opencv实践::透视变换
问题描述
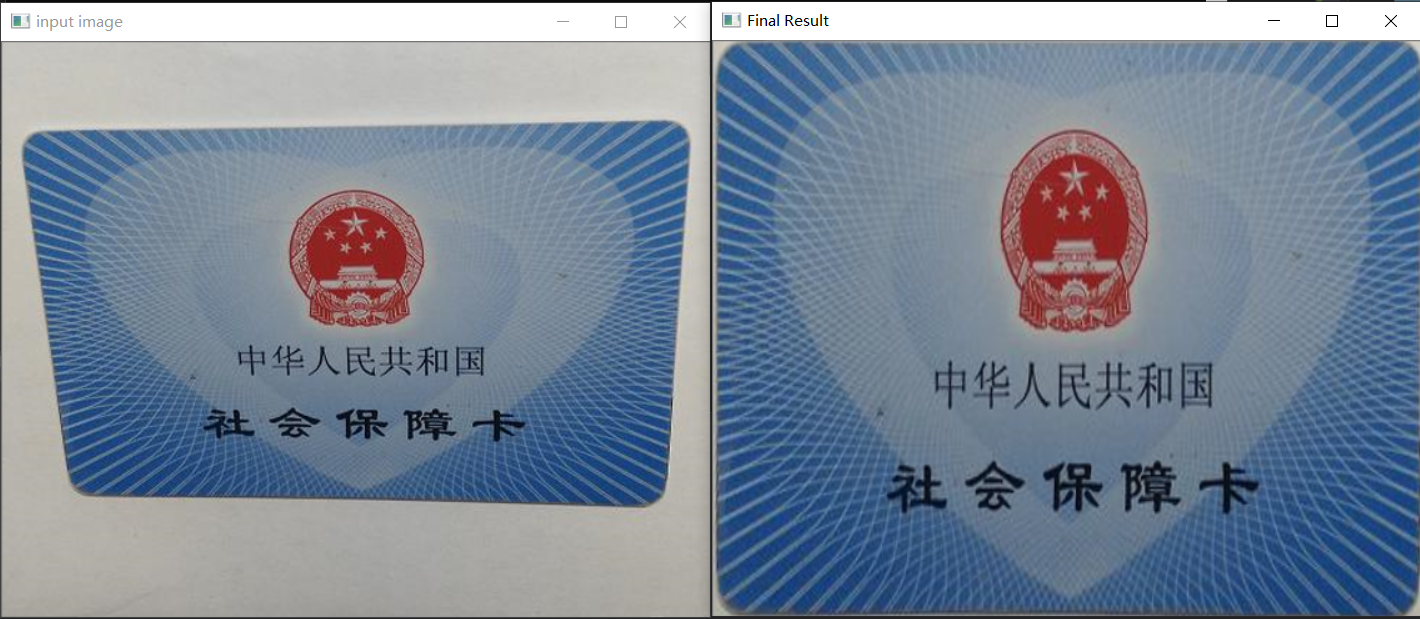
拍摄或者扫描图像不是规则的矩形,会对后期处理产生不 好影响,需要通过透视变换校正得到正确形状。
解决思路
通过二值分割 + 形态学方法 + Hough直线 +透视变换
#include <opencv2/opencv.hpp>
#include <iostream>
#include <math.h> using namespace cv;
using namespace std; int main(int argc, char** argv) {
Mat src = imread("D:/case6.png");
if (src.empty()) {
printf("could not load image...\n");
return ;
}
namedWindow("input image", CV_WINDOW_AUTOSIZE);
imshow("input image", src); // 二值处理 取反
Mat gray_src, binary, dst;
cvtColor(src, gray_src, COLOR_BGR2GRAY);
threshold(gray_src, binary, , , THRESH_BINARY_INV | THRESH_OTSU);
//imshow("binary image", binary); // 形态学操作
Mat kernel = getStructuringElement(MORPH_RECT, Size(, ), Point(-, -));
morphologyEx(binary, dst, MORPH_CLOSE, kernel, Point(-, -), );
//imshow("morphology", dst); // 轮廓发现
bitwise_not(dst, dst, Mat());
vector<vector<Point>> contours;
vector<Vec4i> hireachy;
findContours(dst, contours, hireachy, CV_RETR_TREE, CHAIN_APPROX_SIMPLE, Point()); // 轮廓绘t制
int width = src.cols;
int height = src.rows;
Mat drawImage = Mat::zeros(src.size(), CV_8UC3);
for (size_t t = ; t < contours.size(); t++) {
Rect rect = boundingRect(contours[t]);
if (rect.width > width / && rect.width < width - ) {
drawContours(drawImage, contours, static_cast<int>(t), Scalar(, , ), , , hireachy, , Point());
}
}
//imshow("contours", drawImage); vector<Vec4i> lines;
Mat contoursImg;
int accu = min(width*0.5, height*0.5);
cvtColor(drawImage, contoursImg, COLOR_BGR2GRAY);
HoughLinesP(contoursImg, lines, CV_HOUGH_PROBABILISTIC, CV_PI / 200.0, accu, accu, );
Mat linesImage = Mat::zeros(src.size(), CV_8UC3);
for (size_t t = ; t < lines.size(); t++) {
Vec4i ln = lines[t];
line(linesImage, Point(ln[], ln[]), Point(ln[], ln[]), Scalar(, , ), , , );
}
printf("number of lines : %d\n", lines.size());
//imshow("lines image", linesImage); // 寻找与定位上下左右四条直线
int deltah = ;
Vec4i topLine, bottomLine;
Vec4i leftLine, rightLine;
for (int i = ; i < lines.size(); i++) {
Vec4i ln = lines[i];
deltah = abs(ln[] - ln[]);
if (ln[] < height / 2.0 && ln[] < height / 2.0 && deltah < accu - ) {
if (topLine[] > ln[] && topLine[] > ) {
topLine = lines[i];
}
else {
topLine = lines[i];
}
}
if (ln[] > height / 2.0 && ln[] > height / 2.0 && deltah < accu - ) {
bottomLine = lines[i];
}
if (ln[] < width / 2.0 && ln[] < width / 2.0) {
leftLine = lines[i];
}
if (ln[] > width / 2.0 && ln[] > width / 2.0) {
rightLine = lines[i];
}
}
cout << "top line : p1(x, y) = " << topLine[] << "," << topLine[] << " p2(x, y) = " << topLine[] << "," << topLine[] << endl;
cout << "bottom line : p1(x, y) = " << bottomLine[] << "," << bottomLine[] << " p2(x, y) = " << bottomLine[] << "," << bottomLine[] << endl;
cout << "left line : p1(x, y) = " << leftLine[] << "," << leftLine[] << " p2(x, y) = " << leftLine[] << "," << leftLine[] << endl;
cout << "right line : p1(x, y) = " << rightLine[] << "," << rightLine[] << " p2(x, y) = " << rightLine[] << "," << rightLine[] << endl; // 拟合四条直线方程,求直线相交的点
float k1, c1;
k1 = float(topLine[] - topLine[]) / float(topLine[] - topLine[]);
c1 = topLine[] - k1 * topLine[];
float k2, c2;
k2 = float(bottomLine[] - bottomLine[]) / float(bottomLine[] - bottomLine[]);
c2 = bottomLine[] - k2 * bottomLine[];
float k3, c3;
k3 = float(leftLine[] - leftLine[]) / float(leftLine[] - leftLine[]);
c3 = leftLine[] - k3 * leftLine[];
float k4, c4;
k4 = float(rightLine[] - rightLine[]) / float(rightLine[] - rightLine[]);
c4 = rightLine[] - k4 * rightLine[]; // 四条直线交点
Point p1; // 左上角
p1.x = static_cast<int>((c1 - c3) / (k3 - k1));
p1.y = static_cast<int>(k1*p1.x + c1);
Point p2; // 右上角
p2.x = static_cast<int>((c1 - c4) / (k4 - k1));
p2.y = static_cast<int>(k1*p2.x + c1);
Point p3; // 左下角
p3.x = static_cast<int>((c2 - c3) / (k3 - k2));
p3.y = static_cast<int>(k2*p3.x + c2);
Point p4; // 右下角
p4.x = static_cast<int>((c2 - c4) / (k4 - k2));
p4.y = static_cast<int>(k2*p4.x + c2);
cout << "p1(x, y)=" << p1.x << "," << p1.y << endl;
cout << "p2(x, y)=" << p2.x << "," << p2.y << endl;
cout << "p3(x, y)=" << p3.x << "," << p3.y << endl;
cout << "p4(x, y)=" << p4.x << "," << p4.y << endl; // 显示四个点坐标
circle(linesImage, p1, , Scalar(, , ), , , );
circle(linesImage, p2, , Scalar(, , ), , , );
circle(linesImage, p3, , Scalar(, , ), , , );
circle(linesImage, p4, , Scalar(, , ), , , );
line(linesImage, Point(topLine[], topLine[]), Point(topLine[], topLine[]), Scalar(, , ), , , );
//imshow("four corners", linesImage); // 透视变换
vector<Point2f> src_corners();
src_corners[] = p1;
src_corners[] = p2;
src_corners[] = p3;
src_corners[] = p4; vector<Point2f> dst_corners();
dst_corners[] = Point(, );
dst_corners[] = Point(width, );
dst_corners[] = Point(, height);
dst_corners[] = Point(width, height); // 获取透视变换矩阵
Mat resultImage;
Mat warpmatrix = getPerspectiveTransform(src_corners, dst_corners);
warpPerspective(src, resultImage, warpmatrix, resultImage.size(), INTER_LINEAR);
namedWindow("Final Result", CV_WINDOW_AUTOSIZE);
imshow("Final Result", resultImage); waitKey();
return ;
}
opencv实践::透视变换的更多相关文章
- OpenCV】透视变换 Perspective Transformation(续)
载分 [OpenCV]透视变换 Perspective Transformation(续) 分类: [图像处理] [编程语言] 2014-05-27 09:39 2776人阅读 评论(13) 收藏 举 ...
- 【OpenCV】透视变换矫正
演示结果参考: 功能实现:运行程序,会显示图片的尺寸,按回车键后,依次点击需矫正的图片的左上.右上.左下.右下角,并能显示其坐标,结果弹出矫正后的图片,如图上的PIC2对话框.可以继续选择图片四个点进 ...
- SVM:从理论到OpenCV实践
(转载请注明出处:http://blog.csdn.net/zhazhiqiang/ 未经允许请勿用于商业用途) 一.理论 参考网友的博客: (1)[理论]支持向量机1: Maximum Marg ...
- HOG:从理论到OpenCV实践
(转载请注明出处:http://blog.csdn.net/zhazhiqiang/ 未经允许请勿用于商业用途) 一.理论 1.HOG特征描述子的定义: locally normalised ...
- 【opencv实践】边缘检测
边缘检测: 一.canny算子 Canny边缘检测根据对信噪比与定位乘积进行测度,得到最优化逼近算子,也就是Canny算子.类似与 LoG 边缘检测方法,也属于先平滑后求导数的方法. 二.canny算 ...
- OpenCV实践之路——人脸检测(C++/Python) 【转】
转自:http://blog.csdn.net/xingchenbingbuyu/article/details/51105159 版权声明:本文为博主原创文章,转载请联系作者取得授权. 本文由@星沉 ...
- OpenCV实践之路——Python的安装和使用
本文由@星沉阁冰不语出品,转载请注明作者和出处. 文章链接:http://blog.csdn.net/xingchenbingbuyu/article/details/50936076 微博:http ...
- opencv实践::对象提取与测量
问题描述 照片是来自太空望远镜的星云图像,科学家想知道它的面 积与周长. 解决思路 方法一: 通过二值分割+图像形态学+轮廓提取 #include <opencv2/opencv.hpp> ...
- opencv实践::对象计数
问题描述 真实案例,农业领域经常需要计算对象个数 或者在其它领域拍照自动计数,可以提供效率,减低成本 解决思路 通过二值分割+形态学处理+距离变换+连通区域计算 #include <opencv ...
随机推荐
- Docker在IDEA中的使用以及如何部署到服务器
IDEA中实现一键部署到服务器 点击运行自动部署到服务器: 服务器上安装docker 1,添加yum源 # yum install epel-release –y# yum clean all# yu ...
- C#下载http/https的pdf、excel等文件(非在线打开,绕开插件)
非本服务器文件,如PDF,excel等,下载一般是通过href=‘远程文件的http或者https’的方式下载,但是如果浏览器已经有PDF插件了,则用href不是下载,而是在线打开了,影响体验,所以远 ...
- python小基础
1.计算机基础知识 中央处理器 CPU 人的大脑 内存 缓存数据 临时记忆 硬盘 储存数据 永久记忆 什么是操作系统 ? 控制计算机工作的流程 什么是应用程序? 安装在操作系统之上的软件 2.pyth ...
- 11-常用SQL总结
1.设置表的列不能为nullalter table run.dbo.T1 alter column Col1 int not null 2.给表添加主键alter table run.dbo.T1 a ...
- scrapy框架来爬取壁纸网站并将图片下载到本地文件中
首先需要确定要爬取的内容,所以第一步就应该是要确定要爬的字段: 首先去items中确定要爬的内容 class MeizhuoItem(scrapy.Item): # define the fields ...
- SpringBoot起飞系列-Web开发(四)
一.前言 从今天你开始我们就开始进行我们的web开发,之前的一篇用SpringBoot起飞系列-使用idea搭建环境(二)已经说明了我们如何进行开发,当然这是搭建起步,接下来我们就开始进行详细的开发, ...
- Spring Boot 梳理 - 4个核心
Spring Boot 魔法的核心:自动配置.起步依赖.命令行界面.Actuator 自动配置: 不用手动配置JdbcTemplate的Bean 不用手动配置DataSource的Bean Sprin ...
- .net core 使用Rotativa创建PDF文档
一.下载Rotaiva 工具 = > NuGet包管理器 = > 管理解决方案的NuGet程序包 在打开的页面中搜索 Rotativa.AspNetCore 如下图: 选中红框的记 ...
- java8 Stream使用总结
[前言] java8新特性 java8 函数接口 java8 Optional使用总结 Java 8 时间日期使用 java8 lambda表达式 1.流的介绍 Java8 中的 Stream 是对集 ...
- maven 项目报错org.apache.ibatis.binding.BindingException: Invalid bound statement (not found)解决
idea在使用maven构建的项目中使用mybatis时报错org.apache.ibatis.binding.BindingException: Invalid bound statement (n ...