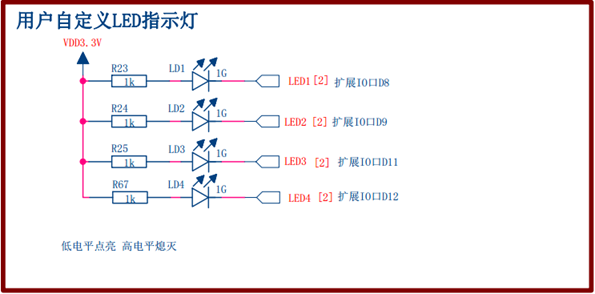
通过这个硬件设计,有如下四点需要学习:
18.2.1 灌电流驱动方式
关于拉电流、灌电流和相关的电气特性,在第15章的15.4小节做了专门的讲解。对于STM32H7来说,使用拉电流和灌电流驱动LED都是可以的,因为拉电流和灌电流时,STM32H7总的拉电流和灌电流都是不可超过140mA,单个引脚最大不可超过20mA。
开发板这里是采用的灌电流方式。
18.2.2 LED的压降和驱动电流
这种采用的是灌电流方式,而流经LED的电流大小是多少呢? 这里需要先补充一个基础的知识点。
直插超亮发光二极管压降,主要有三种颜色,然而三种发光二极管的压降都不相同,具体压降参考值如下:
- 红色发光二极管的压降为2.0V-2.2V。
- 黄色发光二极管的压降为1.8V-2.0V。
- 绿色发光二极管的压降为3.0V-3.2V。
- 正常发光时的额定电流约为20mA。
贴片LED压降:
- 红色的压降为1.82-1.88V,电流5-8mA。
- 绿色的压降为1.75-1.82V,电流3-5mA。
- 橙色的压降为1.7-1.8V,电流3-5mA。
- 蓝色的压降为3.1-3.3V,电流8-10mA。
- 白色的压降为3-3.2V,电流10-15mA。
实际测试开发板红色贴片LED的压降的确是1.8V左右,那么流过LED的电流就是
(3.3 – 1.8)/ 1K = 1.4mA
在不考虑二极管本身电阻的情况下,流过LED的电流就是1.4mA。
18.2.3 总线扩展
在教程第48章节详细讲解了这个问题,对于初学者来说,可以先不用看,等后面学习了FMC总线后再去看,就容易掌握多了。
18.2.4 贴片LED的正负极区分
仔细查看开发板版上面所使用的贴片LED,会发现一端有绿点,有绿点的这端是负极,而另一端就是正级了。

18.3 跑马灯软件驱动设计
跑马灯的软件驱动实现比较简单,主要是IO初始化,LED亮,LED灭,LED翻转。对应的驱动文件也是实现了这几个功能,没有特别的技巧,所以大家看源代码也比较省事。
18.4 跑马灯板级支持包(bsp_led.c)
LED驱动文件bsp_led.c主要实现了如下几个API:
- bsp_InitLed
- bsp_LedOn
- bsp_LedOff
- bsp_LedToggle
- bsp_IsLedOn
下面将这几个API逐一进行说明。
18.4.1 函数bsp_InitLed
函数原型:
/*
*********************************************************************************************************
* 函 数 名: bsp_InitLed
* 功能说明: 配置LED指示灯相关的GPIO, 该函数被 bsp_Init() 调用。
* 形 参: 无
* 返 回 值: 无
*********************************************************************************************************
*/
void bsp_InitLed(void)
{
bsp_LedOff();
bsp_LedOff();
bsp_LedOff();
bsp_LedOff();
}
函数描述:
此函数主要用于LED初始化。由于将GPIO设置为输出时,GPIO输出寄存器的值缺省是0,因此会驱动LED点亮,因此在改变GPIO为输出前,先关闭LED指示灯。
注意事项:
- 大家会有疑惑,为什么这里没有初始化GPIO。这是因为V7开发板是由74HC574驱动的,不是用CPU的IO直接驱动,74HC574是一个8路并口缓冲器,挂在FMC总线上,实现IO扩展。
- 通过FMC总线扩展出的IO来驱动,不是GPIO直接驱动。
- 调用此函数前,要优先调用函数bsp_InitExtIO(),此函数用于初始化FMC扩展接口,关于这方面的知识在48章节专门做了讲解
使用举例:
调用此函数前,务必优先调用函数bsp_InitExtIO()。这里底层驱动初始化一般都是在bsp.c文件的函数bsp_Init里面调用。
18.4.2 函数bsp_LedOn
函数原型:
/*
*********************************************************************************************************
* 函 数 名: bsp_LedOn
* 功能说明: 点亮指定的LED指示灯。
* 形 参: _no : 指示灯序号,范围 1 - 4
* 返 回 值: 无
*********************************************************************************************************
*/
void bsp_LedOn(uint8_t _no)
{
if (_no == )
{
HC574_SetPin(LED1, );
}
else if (_no == )
{
HC574_SetPin(LED2, );
}
else if (_no == )
{
HC574_SetPin(LED3, );
}
else if (_no == )
{
HC574_SetPin(LED4, );
}
}
函数描述:
此函数主要用于点亮LED。
函数参数:
- 第1个参数用于指定点亮那个LED,范围1-4。
使用举例:
此函数的使用比较简单,需要调用的时候直接调用即可。另外使用前记得先调用函数bsp_InitExtIO()和bsp_InitLed。
18.4.3 函数bsp_LedOff
函数原型:
/*
*********************************************************************************************************
* 函 数 名: bsp_LedOff
* 功能说明: 熄灭指定的LED指示灯。
* 形 参: _no 指示灯序号,范围 1 - 4
* 返 回 值: 无
*********************************************************************************************************
*/
void bsp_LedOff(uint8_t _no)
{
if (_no == )
{
HC574_SetPin(LED1, );
}
else if (_no == )
{
HC574_SetPin(LED2, );
}
else if (_no == )
{
HC574_SetPin(LED3, );
}
else if (_no == )
{
HC574_SetPin(LED4, );
}
}
函数描述:
此函数主要用于熄灭LED。
函数参数:
- 第1个参数用于指定熄灭那个LED,范围1-4。
使用举例:
此函数的使用比较简单,需要调用的时候直接调用即可。另外使用前记得先调用函数bsp_InitExtIO()和bsp_InitLed。
18.4.4 函数bsp_LedToggle
函数原型:
/*
*********************************************************************************************************
* 函 数 名: bsp_LedToggle
* 功能说明: 翻转指定的LED指示灯。
* 形 参: _no 指示灯序号,范围 1 - 4
* 返 回 值: 按键代码
*********************************************************************************************************
*/
void bsp_LedToggle(uint8_t _no)
{
uint32_t pin; if (_no == )
{
pin = LED1;
}
else if (_no == )
{
pin = LED2;
}
else if (_no == )
{
pin = LED3;
}
else if (_no == )
{
pin = LED4;
}
else
{
return;
} if (HC574_GetPin(pin))
{
HC574_SetPin(pin, );
}
else
{
HC574_SetPin(pin, );
}
}
函数描述:
此函数主要用于翻转LED。
函数参数:
- 第1个参数用于指定翻转那个LED,范围1-4。
使用举例:
此函数的使用比较简单,需要调用的时候直接调用即可。另外使用前记得先调用函数bsp_InitExtIO()和bsp_InitLed。
18.4.5 函数bsp_IsLedOn
函数原型:
/*
*********************************************************************************************************
* 函 数 名: bsp_IsLedOn
* 功能说明: 判断LED指示灯是否已经点亮。
* 形 参: _no 指示灯序号,范围 1 - 4
* 返 回 值: 1表示已经点亮,0表示未点亮
*********************************************************************************************************
*/
uint8_t bsp_IsLedOn(uint8_t _no)
{
uint32_t pin; if (_no == )
{
pin = LED1;
}
else if (_no == )
{
pin = LED2;
}
else if (_no == )
{
pin = LED3;
}
else if (_no == )
{
pin = LED4;
}
else
{
return ;
} if (HC574_GetPin(pin))
{
return ; /* 灭 */
}
else
{
return ; /* 亮 */
}
}
函数描述:
此函数主要用于获取LED亮灭状态。
函数参数:
- 第1个参数用于指定获取那个LED的亮灭状态,范围1-4。
使用举例:
此函数的使用比较简单,需要调用的时候直接调用即可。另外使用前记得先调用函数bsp_InitExtIO()和bsp_InitLed。
18.5 跑马灯驱动移植和使用
跑马灯控制是基于FMC扩展IO实现的,所以跑马灯的移植需要看第48章的移植方式。
18.6 实验例程设计框架
通过程序设计框架,让大家先对配套例程有一个全面的认识,然后再理解细节,本次实验例程的设计框架如下:
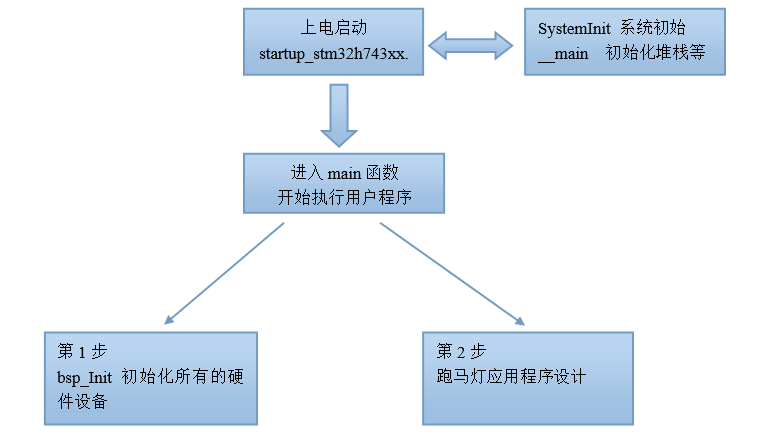
第1阶段,上电启动阶段:
这部分在第14章进行了详细说明。
第2阶段,进入main函数:
- 第1部分,硬件初始化,主要是MPU,Cache,HAL库,系统时钟,滴答定时器和LED。
- 第2部分,应用程序设计部分,实现了一个简易的跑马灯效果。
18.7 实验例程说明(MDK)
配套例子:
V7-001_跑马灯
实验目的:
- 学习H7平台的跑马灯实现。
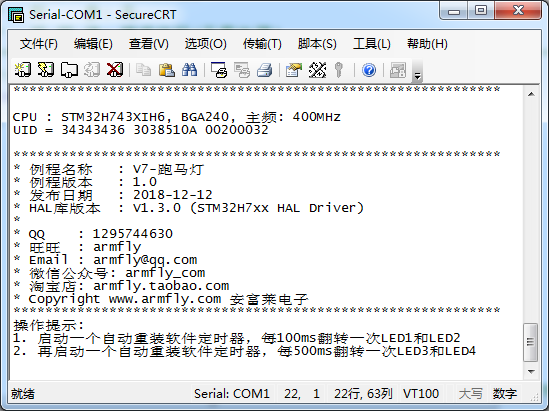
实验内容:
- 启动一个自动重装软件定时器,每100ms翻转一次LED1和LED2。
- 再启动一个自动重装软件定时器,每500ms翻转一次LED3和LED4。
上电后串口打印的信息:
波特率 115200,数据位 8,奇偶校验位无,停止位 1
程序设计:
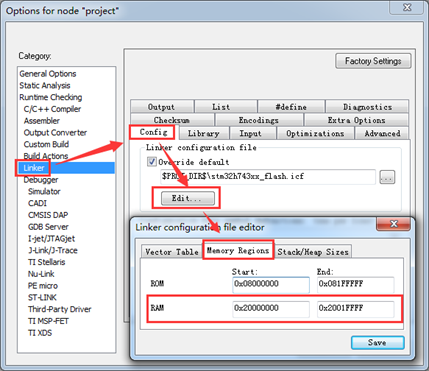
系统栈大小分配:

RAM空间用的DTCM:

硬件外设初始化
硬件外设的初始化是在 bsp.c 文件实现:
/*
*********************************************************************************************************
* 函 数 名: bsp_Init
* 功能说明: 初始化所有的硬件设备。该函数配置CPU寄存器和外设的寄存器并初始化一些全局变量。只需要调用一次
* 形 参:无
* 返 回 值: 无
*********************************************************************************************************
*/
void bsp_Init(void)
{
/* 配置MPU */
MPU_Config(); /* 使能L1 Cache */
CPU_CACHE_Enable(); /*
STM32H7xx HAL 库初始化,此时系统用的还是H7自带的64MHz,HSI时钟:
- 调用函数HAL_InitTick,初始化滴答时钟中断1ms。
- 设置NVIV优先级分组为4。
*/
HAL_Init(); /*
配置系统时钟到400MHz
- 切换使用HSE。
- 此函数会更新全局变量SystemCoreClock,并重新配置HAL_InitTick。
*/
SystemClock_Config(); /*
Event Recorder:
- 可用于代码执行时间测量,MDK5.25及其以上版本才支持,IAR不支持。
- 默认不开启,如果要使能此选项,务必看V7开发板用户手册第xx章
*/
#if Enable_EventRecorder == 1
/* 初始化EventRecorder并开启 */
EventRecorderInitialize(EventRecordAll, 1U);
EventRecorderStart();
#endif bsp_InitKey(); /* 按键初始化,要放在滴答定时器之前,因为按钮检测是通过滴答定时器扫描 */
bsp_InitTimer(); /* 初始化滴答定时器 */
bsp_InitUart(); /* 初始化串口 */
bsp_InitExtIO(); /* 初始化FMC总线74HC574扩展IO. 必须在 bsp_InitLed()前执行 */
bsp_InitLed(); /* 初始化LED */
}
MPU配置和Cache配置:
数据Cache和指令Cache都开启。配置了AXI SRAM区(本例子未用到AXI SRAM)和FMC的扩展IO区。
/*
*********************************************************************************************************
* 函 数 名: MPU_Config
* 功能说明: 配置MPU
* 形 参: 无
* 返 回 值: 无
*********************************************************************************************************
*/
static void MPU_Config( void )
{
MPU_Region_InitTypeDef MPU_InitStruct;
/* 禁止 MPU */
HAL_MPU_Disable();
/* 配置AXI SRAM的MPU属性为Write back, Read allocate,Write allocate */
MPU_InitStruct.Enable = MPU_REGION_ENABLE;
MPU_InitStruct.BaseAddress = 0x24000000;
MPU_InitStruct.Size = MPU_REGION_SIZE_512KB;
MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS;
MPU_InitStruct.IsBufferable = MPU_ACCESS_BUFFERABLE;
MPU_InitStruct.IsCacheable = MPU_ACCESS_CACHEABLE;
MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE;
MPU_InitStruct.Number = MPU_REGION_NUMBER0;
MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL1;
MPU_InitStruct.SubRegionDisable = 0x00;
MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE;
HAL_MPU_ConfigRegion(&MPU_InitStruct);
/* 配置FMC扩展IO的MPU属性为Device或者Strongly Ordered */
MPU_InitStruct.Enable = MPU_REGION_ENABLE;
MPU_InitStruct.BaseAddress = 0x60000000;
MPU_InitStruct.Size = ARM_MPU_REGION_SIZE_64KB;
MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS;
MPU_InitStruct.IsBufferable = MPU_ACCESS_BUFFERABLE;
MPU_InitStruct.IsCacheable = MPU_ACCESS_NOT_CACHEABLE;
MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE;
MPU_InitStruct.Number = MPU_REGION_NUMBER1;
MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL0;
MPU_InitStruct.SubRegionDisable = 0x00;
MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE;
HAL_MPU_ConfigRegion(&MPU_InitStruct);
/*使能 MPU */
HAL_MPU_Enable(MPU_PRIVILEGED_DEFAULT);
}
/*
*********************************************************************************************************
* 函 数 名: CPU_CACHE_Enable
* 功能说明: 使能L1 Cache
* 形 参: 无
* 返 回 值: 无
*********************************************************************************************************
*/
static void CPU_CACHE_Enable(void)
{
/* 使能 I-Cache */
SCB_EnableICache();
/* 使能 D-Cache */
SCB_EnableDCache();
}
主功能:
主功能的实现主要分为两部分:
- 启动一个自动重装软件定时器,每100ms翻转一次LED1和LED2。
- 再启动一个自动重装软件定时器,每500ms翻转一次LED3和LED4。
/*
*********************************************************************************************************
* 函 数 名: main
* 功能说明: c程序入口
* 形 参: 无
* 返 回 值: 错误代码(无需处理)
*********************************************************************************************************
*/
int main(void)
{
bsp_Init(); /* 硬件初始化 */
PrintfLogo(); /* 打印例程名称和版本等信息 */
PrintfHelp(); /* 打印操作提示 */
/* 先做个LED1的亮灭显示 */
bsp_LedOn();
bsp_DelayMS();
bsp_LedOff();
bsp_DelayMS();
bsp_StartAutoTimer(, ); /* 启动1个100ms的自动重装的定时器 */
bsp_StartAutoTimer(, ); /* 启动1个500ms的自动重装的定时器 */
/* 进入主程序循环体 */
while ()
{
bsp_Idle(); /* 这个函数在bsp.c文件。用户可以修改这个函数实现CPU休眠和喂狗 */
/* 判断定时器超时时间 */
if (bsp_CheckTimer())
{
/* 每隔100ms 进来一次 */
bsp_LedToggle();
}
/* 判断定时器超时时间 */
if (bsp_CheckTimer())
{
/* 每隔500ms 进来一次 */
bsp_LedToggle();
bsp_LedToggle();
bsp_LedToggle();
}
}
}
18.8 实验例程说明(IAR)
配套例子:
V7-001_跑马灯
实验目的:
- 学习H7平台的跑马灯实现。
实验内容:
- 启动一个自动重装软件定时器,每100ms翻转一次LED1和LED2。
- 再启动一个自动重装软件定时器,每500ms翻转一次LED3和LED4。
上电后串口打印的信息:
波特率 115200,数据位 8,奇偶校验位无,停止位 1

程序设计:
系统栈大小分配:

RAM空间用的DTCM:
硬件外设初始化
硬件外设的初始化是在 bsp.c 文件实现:
/*
*********************************************************************************************************
* 函 数 名: bsp_Init
* 功能说明: 初始化所有的硬件设备。该函数配置CPU寄存器和外设的寄存器并初始化一些全局变量。只需要调用一次
* 形 参:无
* 返 回 值: 无
*********************************************************************************************************
*/
void bsp_Init(void)
{
/* 配置MPU */
MPU_Config();
/* 使能L1 Cache */
CPU_CACHE_Enable();
/*
STM32H7xx HAL 库初始化,此时系统用的还是H7自带的64MHz,HSI时钟:
- 调用函数HAL_InitTick,初始化滴答时钟中断1ms。
- 设置NVIV优先级分组为4。
*/
HAL_Init();
/*
配置系统时钟到400MHz
- 切换使用HSE。
- 此函数会更新全局变量SystemCoreClock,并重新配置HAL_InitTick。
*/
SystemClock_Config();
/*
Event Recorder:
- 可用于代码执行时间测量,MDK5.25及其以上版本才支持,IAR不支持。
- 默认不开启,如果要使能此选项,务必看V7开发板用户手册第xx章
*/
#if Enable_EventRecorder == 1
/* 初始化EventRecorder并开启 */
EventRecorderInitialize(EventRecordAll, 1U);
EventRecorderStart();
#endif
bsp_InitKey(); /* 按键初始化,要放在滴答定时器之前,因为按钮检测是通过滴答定时器扫描 */
bsp_InitTimer(); /* 初始化滴答定时器 */
bsp_InitUart(); /* 初始化串口 */
bsp_InitExtIO(); /* 初始化FMC总线74HC574扩展IO. 必须在 bsp_InitLed()前执行 */
bsp_InitLed(); /* 初始化LED */
}
MPU配置和Cache配置:
数据Cache和指令Cache都开启。配置了AXI SRAM区(本例子未用到AXI SRAM)和FMC的扩展IO区。
/*
*********************************************************************************************************
* 函 数 名: MPU_Config
* 功能说明: 配置MPU
* 形 参: 无
* 返 回 值: 无
*********************************************************************************************************
*/
static void MPU_Config( void )
{
MPU_Region_InitTypeDef MPU_InitStruct;
/* 禁止 MPU */
HAL_MPU_Disable();
/* 配置AXI SRAM的MPU属性为Write back, Read allocate,Write allocate */
MPU_InitStruct.Enable = MPU_REGION_ENABLE;
MPU_InitStruct.BaseAddress = 0x24000000;
MPU_InitStruct.Size = MPU_REGION_SIZE_512KB;
MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS;
MPU_InitStruct.IsBufferable = MPU_ACCESS_BUFFERABLE;
MPU_InitStruct.IsCacheable = MPU_ACCESS_CACHEABLE;
MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE;
MPU_InitStruct.Number = MPU_REGION_NUMBER0;
MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL1;
MPU_InitStruct.SubRegionDisable = 0x00;
MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE;
HAL_MPU_ConfigRegion(&MPU_InitStruct);
/* 配置FMC扩展IO的MPU属性为Device或者Strongly Ordered */
MPU_InitStruct.Enable = MPU_REGION_ENABLE;
MPU_InitStruct.BaseAddress = 0x60000000;
MPU_InitStruct.Size = ARM_MPU_REGION_SIZE_64KB;
MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS;
MPU_InitStruct.IsBufferable = MPU_ACCESS_BUFFERABLE;
MPU_InitStruct.IsCacheable = MPU_ACCESS_NOT_CACHEABLE;
MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE;
MPU_InitStruct.Number = MPU_REGION_NUMBER1;
MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL0;
MPU_InitStruct.SubRegionDisable = 0x00;
MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE;
HAL_MPU_ConfigRegion(&MPU_InitStruct);
/*使能 MPU */
HAL_MPU_Enable(MPU_PRIVILEGED_DEFAULT);
}
/*
*********************************************************************************************************
* 函 数 名: CPU_CACHE_Enable
* 功能说明: 使能L1 Cache
* 形 参: 无
* 返 回 值: 无
*********************************************************************************************************
*/
static void CPU_CACHE_Enable(void)
{
/* 使能 I-Cache */
SCB_EnableICache();
/* 使能 D-Cache */
SCB_EnableDCache();
}
主功能:
主功能的实现主要分为两部分:
- 启动一个自动重装软件定时器,每100ms翻转一次LED1和LED2。
- 再启动一个自动重装软件定时器,每500ms翻转一次LED3和LED4。
/*
*********************************************************************************************************
* 函 数 名: main
* 功能说明: c程序入口
* 形 参: 无
* 返 回 值: 错误代码(无需处理)
*********************************************************************************************************
*/
int main(void)
{
bsp_Init(); /* 硬件初始化 */
PrintfLogo(); /* 打印例程名称和版本等信息 */
PrintfHelp(); /* 打印操作提示 */
/* 先做个LED1的亮灭显示 */
bsp_LedOn();
bsp_DelayMS();
bsp_LedOff();
bsp_DelayMS();
bsp_StartAutoTimer(, ); /* 启动1个100ms的自动重装的定时器 */
bsp_StartAutoTimer(, ); /* 启动1个500ms的自动重装的定时器 */
/* 进入主程序循环体 */
while ()
{
bsp_Idle(); /* 这个函数在bsp.c文件。用户可以修改这个函数实现CPU休眠和喂狗 */
/* 判断定时器超时时间 */
if (bsp_CheckTimer())
{
/* 每隔100ms 进来一次 */
bsp_LedToggle();
}
/* 判断定时器超时时间 */
if (bsp_CheckTimer())
{
/* 每隔500ms 进来一次 */
bsp_LedToggle();
bsp_LedToggle();
bsp_LedToggle();
}
}
}
18.9 总结
虽然是跑马灯的初级例程,但有必要掌握程序的基本设计框架,后面的例子都是建立在这个框架的基础上。建议初学者掌握好。
【STM32H7教程】第18章 STM32H7的GPIO应用之跑马灯的更多相关文章
- 【STM32H7教程】第20章 STM32H7的GPIO应用之无源蜂鸣器
完整教程下载地址:http://www.armbbs.cn/forum.php?mod=viewthread&tid=86980 第20章 STM32H7的GPIO应用之无源蜂鸣器 ...
- 【STM32H7教程】第19章 STM32H7的GPIO应用之按键FIFO
完整教程下载地址:http://www.armbbs.cn/forum.php?mod=viewthread&tid=86980 第19章 STM32H7的GPIO应用之按键FIF ...
- 【STM32H7教程】第17章 STM32H7之GPIO的HAL库API
完整教程下载地址:http://www.armbbs.cn/forum.php?mod=viewthread&tid=86980 第17章 STM32H7之GPIO的HAL库API ...
- 【STM32H7教程】第15章 STM32H7的GPIO基础知识(重要)
完整教程下载地址:http://www.armbbs.cn/forum.php?mod=viewthread&tid=86980 第15章 STM32H7的GPIO基础知识(重要) ...
- 【STM32H7教程】第30章 STM32H7的USART应用之八个串口FIFO实现
完整教程下载地址:http://www.armbbs.cn/forum.php?mod=viewthread&tid=86980 第30章 STM32H7的USART应用之八个串口 ...
- 【STM32H7教程】第29章 STM32H7的USART串口基础知识和HAL库API
完整教程下载地址:http://www.armbbs.cn/forum.php?mod=viewthread&tid=86980 第29章 STM32H7的USART串口基础知识和 ...
- 【STM32H7教程】第48章 STM32H7的FMC总线应用之是32路高速IO扩展
完整教程下载地址:http://www.armbbs.cn/forum.php?mod=viewthread&tid=86980 第48章 STM32H7的FMC总线应用之是32路 ...
- 【STM32H7教程】第8章 STM32H7的终极调试组件Event Recorder
完整教程下载地址:http://forum.armfly.com/forum.php?mod=viewthread&tid=86980 第8章 STM32H7的终极调试组件Event Re ...
- 【STM32H7教程】第9章 STM32H7重要知识点数据类型,变量和堆栈
完整教程下载地址:http://forum.armfly.com/forum.php?mod=viewthread&tid=86980 第9章 STM32H7重要知识点数据类型,变量和堆栈 ...
随机推荐
- react-router刷新页面Cannot GET 问题
最近在做项目的时候遇到了如下错误 并在控制台看到了如下的报错 我先是按照控制台的错误搜索,得出的结果都是对meta头部进行设置,允许资源请求,但是问题依然没有解决,偶然间改变了想法,会不会是路由的问题 ...
- celery执行异步任务和定时任务
一.什么是Clelery Celery是一个简单.灵活且可靠的,处理大量消息的分布式系统 专注于实时处理的异步任务队列 同时也支持任务调度 Celery架构 Celery的架构由三部分组成,消息中间件 ...
- Python元组是什么
引出 在使用Python过程中,列表.集合和字典是比较常用的数据结构. 列表简单说就是数组,不对,它就是数组 集合就是去重的元素结构,和JAVA中的set一样 字典就是一个key-value的键值对, ...
- 10. 函数-lambda函数及高阶函数
一.匿名函数解析 关键字lambda表示匿名函数,冒号前面的n表示函数参数,可以有多个参数.匿名函数有个限制,就是只能有一个表达式,不用写return,返回值就是该表达式的结果. 用匿名函数有 ...
- luoguP1871 对撞机【赛后第一题
题面 题目描述 在2312年,宇宙中发现了n台巨型对撞机,这些对撞机分别用1-n的自然数标识.科学家们不知道启动这些对撞机会发生什么危险事故,所以这些机器,刚开始都是出于关闭的状态. 随着科学家们的研 ...
- DynamicList
DynamicList设计要点——类模板 申请连续空间作为顺序存储空间 动态设置顺序存储空间的大小 保证重置顺序存储空间时的异常安全性 DynamicList设计要点——函数异常安全的概念 不泄露任何 ...
- 第K个语法符号
在第一行我们写上一个 0.接下来的每一行,将前一行中的0替换为01,1替换为10. 给定行数 N 和序数 K,返回第 N 行中第 K个字符.(K从1开始) 例子: 输入: N = 1, K = 1输出 ...
- MyBatis的ResultMapping和ResultMap
MyBatis的ResultMapping和ResultMap Effective java 第3版中描述的Builder模式 Java设计模式14:建造者模式 2个类都使用了Builder来构建对象 ...
- Ubuntu16.04重装NVIDIA驱动
Ubuntu系统 $ sudo apt update $ sudo apt upgrade 之后出现显卡驱动出现故障,nvidia-smi输出有错,检测不到相应的驱动.只好重装,记录一下,太多的教程根 ...
- css 揭秘-读书笔记
css 揭秘 [希]Lea verou 著 css 魔法 译 该书涵盖7大主题,47个css技巧,是css进阶必备书籍,开阔思路,探寻更优雅的解决方案.这本书完全用css渲染出的html写成的(布局. ...